ŕ ma femme, Hélčne, et mes fils,
ŕ tous mes anciens élčves,
en particulier ŕ
Diane, Johanne, Xavier,...
mais aussi ŕ tous ceux qui étaient en difficulté et qui m’ont conduit ŕ réfléchir sur les mathématiques.
...On n’écrit pas pour soi, on n’écrit pas pour les autres, on écrit aux autres, bien qu’on
ne sache pas exactement ŕ qui...
Pierre Reverdy.
Ce livre se compose de trois chapitres.
Le premier est un historique rapide de la géométrie : on essaie de montrer pourquoi la
naissance des géométries non euclidiennes a été aussi longue et difficile malgré la
qualité des savants qui se sont intéressés au problčme. Cette partie est accessible ŕ
tous.
Dans le second chapitre, on détaille les approches d’un certain nombre de mathématiciens. On le fait avec les connaissances qu’ils pouvaient avoir ŕ leur époque, c’est-ŕ-dire, celles qui sont données dans les Eléments d’Euclide. C’est pour cela que ce chapitre commence par l’énoncé des postulats ou axiomes utiles et celui des théorčmes d’Euclide qui seront utilisés ainsi que certaines de leurs démonstrations lorsqu’elles présentent un manque ou un problčme.
Cette partie peut s’adresser ŕ tout le monde mais elle demande un effort important. Si les connaissances demandées en géométrie sont élémentaires (un élčve de troisičme les a !), il faut s’efforcer de raisonner en n’utilisant que les théorčmes auxquels on a droit. Il faut renoncer ŕ ce qui nous semble évident. Par exemple, dans certains cas un quadrilatčre pourra avoir trois angles droits sans ętre un rectangle, ou alors par deux points distincts pourront passer plusieurs droites, etc...
Enfin toutes les figures tracées le sont comme si on était dans le cadre euclidien, alors qu’on ne
le sera pas !
Le troisičme chapitre peut ętre lu par tous ceux qui ont des connaissances sur les nombres complexes, la structure de groupe et les fonctions holomorphes ou le calcul intégral. Une des conclusions sera que le parallélisme n’est...pas toujours une propriété essentielle.
Géométrie étymologiquement signifie mesure de la terre. Donc au départ la géométrie repose sur l’intuition que nous avons des objets qui nous entourent : droites, cercles, triangles et toutes les figures que l’on peut construire ŕ partir de lŕ. Le rôle du mathématicien sera de définir, d’ordonner, de démontrer, de dépasser notre intuition, nos sens qui, chacun le sait, peuvent facilement nous induire en erreur.
L’histoire de la géométrie et plus généralement celle des mathématiques est liée ŕ l’étude de leur lien avec ce que l’on appelle le réel, réel qui est une notion pas facile ŕ définir et qui évolue avec nos connaissances !.
Chacun d’entre nous est familiarisé avec la géométrie qu’on appelle euclidienne(GE). Elle correspond ŕ notre environnement immédiat : formes géométriques usuelles, droites parallčles et perpendiculaires, longueur, surface, etc...
Et nous avons la certitude que, par un point, il passe une et une seule droite parallčle ŕ une droite donnée. Cette certitude est équivalente au cinquičme postulat d’Euclide sur lequel nous reviendrons naturellement. Nous le nommerons P5. Nous réfléchirons aussi au sens qu’il faut donner ŕ "postulat". Quelle différence y a-t-il avec "axiome" ?
On peut démontrer que P5 est encore équivalent ŕ l’énoncé : dans un triangle la somme des angles est égale ŕ 180 degrés.
P5 occupe une place particuličre chez Euclide (nous verrons en quoi plus loin). C’est un postulat
donc un énoncé dont on ne sait s’il est démontrable ou non. Les mathématiciens, pendant des
sičcles, vont s’efforcer de le démontrer.
Les géométries non euclidiennes (GNE) nient cette proposition . Ainsi on va affirmer soit qu’il
n’existe aucune droite parallčle ŕ une autre, soit au contraire que, par un point, il existe
une ou plusieurs droites parallčles ŕ une droite donnée ou encore dans un triangle
la somme des angles est inférieure ou supérieure ŕ 180 degrés . Avouons que cela
sort de notre compréhension immédiate et surtout de notre intuition. Et... on peut
demander ŕ quoi cela sert de remettre en cause des choses qui nous semblent tellement vraies.
Pourquoi ces nouvelles géométries ? Pourquoi leur découverte est-elle ex- -traordinaire ou importante ? Pourquoi ont elles été rejetées avec tant de virulence et violence par des esprits parfois trčs brillants ? Si Galilée, en remettant en cause la cosmologie aristotélicienne, a bouleversé au XVIIe notre appréhension de l’univers et donc la place de l’ętre humain, en quoi l’existence d’autres géométries possibles que celle dans laquelle on baigne en permanence transforme notre vision du réel ?
Aborder ces questions est une occasion de réfléchir sur les mathématiques, tout en en faisant, d’expliciter leur relation avec les autres savoirs et d’étudier la naissance d’une idée : comment elle apparaît, pourquoi ŕ une certaine époque et pas auparavant ? Pourquoi pendant plus de deux mille ans on va tourner autour sans avancer ? Qu’est-ce qu’une théorie mathématique vraie ?
Pour tenter d’apporter quelques réponses il faut se plonger dans les mathématiques grecques et plus généralement dans les connaissances des grecs, établir certaines liaisons entre mathématiques et autres savoirs, s’intéresser aux différentes tentatives faites aux différentes époques pour démontrer P5.
Se lancer dans une aventure c’est sortir de ses certitudes. En cela, la découverte d’autres géométries est une aventure et on va voir que ce n’est pas facile !
Qu’est-ce que les mathématiques ? On pourrait passer des années ŕ tenter d’en trouver une définition ! D’autant plus que leur définition évolue avec les découvertes que l’on y fait. Mais n’est-ce pas la męme chose avec les autres savoirs ? Qu’est-ce que la littérature, la philosophie, l’art ? etc...
Certains font naître les mathématiques avec Thalčs au VIIe sičcle avant J.C. Pourtant on sait que les Babyloniens avaient déjŕ en -1750 des connaissances précises des grandeurs numériques : ils savaient par exemple que ou encore avaient conçu un algorithme capable de leur donner une approximation de (1). Ils avaient en outre une bonne connaissance des calculs .
Quant aux Egyptiens ils faisaient aussi de la géométrie bien avant Thalčs !
Alors pourquoi parler de Thalčs ? Parce que les grecs seraient les premiers ŕ avoir tenté de construire avec rigueur des mathématiques en dépassant le stade de l’évidence.
Les Grecs seraient les premiers ŕ regarder les objets géométriques en tentant de les abstraire du monde physique. Ils les définissent abstraitement et leur attribuent des propriétés initiales évidentes. A partir de lŕ ils énoncent des propriétés qu’ils démontrent logiquement.
Mais ne pourrait-on pas constater que, lorsque que des hommes fondent une communauté, ils abordent beaucoup de savoirs simultanément ? Ne font-ils pas des mathématiques dčs qu’ils ont besoin de se dénombrer, recenser leurs biens, prévoir l’avenir ? Ne font-ils pas de l’histoire dčs qu’ils apprennent ŕ leurs enfants le passé du groupe ? N’ont-ils pas dčs le départ des activités artistiques ŕ travers leurs chants, leurs contes, les bijoux, leurs outils ? En fait dater la naissance d’un savoir est toujours difficile et arbitraire, d’autant plus qu’il est difficile d’en donner une définition. C’est le cas des mathématiques.
Vouloir dater la naissance d’un savoir n’est-ce pas finalement prétendre dater la naissance de l’humanité ?
Ce que l’on peut affirmer c’est que les mathématiques grecques se développent dčs le VIe
sičcle avant J.C. considérablement...mais comme tous les autres savoirs : l’histoire avec Thucydide,
la tragédie avec Sophocle, la comédie avec Aristophane, la philosophie avec Platon et surtout le
passage ŕ l’écrit est déterminant !
Au VIe sičcle avant J.C les mathématiques se construisent comme une conception
mathématique de l’univers : le nombre est une quantité discrčte, c’est-ŕ dire un multiple entier
de l’unité (1) et inversement toute grandeur continue (ligne, surface, solide,...) peut ętre identifiée
ŕ un nombre, ŕ un nombre entier qui la mesure ou ŕ un rapport entre deux nombres : dans cette
conception tout est nombre ou rapport entre deux nombres ! L’univers se décrit donc avec des
nombres. C’est la conception des pythagoriciens.
Les Grecs ne considérant (2) comme nombres que les nombres entiers cette conception sera remise en cause avec la découverte des grandeurs que nous appelons aujourd’hui nombres irrationnels (3). (Les mathématiciens avaient ainsi inventé au Ve avant J.C. un objet mathématique qui ne rentrait pas dans leur systčme de pensée).
La synthčse des mathématiques grecques est réalisée par Euclide au début du troisičme sičcle avant J.C.. Mais cette synthčse est le résultat des travaux des mathématiciens ou philosophes qui non seulement ont fait progresser les connaissances mais aussi ont réfléchi ŕ leur lien avec le monde réel, problčme qui est posé encore aujourd’hui ! Nous développerons un peu plus loin ce point.
Les Grecs mettront quatre sičcles ŕ construire les Eléments d’Euclide. Ils sont le résultat de
la réflexion de Thalčs, Pythagore, Platon, Aristote et de tous ceux qui entourent ces grands
penseurs.
Euclide aura le mérite de réaliser la synthčse de ces travaux, au début du troisičme sičcle
avant J.C. Cette synthčse représentera pendant 2000 ans l’oeuvre de référence des
mathématiques. On ne sait pas grand chose d’Euclide, si ce n’est qu’il vivait ŕ Alexandrie. Il
n’était sans doute pas tout seul ŕ rédiger ce travail.
Męme si les arabes ont apporté au Moyen Age beaucoup de connaissances, ce n’est qu’avec l’émergence, de ce que l’on appelle aujourd’hui "analyse" (1) avec Newton, Euler, Laplace,etc..., que les Eléments d’Euclide seront remis en cause, en tant que synthčse.
Montucla (2), ŕ la fin du XVIIIe, affirme qu’Euclide "mit dans son livre cet enchaînement si admiré par les amateurs de la rigueur géométrique...En vain, divers géomčtres, ŕ qui cet arrangement a déplu ont tâché de le réformer. Leurs efforts impuissants ont fait voir combien il était difficile de substituer ŕ la chaîne formée par le géomčtre grec une autre aussi ferme et aussi solide".
Męme si ce jugement sera discuté dans les sičcles suivants il montre ŕ quel point les
éléments d’Euclide auront été importants et auront imprégné tous les mathématiciens ou les
philosophes jusqu’au XVIIe sičcle.
Autre citation, mais celle-ci du XXe, : au début des Eléments de Nicolas Bourbaki (3), on trouve cette phrase : " ce qui était une démonstration pour Euclide en est toujours une ŕ nos yeux".
Les éléments d’Euclide sont composés de treize livres :
Les quatre premiers livres traitent de la géométrie plane. Mais un certain nombre de théorčmes peuvent ętre traduits en utilisant l’algčbre d’aujourd’hui et, par exemple, la proposition 4 du livre 2 permet de résoudre une équation du second degré.
Le livre 5 est un gros livre qui traite des proportions. Ses résultats vont ętre appliqués ŕ la géométrie plane dans le livre 6.
Les trois livres suivants forment un traité d’arithmétique dans lequel on démontre beaucoup des propriétés qu’apprennent nos lycéens d’aujourd’hui.
Le livre 10 traite des grandeurs incommensurables que, de nos jours, nous appellerions irrationnelles.
Les livres 11 et 13 traitent la géométrie de l’espace.
Le livre 12 nous parle des aires curvilignes en les comparant aux aires des polygones par la méthode d’exhaustion.
L’ensemble est d’une trčs grande rigueur, parfaitement ordonné et d’une grande cohérence. On y sent la présence des philosophes ou mathématiciens, que ce soit Aristote ou Platon (1) ou d’autres.
Le livre qui nous intéresse particuličrement ici est le premier.
Il y a d’abord 35 définitions ensuite 6 postulats et 9 axiomes, enfin 48 théorčmes. Il faut passer
un peu de temps sur chacun des mots : définition, postulat et axiome. Aristote un sičcle plus tôt a
posé les bases de la logique. Euclide va les utiliser.
Il y a neuf axiomes que les grecs dénomment "notions communes" Il s’agit de propositions dont on
aura besoin et dont on affirme qu’elles sont indémontrables et vraies : on ne peut pas les remettre en
cause. Ces notions communes s’appliquent ŕ toutes les grandeurs quelles qu’elles soient,
numériques, géométriques ou non.
( 1) Platon définit parfaitement le travail du mathématicien (quelle que soit l’époque !) dans République (IV 510 c et d). Une démonstration se déroule est une suite d’opérations, définies par des rčgles, qui permettent de passer d’une affirmation ŕ une autre. Il indique, en particulier, que la figure que l’on trace n’est que l’image d’une figure parfaite, abstraite, que l’on ne peut appréhender que par la pensée.
Par exemple, le dernier axiome est : "Le tout est plus grand que la partie". Ceci est faux
dans les ensembles infinis mais vrai dans les ensembles finis. Chez les Grecs toute chose
est finie. L’infini n’existe pas ou tout du moins dans notre sens. C’est un sujet traité
abondamment par les philosophes grecs (1). C’est un problčme essentiel dans les éléments
d’Euclide.
Il y a six postulats : postulat vient du latin postulatum qui signifie "demande". Il s’agit de propositions, s’appliquant ŕ des objets géométriques, dont on aura besoin par la suite pour démontrer des théorčmes . Quel est le statut du postulat par rapport ŕ l’axiome ? la réponse n’est pas évidente et fera l’objet au cours des sičcles de longs débats.
Donnons deux exemples :
La premičre demande est "de pouvoir joindre tout point donné ŕ tout autre point donné par
une ligne droite". Est-ce un théorčme ? Et dans ce cas faudra-t-il le démontrer ? La question est
ouverte. Au départ il nous permettra d’affirmer l’existence d’une droite joignant deux
points.
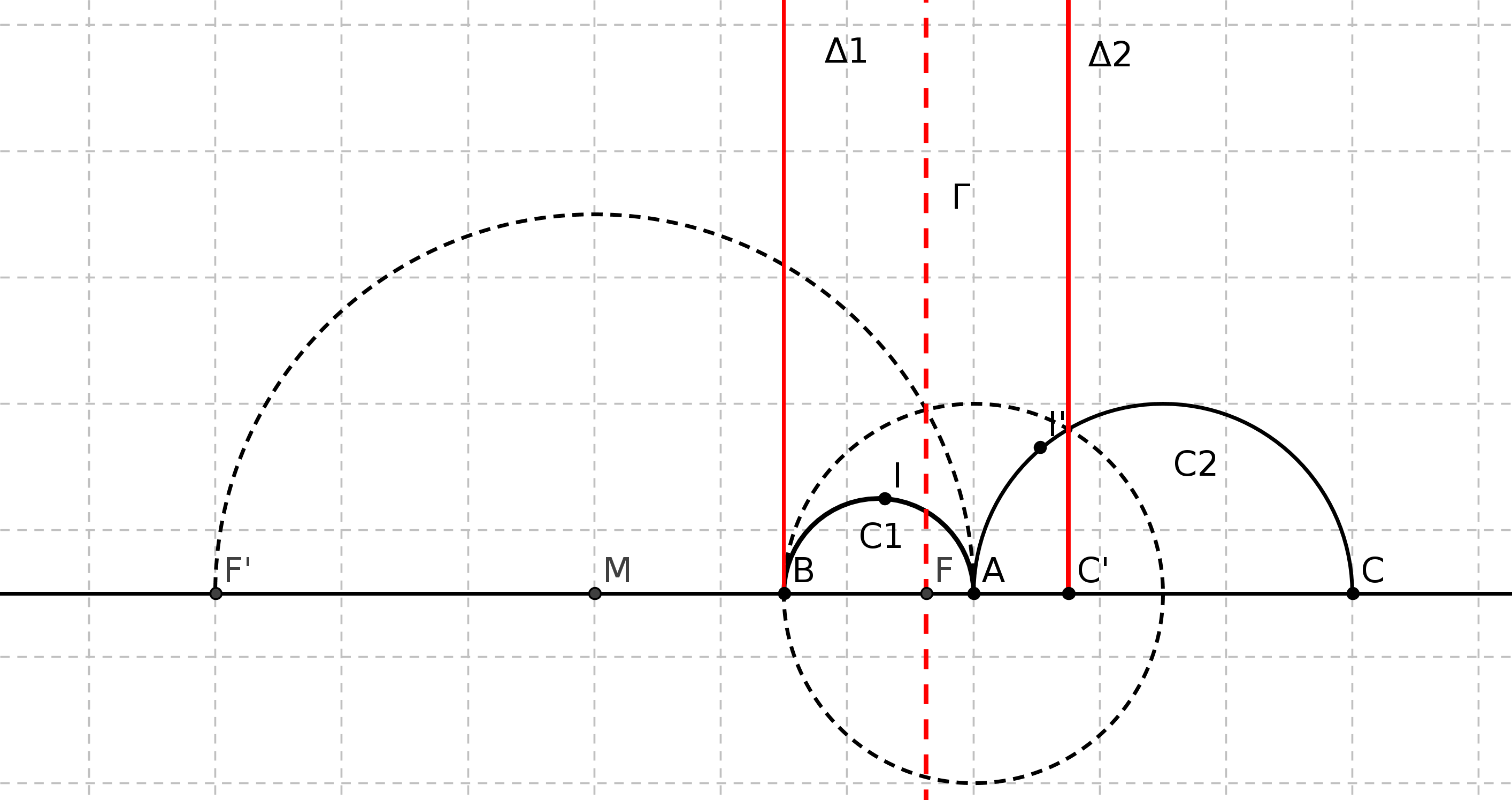
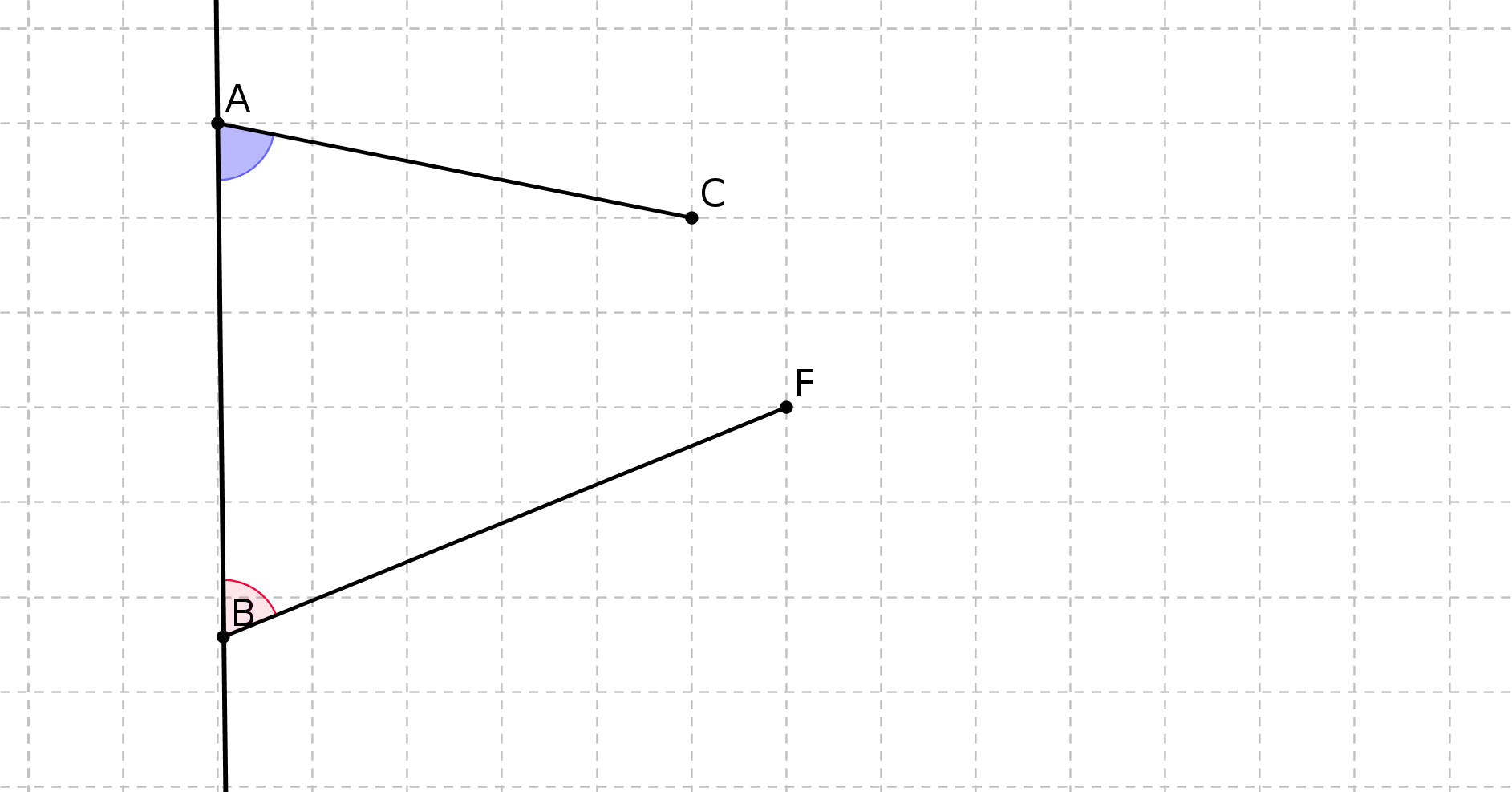
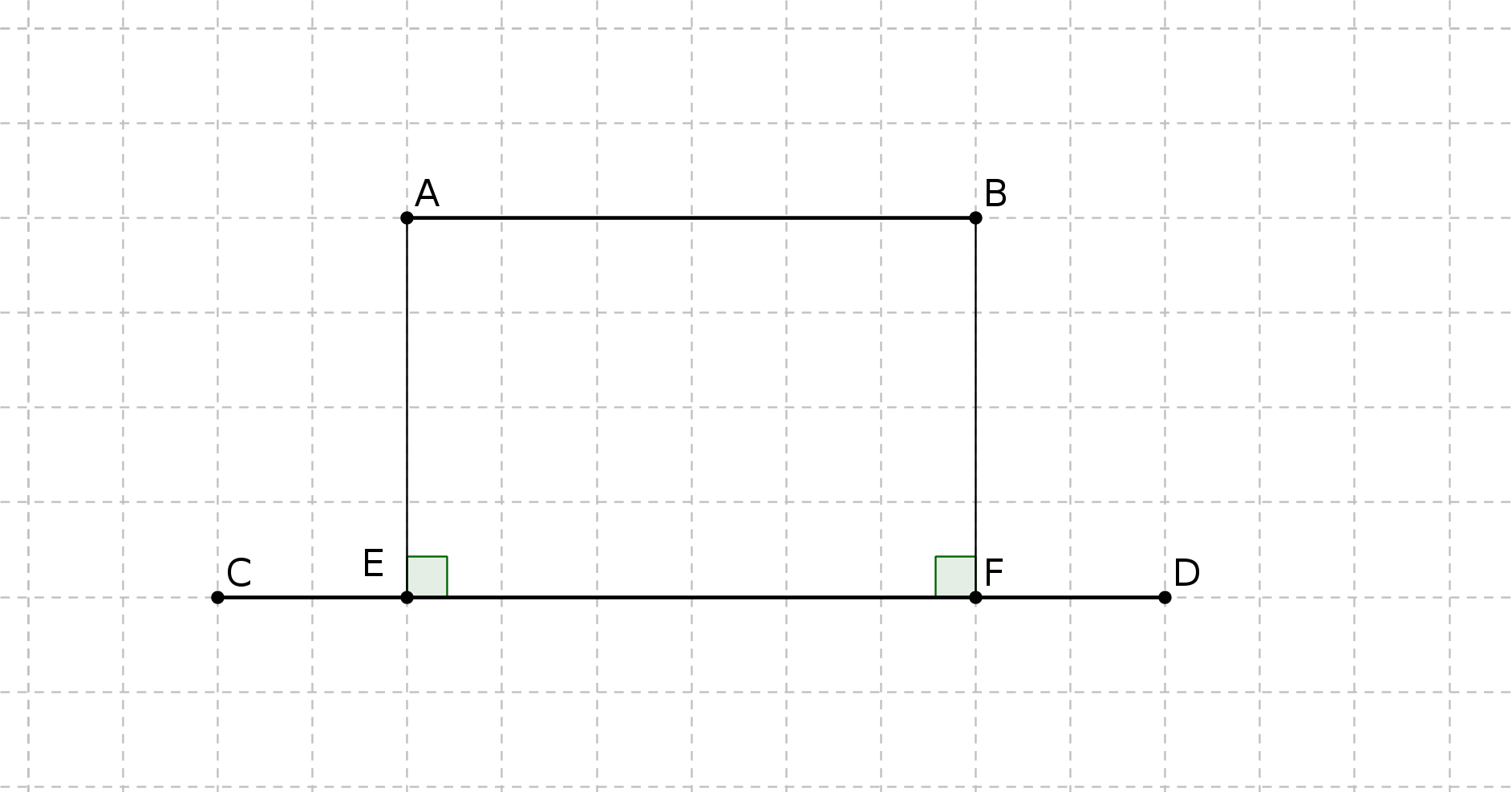
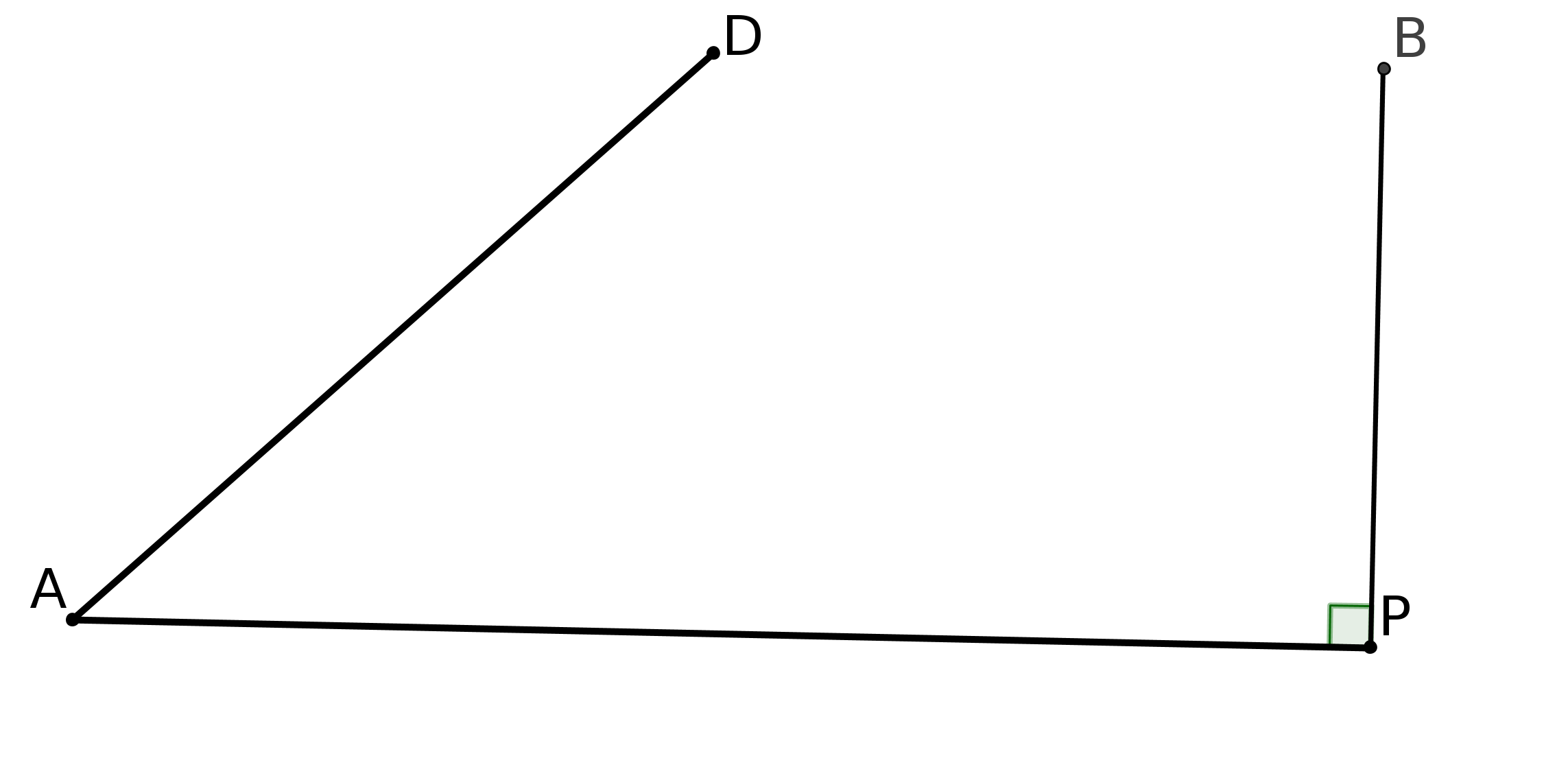
Le cinquičme postulat est le fameux P5 : si une droite, tombant sur deux droites, fait les angles
intérieurs du męme côté plus petits que deux droits, ces deux droites prolongées
indéfiniment, se rencontreront du côté oů les angles sont plus petits que deux droits. (cf fig
1).
(1) Chez Aristote, dans les livres de la Physique, on traite de l’infini : c’est une notion liée ŕ l’étude du mouvement.
" Le nombre est infini en puissance mais pas en acte"(207 b) : ce qui signifie que l’on ne peut pas parler de l’ensemble de tous les nombres mais quel que soit un nombre on peut en trouver un plus grand.
"il n’y a pas de grandeur sensible qui soit infinie, il ne peut y avoir de grandeur qui dépasse toute grandeur déterminée, car ce serait une chose plus grande que le ciel"(207 b)
Expliquons la figure : les droites (AC) et (BF) coupent une męme droite en faisant des angles,
CAB et FBA, dont la somme est inférieure ŕ 180 degrés. P5 nous dit alors que les droites
prolongées se couperont. Nous parlerons des droites un peu plus loin.
Dans les Eléments d’Euclide, on décide, au départ, de ne pas démontrer P5 mais on décide, aussi, de ne pas le poser comme axiome. C’est ce postulat que les mathématiciens vont essayer, réguličrement, de démontrer pendant 2000 ans ! soit en le remplaçant par un autre postulat, soit en le supprimant et en modifiant la définition du parallélisme soit en raisonnant par l’absurde, c’est-ŕ dire, en supposant que P5 est faux.
Ce postulat a posé un problčme dčs le départ.
On peut noter la formulation compliquée de ce postulat, formulation qui, d’aprčs certains, ressemblerait ŕ un théorčme !
C’est un résultat que l’on ne peut pas vérifier expérimentalement car il s’agit d’un passage ŕ la limite : plus la somme des angles se rapproche de 180 degrés et plus le point d’interchapter des droites "s’éloigne".
La composition męme du livre 1 nous interroge : Les vingt-huit premiers théorčmes ne l’utilisent pas. Et on va s’en servir pour démontrer les propriétés du parallélogramme ou du rectangle, propriétés qui nous semblent évidentes et si proches du monde réel tel qu’on le conçoit.
Enfin il y a toujours cette question ŕ laquelle il est difficile de répondre : qu’est-ce, exactement,
qu’un postulat ?
Mais le rôle du mathématicien est bien d’aller au de se poser toutes les questions et de ne pas se
laisser influencer par sa conception du monde physique. Son rôle, comme celui de l’artiste, est de
nous sortir du réel que nous croyons connaître pour nous faire rentrer par un autre chemin dans un
autre réel.
Il y a aussi des définitions : plus généralement qu’est-ce qu’une définition ? Il n’est pas facile de répondre ! Et pourtant c’est un problčme fondamental : quel sens pourrait-on donner ŕ une activité dont les objets d’étude ne seraient pas définis. C’est un problčme permanent dans toute activité. Parmi les définitions les sept premičres nous présentent les objets points, droites, surfaces planes. L’existence de ces objets est donnée ŕ priori. Ce sont des termes primitifs que l’on ne discutera pas. Ils gardent un contenu intuitif et sont définis en termes de réalités physiques mais en męme temps abstraits de la réalité physique.
Donnons un exemple : la premičre définition est "Le point est ce qui n’a pas de partie". Dans cette définition, le mot grec utilisé pour "point" est "sémaďon" qui signifie signe ou pointe du poinçon donc c’est une réalité physique que l’on peut diviser, découper... mais "est ce qui n’a pas de partie" nous fait sortir de cette réalité physique. On est dans le monde des idées. Mais on pourrait se demander aussi ce que signifie "partie"...
Les autres définitions sont celles d’objets qui reposent toujours sur notre intuition mais dont on va parfois démontrer l’existence. Par exemple, le triangle équilatéral est celui dont les côtés sont superposables : on en démontrera l’existence dans le théorčme 1 du livre 1.
La derničre définition est celle du parallélisme de deux droites.
Revenons sur la définition de la droite. La définition 2 nous dit qu’une ligne (donc une droite) "est ce qui a une longueur mais pas d’épaisseur".
Lŕ aussi, s’il est possible de dessiner une ligne qui a une longueur, il est impossible de dessiner une ligne qui n’a pas d’épaisseur. Dans ce sens tout dessin géométrique n’est que la représentation d’une idée abstraite.
La définition 3 nous dit que "les extrémités d’une ligne sont des points".
La définition 4 nous dit qu’une droite est "une ligne qui se couche de maničre égale entre ses points". En d’autres termes, par deux points d’une droite passe une droite et une seule.
Faisons plusieurs remarques :
1. Une ligne n’est pas un ensemble de points. Seules ses extrémités sont des points. Une ligne, pour les Grecs, ne peut pas ętre, comme on le dit aujourd’hui, un ensemble infini de points pour plusieurs raisons.
Tout d’abord, l’infini n’existe pas "en acte" pour les grecs, il est uniquement "potentiel" (cf Aristote : traité de physique) ce qui signifie, par exemple, que l’on ne peut pas parler de l’ensemble de tous les nombres męme si les grecs savent, naturellement, que quel que soit le nombre il en existe un plus grand. Pour la ligne c’est la męme chose : on pourra prendre autant de points que l’on veut sur une ligne mais on ne pourra pas parler de l’ensemble des points de la ligne.
Ensuite, pour arriver ŕ considérer qu’une ligne est un ensemble infini de points, en
mathématique, il faut maîtriser mathématiquement la notion d’infini et construire
l’ensemble des nombres que l’on appelle réels. Cela ne sera fait qu’ŕ la fin du XIXe
sičcle.
2. Une ligne, comme toute figure, est finie. Un objet non fini, dans le sens oů il n’aurait pas d’extrémités, serait non pas infini mais non défini, c’est ŕ dire non connu ; et on ne peut pas travailler sur un objet que l’on ne connaît pas !
Une derničre remarque sur les définitions : on a des définitions d’objets dont on démontrera l’existence (par exemple le triangle équilatéral) ou des définitions d’objets dont on admettra l’existence ŕ priori (par exemple la droite) ou encore des définitions de mots (comme parallčle). Il y a donc des niveaux différents dans ces définitions.
Un théorčme est un énoncé que l’on doit démontrer.
Dans le livre 1 il y a quarante huit théorčmes et on commence ŕ utiliser P5 ŕ partir du théorčme 29.
Euclide a donc démontré d’abord les théorčmes qui ne nécessitaient pas l’utilisation de P5. Il aurait pu procéder autrement. Une fois de plus P5 a un rôle particulier !
Cette construction résulte manifestement d’une réflexion autour de P5.
Dans les Eléments d’Euclide on ne parle pas de distance. Par exemple, une droite est plus petite qu’une autre si étant ajustée ŕ l’autre elle y est contenue. On ne parlera pas de sa longueur.
Il ne peut pas y avoir de distance : en effet, s’il y avait une notion de distance, on pourrait, dans l’espace, choisir un segment unité qui permettrait de mesurer n’importe quel segment.
Mais le carré qui aurait comme côté ce segment unité aurait une diagonale qui ne pourrait pas s’exprimer "rationnellement", c’est ŕ dire qui ne serait pas un fraction de deux nombres entiers. Donc, ne pouvant pas associer ŕ la diagonale de ce carré un nombre celle-ci n’aurait pas de longueur ! Et les Grecs avant Euclide connaissaient ce résultat.
Euclide surmonte ce problčme en définissant la notion de "commensurabilité" ou
d’"incommensurabilité", ce qui n’est pas facile mais efficace car il peut démontrer plein de
résultats, en particulier, dans le livre 13 il démontre l’existence des cinq solides réguliers (1)(cf
Timée de Platon).
(1) Voici les cinq solides réguliers de Platon : tétračdre( quatre faces équilatérales), cube( six faces carrées),
octačdre(huit faces équilatérales), dodécačdre(douze faces pentagonales réguličres), icosačdre(vingt faces
équilatérales).
L’objectif d’Euclide va ętre de démontrer ses théorčmes seulement ŕ partir de ses définitions, demandes et axiomes.
Cependant les figures qui accompagnent les démonstrations vont parfois servir d’arguments de
démonstration. Par exemple, dans la démonstration du théorčme 17 du livre III, il admet
qu’une droite joignant deux points, l’un ŕ l’intérieur d’un cercle et l’autre ŕ l’extérieur,
coupe le cercle, simplement par l’observation de la figure. On est loin des exigences de
Platon ou d’Aristote qui ont la volonté de ne jamais rien admettre sans démonstration.
Il est étonnant de voir que cette exigence va s’estomper au cours des sičcles et que
l’on va considérer qu’il y a une parfaite harmonie entre les objets géométriques et
leurs images visibles ou proclamer la "vérité évidente" des axiomes de la géométrie.
Mais les figures peuvent parfois n’ętre que l’illustration d’une idée. Par exemple dans le livre V
on démontre des théorčmes sur les relations entre les grandeurs. Ces grandeurs sont toujours
représentées par des droites et les démonstrations apparaissent en premičre lecture comme des
exercices de géométrie sur des droites et pourtant dans le livre VI dans la démonstration du
théorčme 2 (Thalčs) on utilise un théorčme du livre V et cette fois les grandeurs
seront des triangles. Ces figures géométriques ne sont donc parfois que la représentation
d’idées.
Les Eléments d’Euclide présentent des insuffisances, mais l’ensemble est tellement fort que l’on peut comprendre pourquoi pendant deux mille ans ils ont été la référence incontournable des mathématiciens et du raisonnement en général.
Et ce n’est pas un hasard si encore aujourd’hui, ils sont aussi étudiés.
Une remarque pour terminer : on ne trouve pas une fois le mot géométrie dans les élément d’Euclide ! En fait un géomčtre n’est pas dans l’Antiquité un mathématicien. Il est celui qui fait des relevés de terrain : c’est un technicien. Il n’est pas dans le monde des idées.
« M. Fourier avait l’opinion que le but principal des mathématiques était l’utilité publique et l’explication des phénomčnes naturels ; mais un philosophe comme lui aurait dű savoir que le but unique de la science, c’est l’honneur de l’esprit humain, et que sous ce titre, une question de nombres vaut autant qu’une question du systčme du monde. »
C.Jacobi (mathématicien allemand) dans une Lettre ŕ Legendre, 1830.
Les mathématiques se développent ŕ la fois indépendamment des autres savoirs et en liaison
avec eux. On parle souvent de mathématiques fondamentales et de mathématiques appliquées
comme étant opposées mais cette distinction est une erreur car ce sont toujours des
mathématiques (1). On peut simplement dire que des théories mathématiques ont été créées
ŕ partir de problčmes du quotidien tels que, le dénombrement d’une population, l’écoulement
d’un fluide ou les flux financiers, etc... ou d’autres théories telles que les probabilités de Pascal, le
calcul différentiel de Leibniz, la théorie des ensembles ou encore... les géométries non
euclidiennes qui auront été créées uniquement grâce ŕ la curiosité ou pour l’honneur de
l’esprit humain.
Aristote n’a pas écrit de traité de mathématiques mais il en parle un peu...partout ! et en particulier de leur rapport avec la physique.
Par exemple dans Physique II 193b-194a Aristote montre le lien et les différences entre
la physique et les mathématiques : "...appartiennent aux corps physiques les surfaces,
solides, grandeurs et points qui sont l’objet des études mathématiques" et plus loin "il
appartient au physicien de connaître l’essence du soleil et de la lune mais aussi de leurs
attributs essentiels...attributs objets d’étude des mathématiciens". Plus loin encore "la
géométrie étudie la ligne physique en tant qu’elle n’est pas physique ; au contraire l’optique
étudie la ligne mathématique, non pas en tant que mathématique, mais en tant que
physique".
Dans Métaphysique I, 989 b, Aristote affirme, dans sa critique des pythagoriciens, que "les ętres mathématiques sont privés de mouvement, ŕ l’exception de ceux dont traite l’Astronomie." Donc, pour lui, la géométrie est une science qui porte sur des objets qui échappent au mouvement alors que la physique a pour objet l’étude du mouvement.
Si la physique et les mathématiques peuvent s’apporter des informations, en aucun cas les
mathématiques ne permettront d’expliquer les phénomčnes naturels.
Pour Aristote les mathématiques ne peuvent donc pas ętre utilisées pour comprendre le réel : par exemple la sphčre mathématique n’existe pas physiquement, c’est une idée. Galilée (1) va lui répondre que, si la sphčre n’existe pas, tout caillou a une forme géométrique, peut ętre unique mais géométrique quand męme.
Galilée arrive au moment oů la physique d’Aristote est de moins en moins satisfaisante : les
observations astronomiques sont de plus en plus précises, l’explication du mouvement des plančtes
devient de plus en plus compliquée et Copernic montre que l’héliocentrisme répond mieux au
mouvement des astres. De plus on est toujours incapable de comprendre le mouvement d’un objet
qu’on lance : comment expliquer ce le mouvement de la pierre au moment oů elle sort de la main ?
Galilée va affirmer que pour comprendre la nature il faut suivre "le chemin de la simplicité". La
physique d’Aristote est trop compliquée. Et le chemin de la simplicité passe par la
géométrisation du monde physique et en l’idéalisant il va créer la physique moderne. Newton
poursuivra dans cette voie et expliquera pourquoi, par exemple, la lune tourne autour de la
terre.
Aujourd’hui il est évident que la technologie utilise les théories mathématiques les plus
abstraites, en particulier la numérisation des phénomčnes physiques. Mais il faut avoir en
permanence ŕ l’esprit qu’un modčle mathématique appliqué ŕ une réalité est une
idéalisation de cette réalité et donc n’en est qu’une approximation. Et l’oublier peut conduire ŕ
un...crash boursier.
Rajoutons que la géométrie, euclidienne ou non, a un lien avec la réalité, avec l’espace réel . C’est cette position que soutient Einstein (1) dans "géométrie pure" et "géométrie appliquée". Pour lui, ŕ l’origine, on a fait de la géométrie pour décrire le comportement des phénomčnes physiques ; c’est bien ce ŕ quoi elle sert chez Newton. Ainsi, chez ce dernier, notre espace ou les objets dans l’espace réel, obéissent réellement aux lois de la géométrie euclidienne.
Certains, au XIXe, se sont męme demandés si la géométrie faisait partie des mathématiques, si
elle n’était pas qu’une théorie physique, qu’un outil ou encore l’expression de la théorie de
Newton. Mais alors, si le postulat V d’Euclide n’est pas démontrable, si ce n’est qu’une hypothčse,
les lois de Newton ne pourraient ętre, peut-ętre, que des hypothčses, ce qu’au XIXčme on refuse.
Et c’est Hilbert qui, en 1899, dans son livre, "Fondements de la géométrie", démontrera que la
géométrie, qu’elle soit euclidienne ou non, est bien une activité mathématique comme une
autre.
Les mathématiques sont liées aux autres savoirs et c’est pour cela qu’elles se développent mais c’est aussi pour cela que leur développement peut ętre freiné ! Nous le verrons ! Ce que l’on peut affirmer, de toute façon, c’est que les mathématiques se développent d’autant plus que les autres savoirs s’enrichissent.
Aujourd’hui on continue ŕ étudier le lien des mathématiques avec les autres disciplines, mais plus seulement la physique : l’économie, la biologie, etc...Pour résumer, on pourrait dire que le mathématicien a les pieds dans la terre et la tęte dans les étoiles...
Plusieurs types d’activités auraient pu contribuer ŕ la mise en place des géométries non euclidiennes : la philosophie, la géographie, l’astronomie et certaines activités artistiques telles la peinture, l’architecture ou la musique.
Rappelons que "Géographie", signifie étymologiquement dessin ou écriture de la terre et "géométrie" mesure de la terre. Les Grecs savent que la Terre est ronde et Eratostčne (1) mesure son rayon. Celui-ci va poser le problčme de la cartographie : est-il possible de trouver une méthode capable de représenter une portion de sphčre sur une surface plane, méthode qui respecterait les dimensions réelles ? Les Grecs ne résoudront pas ce problčme (2) mais ils ont bien conscience que lorsqu’ils tracent une ligne sur le sol ce n’est jamais une droite ! D’ailleurs dans les Eléments d’Euclide on parle d’angle curviligne.
Examinons un peu la géométrie sur la sphčre.
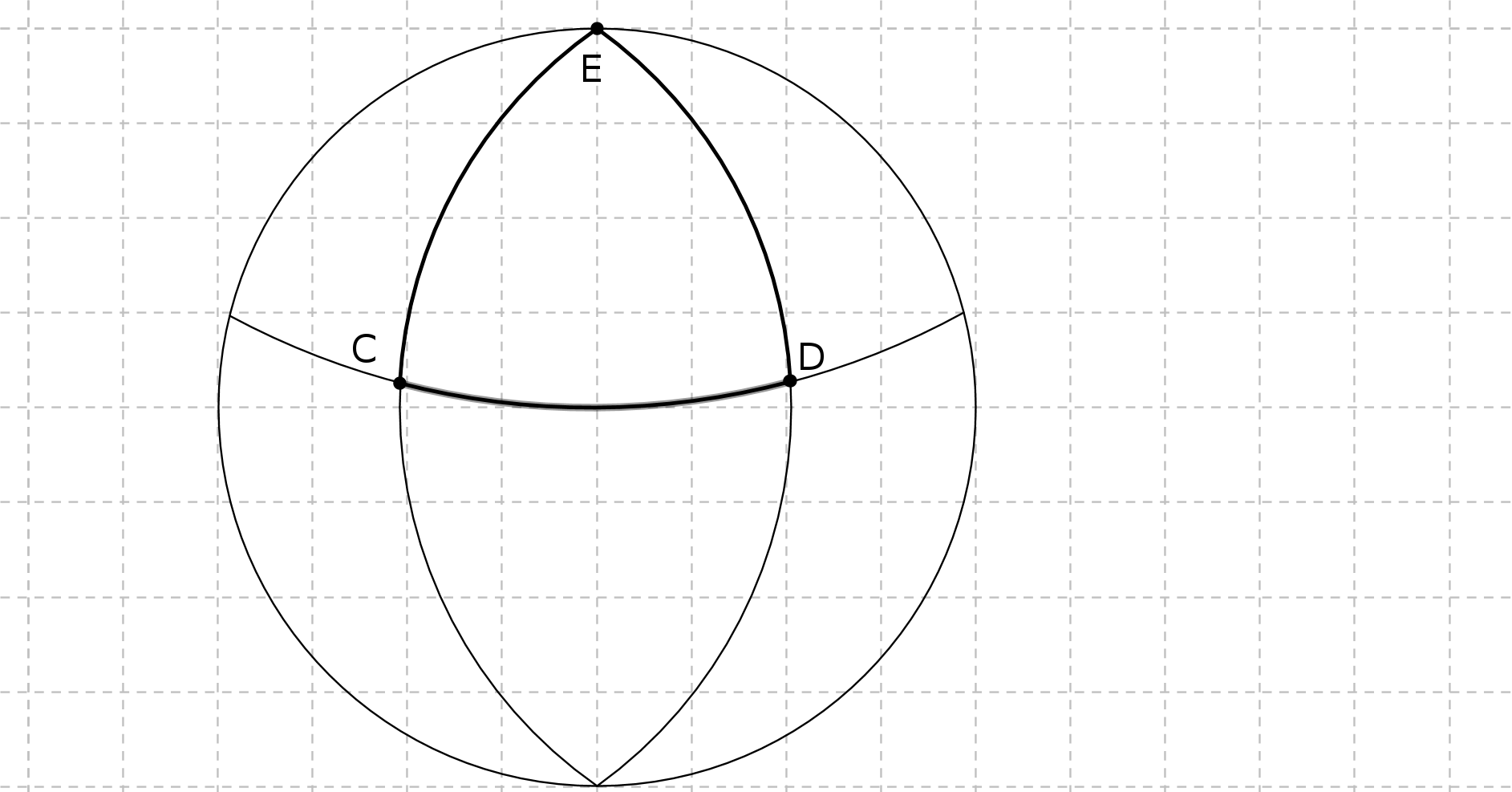
Si on trace deux cercles passant par les deux pôles de la terre et la ligne de l’équateur,
ces lignes définissent un triangle curviligne (cf figure 2) dont les angles ŕ la base sont
égaux ŕ 90 degrés donc la somme des trois angles de ce triangle est supérieure ŕ 180
degrés ! Donc on n’est plus dans le cadre de la géométrie euclidienne : travailler sur une
sphčre conduit ŕ d’autres conclusions. L’espace dans lequel on travaille joue un rôle
fondamental.
fig2 : les méridiens EC et ED sont perpendiculaires entre eux et ŕ l’équateur CD
Cependant il y a des analogies entre la géométrie du plan et la géométrie d’une sphčre. L’un des éléments essentiels des figures de la géométrie est la ligne appelée droite qui est caractérisée par le fait qu’elle est déterminée par deux quelconques de ses points, ce qui une conséquence ŕ la fois de la quatričme définition et du sixičme postulat du premier livre des Eléments d’Euclide.
Sur une sphčre de rayon R, si on prend deux points, il passe un cercle de rayon R qu’on appellera géodésique (1) ou grand cercle. Chaque grand cercle est déterminé par deux quelconques de ses points. Un grand cercle est l’équivalent sur la sphčre de la ligne droite sur le plan. On peut alors construire les figures équivalentes ŕ celle de la géométrie plane : triangles, quadrilatčres, cercles, angles, etc.... Il suffit de remplacer dans les définitions du plan droite par grand cercle.
Mais l’analogie entre plan et sphčre n’est pas complčte ! Tout d’abord il n’existe pas de grands
cercles parallčles au sens d’Euclide, c’est ŕ dire sans points communs et ensuite, si par deux points
non diamétralement opposés il existe un seul grand cercle, par deux points diamétralement
opposés il passe une infinité de grands cercles. Alors que, dans le plan, par deux points distincts
passe une droite et une seule.
On peut noter que Théodose (IIe et Ier sičcle av.J.C) et Menelaus(Ier sičcle) ont créé une géométrie sphérique que Ptolémée (IIe sičcle) va utiliser en astronomie. Puis les mathématiciens arabes vont développer ces travaux, en particulier, Al Khwarismi (XIe).
Ainsi faire de la géométrie sur une surface non plane aurait pu conduire ŕ créer une autre géométrie. C’est cela que va faire Riemann ŕ la fin du XIXe et créer ainsi une géométrie non euclidienne.(cf au chapitre suivant pour le travail que l’on peut faire sur la sphčre)
Le problčme est de représenter un objet de l’espace dans le plan tel qu’il est ou tel qu’on le voit : comment donner l’impression de profondeur ? Si l’on se met ŕ une fenętre comment représenter sur une toile exactement ce que l’on voit ? Quand on est au milieu d’une route dont les bords sont parallčles et que l’on regarde le "bout" de la route on a l’impression que les bords se rejoignent.
Notons ABCD, le plan représentant la route, et EFGH le plan perpendiculaire passant par (EF) représentant la toile sur laquelle on veut représenter la route. L’oeil du peintre est en O. (figure ci-dessous).
Pour décrire cette situation on invente ce que l’on appelle un point de fuite .
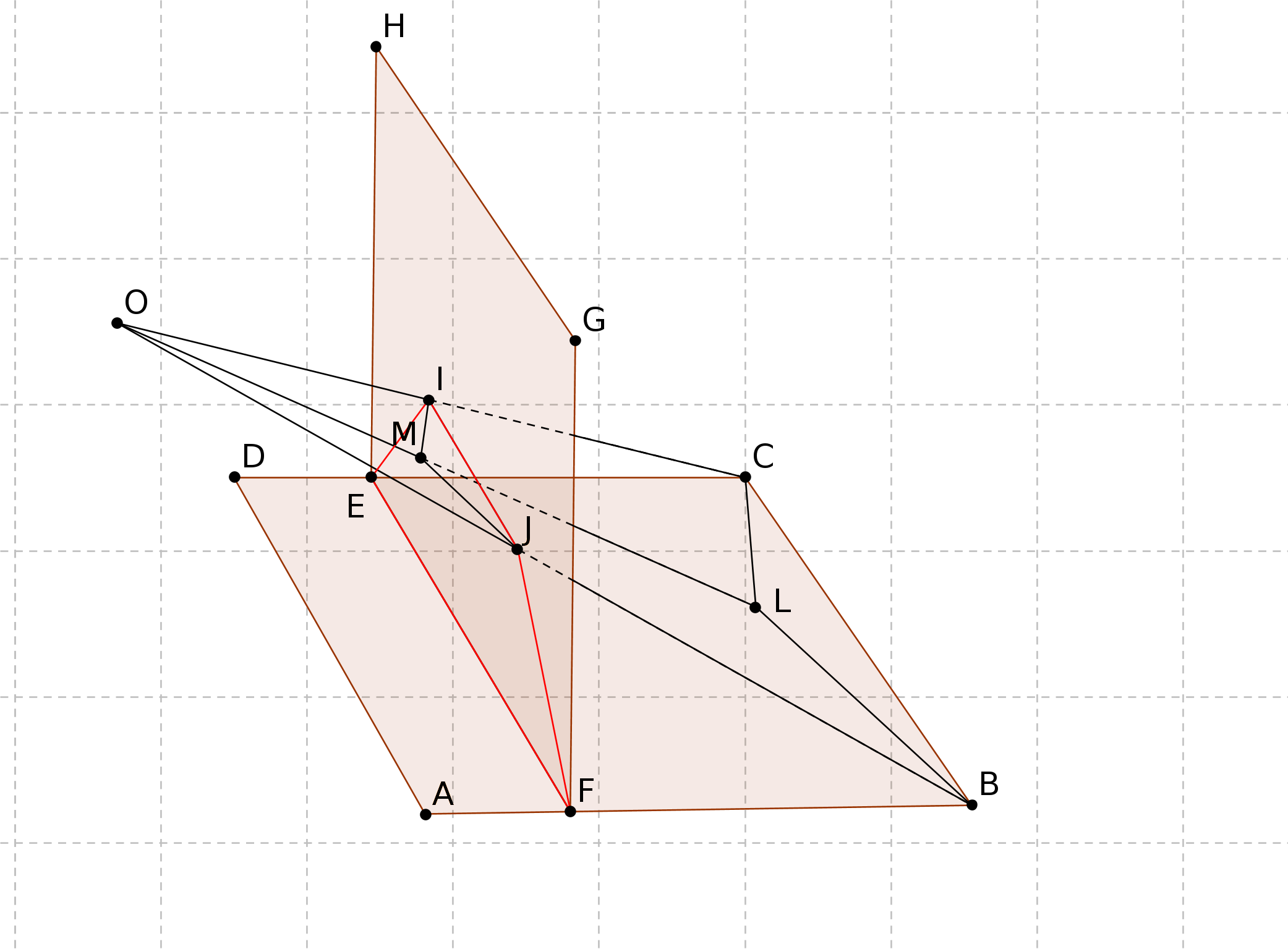
Chaque fois que l’on regarde un point L de la route ŕ partir de O, cela correspond au rayon lumineux OL qui coupera la toile en un certain point M. On dira que M est l’image de L sur la toile T.
Ainsi B aura pour image J et F aura pour image lui-męme.
Toute droite joignant O ŕ un point du segment [BF], bord de la route, coupera T en un point de [JF] et toute droite joignant O ŕ un point du segment [CE] coupera T en un point de [EI]. Ainsi [BF] a pour image [JF] et [CE] a pour image [EI].
La portion de route EFBC sera donc représentée par le trapčze EFJI. C’est ainsi que le peintre verra la portion de route EFBC.
[JF] et [EI] se coupent en un point K. En fait si on regarde le bord FB, plus B s’éloigne de F et plus J se rapproche de K. De męme, si on regarde le bord EC plus C s’éloigne de E et plus I se rapproche de K. Ainsi si je regarde "ŕ l’infini", cela correspond ŕ une droite horizontale partant de O et passant par K.
On dira que K est l’image du point ŕ l’infini des deux bords de la route que l’on voit se rejoindre, comme si deux droites parallčles se coupaient ŕ l’infini. Effectivement, c’est ce que l’on voit.
Si, maintenant, je dessine un rectangle sur ma toile que représente-t-il dans la réalité ? Il représentera une route dont les bords s’écartent. C’est ainsi que les canaux de Versailles ont été dessinés de maničre que le roi voit, du château, les bords du canal central parallčles...
Mais que peut-on dire de ce point ŕ l’infini ? Tout point sur notre tableau correspond ŕ un point de la réalité, mais alors le point K est l’image d’un point qui existerait dans la réalité celui qui serait l’interchapter des deux droites... parallčles. Ceci contredit notre bonne géométrie euclidienne. Donc ce n’est qu’une vue de l’esprit mais l’existence de droites qui ne se coupent jamais, n’est-ce pas aussi une vue de l’esprit ? Personne n’est allé voir ŕ l’infini ce qui se passait ! Plus sérieusement, une fois de plus, apparaît la notion de limite, d’infini. le point K est une limite. Plus on regarde au loin sur la route et plus on se rapproche de ce point sur la toile.
Dans la vie courante si on regarde une table carrée, on ne la voit pas carrée : on la voit comme un parallélogramme déformé. Pour la voir carrée il faut la voir de dessus, ce qui n’arrive pas souvent... Les peintres de la Renaissance ont voulu peindre exactement ce qu’ils voyaient et on a inventé les rčgles de la perspective que l’on doit ŕ des hommes comme Cavaliéri ou l’architecte Desargues.
A partir du moment on a pris conscience, ŕ la Renaissance, que l’on pouvait représenter la réalité en utilisant plusieurs modčles géométriques n’aurait-t-on pas pu se demander si la géométrie euclidienne était la seule représentation de la réalité ?
La source du cheminement qui a conduit aux GNE est ŕ chercher dans Aristote męme donc avant męme Euclide. Un écrit d’Aristote qui ne nous est pas parvenu mais qui est cité par les mathématiciens arabes énonce quelques principes que l’on doit respecter (1).
Aristote reprochait ŕ certains de tourner en rond et donc il fallait poser comme postulat voire comme axiome un principe permettant de construire la géométrie. Ainsi P5 n’est pas né du hasard mais de plus de cinquante ans de travaux et la forme compliquée de P5 n’est sans doute que le résultat de cette recherche.
Dans les Seconds analytiques Aristote pose la question : "laquelle des deux propositions opposées concernant la somme des angles du triangle est vraie ? La somme est-elle 180 degrés ou non ?". La question reste sans réponse et pour Imre Toth (2) Aristote n’indique pas sa préférence. Dans l’Ethique ŕ Eudčme ou dans la Grande Morale pour éclaircir le concept de liberté Aristote fait le parallčle avec la géométrie.
L’action éthico-politique (sans intervention extérieure) est précédée par une décision initiale de l’ętre humain : il se voit placé devant l’alternative : une voie qui l’amčne au bien et une voie qui l’amčne au mal. Aucun raisonnement démonstratif ne peut fonder ce choix. Cette décision premičre et libre est le principe de l’action éthique comme l’axiome est placé au début d’une théorie géométrique. La liberté dans le domaine de l’éthique correspond ŕ l’indémontrabilité ou ŕ l’indécidabilité de l’axiome en géométrie.
Les propositions géométriques citées comme axiomes opposés sont justement sont justement "la somme des angles est 180 degrés" et "la somme des angles n’est pas égale ŕ 180 degrés . Pourra-t-on avoir la liberté de choisir entre deux théories géométriques qui s’opposent ? Aristote ne le dit pas explicitement mais manifestement la question est posée. En tous cas il refuse d’exclure ŕ priori l’axiome non euclidien !. Si Aristote a en tęte ce problčme il surpasse tous ceux qui vont lui succéder et essayer de démontrer P5.
Ainsi, soit on peut démontrer P5, soit on ne peut pas. Et si on ne peut pas, P5 devient un axiome et s’il devient un axiome on peut alors essayer de construire une géométrie reposant, entre autres, sur la négation de P5. C’est cela que l’on refusera de faire jusqu’au XIXe !
De nombreux savants ont essayé de démontrer P5 qui, en plus de ce que l’on a dit plus haut, a plus
l’air d’un théorčme qu’autre chose. D’autre part les quatre premiers postulats peuvent se voir sur
une figure, pas le cinquičme ! Reprenons P5 : Plus la somme des angles intérieurs est voisine de
deux droits, plus le point d’interchapter sera éloigné et sortira de la feuille sur laquelle on dessine
notre figure. La forme donnée par Euclide ŕ son cinquičme postulat dissimule un “passage ŕ la
limite” , l’un des premiers de l’histoire , outil fondamental que les mathématiciens ont mis des
sičcles ŕ maîtriser.
Les mathématiciens qui se sont intéressés aux questions qui entourent P5 vont prendre dans le livre 1 des Eléments d’Euclide les définitions (en modifiant parfois la définition du parallélisme), les postulats autres que P5, les axiomes et les vingt-huit premiers théorčmes qui ne dépendent pas de P5.
L’ensemble de ces objets sera appelé géométrie neutre.
Puis les mathématiciens vont essayer de démontrer P5 en rajoutant, ou en enlevant quelquechose.
Quand on réfléchit au problčme, de maničre approfondie, que l’on prend une feuille et un crayon, on s’aperçoit que l’on tombe toujours sur les męmes questions :
Quelle est la somme des angles d’un triangle ? ou alors
Existe-t-il une seule parallčle passant par un point donné ŕ une droite donnée ? ou alors
si un quadrilatčre a trois angles droits le quatričme angle l’est-il aussi ? ou encore
si dans un quadrilatčre il y a deux angles consécutifs droits et deux côtés opposés de
męme longueur le quadrilatčre est-il un rectangle ?
Ainsi ceux qui ont réfléchi sur P5 ont toujours tourné autour des męmes questions. Mais, quelle que soit la qualité de leur réflexion, ils auront échoué dans leurs tentatives. Voyons quelques exemples.
Ses travaux nous sont relatés par Proclos (Ve aprčs J.C). Rappelons que pour Euclide deux droites parallčles sont deux droites qui, prolongées ŕ l’infini, ne se coupent pas. Posidonius a remplacé cette définition par :
"Deux droites sont parallčles lorsque, prolongées indéfiniment, elles sont équidistantes."
A premičre vue il n’y a pas de grande différence et cette définition peut nous sembler évidente.
Puis Posidonius pose et démontre, comme théorčme, le postulat 5. Mais il commet une
erreur.
Il pense que sa définition du parallélisme est équivalente ŕ celle d’Euclide. Mais ceci est
faux.
Tout d’abord il faut éclaircir cette notion d’équidistance, donc de distance, sachant que les
nombres irrationnels n’existent pas donc que l’on ne peut pas parler de longueur. On le fera au
chapitre suivant.
Mais prenons la définition de Posidonius telle quelle.
Cette définition implique que, si deux droites continűment prolongées sont équidistantes,
alors elles ne se coupent pas (puisqu’elles ne seront jamais séparées par une distance nulle). Donc
elles sont parallčles au sens d’Euclide.
Mais la réciproque n’est pas évidente : si deux droites ne se coupent pas męme prolongées indéfiniment, elles sont parallčles au sens d’Euclide mais sont elles parallčles au sens de Posidonius, c’est-ŕ dire sont-elles équidistantes ?
Prenons deux droites parallčles AB et CD au sens d’Euclide. On trace les perpendiculaires ŕ CD passant par A et B. On obtient la figure suivante :
On peut démontrer que ABFE est un parallélogramme. Pour démontrer que AE=BF il faut
démontrer que dans un parallélogramme les côtés opposés ont męme longueur. Or ce
théorčme se montre ŕ partir du théočme 34 du livre 1 d’Euclide, théorčme qui repose ... sur
P5. Donc la définition de Posidonius repose sur P5.
Ainsi Posidonius ne démontre pas P5.
On voit lŕ la difficulté qu’ont eu les mathématiciens (qui étaient pourtant trčs bons) de sortir de l’"évidence".
Remarque : on voit apparaître ci-dessus qu’un questionnement autour de P5 est lié ŕ un questionnement sur le parallélogramme ou le rectangle.
Proclus critique Posidonius et propose la démarche suivante : il veut d’abord démontrer que si une droite coupe une autre droite elle coupera aussi toutes les parallčles ŕ cette droite.
Pour démontrer cela il considčre deux droites parallčles (AB) et (CD) et une droite (BE) tel que E et (CD) sont situés du męme côté de (AB) et on considčre la distance EH de E ŕ (AB). La droite (BE) pouvant se prolonger (postulat 1 d’Euclide) autant qu’on veut la distance EH viendra plus grande que la distance des deux parallčles donc (BE) coupera (CD).

Mais une fois encore, cela revient ŕ considérer que deux droites parallčles sont équidistantes,
résultat qui est une conséquence de P5.
Avant les mathématiciens arabes d’autres philosophes se sont intéressés au problčme. On peut citer l’astronome Ptolémée (IIIeme sičcle) ou Simplicius.
Nous parlerons de Al Jawhari (Xe),Thabit b. Qurra(Xe), Ibn al-Haytam(XIe), Al Khayyam(XIe).
Répétons que lorsque l’on essaie de se remettre dans les męmes conditions que ceux qui ont essayé de démontrer P5, on s’aperçoit que, assez rapidement, on est amené ŕ se poser les męmes questions, ŕ tourner autour de la somme des angles d’un triangle, ŕ introduire un quadrilatčre dont trois angles sont droits, ŕ étudier le lien entre droites parallčles et équidistance, etc...
Al Jawhari affirme que, par un point quelconque situé ŕ l’intérieur d’un angle, il est possible de
tracer une ligne coupant ses deux côtés.
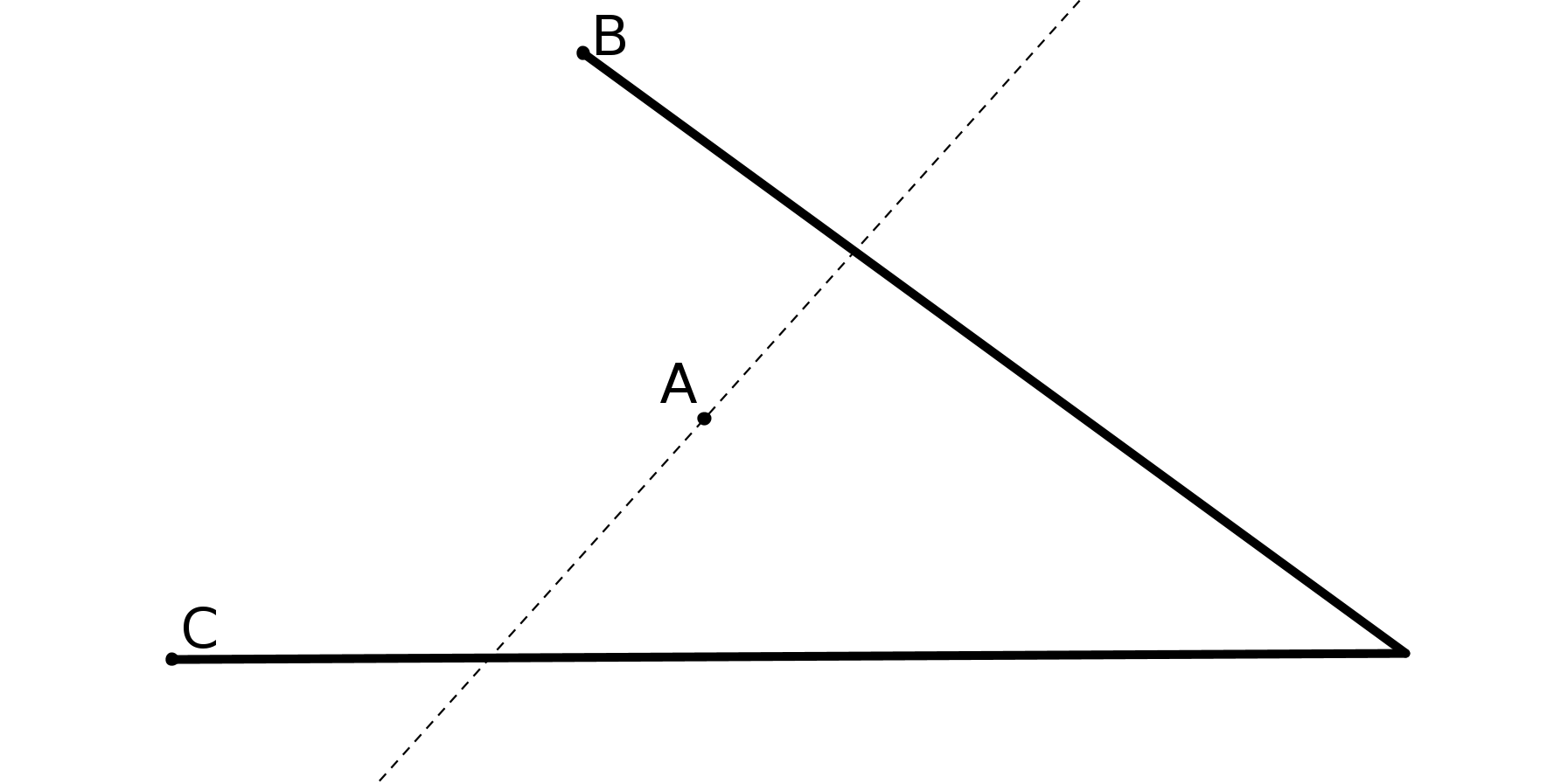
Puis il se propose de démontrer P5. Cet énoncé qui a l’air bien loin de P5 en est une conséquence. On peut prouver que les deux énoncés sont équivalents. (cf ŕ la démonstration dans le chapitre suivant). Donc prendre comme postulat l’énoncé de Al Jawhari revient ŕ prendre P5.
Donc P5 n’est pas toujours démontré et ŕ quel point il a été, une fois de plus, difficile de s’abstraire de l’évidence.
Thabit b. Qurra propose deux démonstrations :
la premičre repose sur le principe suivant : si deux droites coupées par une troisičme se rapprochent ou s’éloignent l’une de l’autre quand on les trace dans une direction, elles s’éloignent ou se rapprochent quand on les trace dans l’autre direction. Mais une fois de plus cet énoncé est équivalent ŕ P5 : en effet c’est P5 exprimé autrement !
Il est ŕ noter que Lobatchevski dans sa GNE oů tous les axiomes euclidiens sont vérifiés sauf P5 il existe des lignes droites qui s’écartent l’une de l’autre dans chacune des directions ŕ partir de leur perpendiculaire commune.
La deuxičme démonstration repose sur l’hypothčse suivante : si on déplace une droite D perpendiculaire ŕ une droite donnée chaque point de D décrira une droite équidistante ŕ la droite donnée.
Cette hypothčse n’est en fait vraie que dans la géométrie euclidienne ! b.Qurra déduira de ce principe la construction d’un rectangle qui est celui décrit plus haut puis démontrera P5. Mais de nouveau cet énoncé sera équivalent ŕ P5. De plus l’hypothčse dont il part implique la création d’une distance. Ce qui , une fois de plus, est impossible.
La démarche de Qurra sera critiquée, en particulier par Al-Khayam.
En effet b.Qurra utilise la notion de mouvement : il affirme qu’un point se déplaçant crée une ligne ce qui pour Al-Khayam se référant ŕ Aristote était un non sens.
En effet pour ce dernier la connaissance d’un objet géométrique repose sur sa connaissance dans notre espace ŕ trois dimensions. Ainsi on doit partir du solide sensible puis passer au solide géométrique, abstrait des sensations qui lui sont liés, (premier degré d’abstraction) puis,
une surface faisant partie d’un solide, si on la sépare du solide on aboutit ŕ un deuxičme niveau d’abstraction. Une ligne est sur une surface et si on l’enlčve de la surface on a un troisičme niveau d’abstraction.
Quant au point il est sur une ligne et si on le retire de la ligne on passe ŕ un quatričme niveau d’abstraction.
En résumé, une surface ne peut pas engendrer un solide puisque c’est le solide qui crée la
surface, une ligne ne peut pas créer une surface puisque c’est la surface qui crée la ligne, un point
ne peut pas engendrer une ligne puisque c’est la ligne qui le crée. Donc l’approche de Qurra sera
considérée, par Al Kahiam comme fausse.
Pour Aristote seuls les corps réels du monde sensible sont soumis au mouvement donc les objets géométriques qui sont des abstractions, non. Et Euclide a cherché ŕ éviter le plus possible les mouvements de figures. Cependant l’axiome 8 qui affirme que deux figures qui s’ajustent sont égales et comment fait-on pour ajuster deux figures sans déplacement ? Ce problčme divisera les savants pendant de nombreux sičcles !
Cette objection de Al Kahiam est intéressante parce qu’elle prouve qu’il y a eu une réflexion sur
ce qu’est l’espace géométrique. Cet espace mathématique n’est en aucun cas l’espace physique.
Mais cette réflexion ne va pas suffisamment loin, puisque malgré tout cet espace géométrique
dérive de l’image que l’on a de l’espace physique. Tant que l’on ne dépassera pas cette conception
on sera bloqué.
Cette idée de rectangle sera réutilisée par Ibn al-Haytam : il introduit un quadrilatčre qui a trois angles droits. Pour lui le quatričme angle sera soit obtus, soit aigu, soit droit. Il réfute les deux premičres possibilités, affirme que l’angle est droit et démontre P5. Mais réfuter les deux premičres possibilités revient ŕ admettre P5. Une fois de plus Ibn al-Haytam n’y arrive pas.
Il est ŕ noter que ce rectangle va ętre utilisé par le mathématicien Lambert au XVIIIe pour tenter de démontrer P5.
On peut noter que les deux premičres possibilités pour le quatričme angle correspondront respectivement aux géométries hyperboliques et elliptiques premičres géométries non euclidiennes du XIXe !
Celui-ci affirme que ses prédécesseurs se sont trompés parce qu’ils n’ont pas tenu compte des principes qu’Aristote auraient énoncés dans un ouvrage qui ne nous est pas parvenu.
Al Khayyam énonce le quatričme de ces principes qu’il va utiliser : deux lignes droites convergentes se coupent et il est impossible ŕ deux droites convergentes de diverger dans la direction dans laquelle elles convergent.
Al Khayyam va donc utiliser ce principe. Puis, lui aussi, considčre un rectangle dans lequel il y a deux angles droits et deux côtés latéraux égaux et se demande comment sont les deux autres angles. A l’aide de ce principe il démontre que les deux angles qui restent sont droits puis prouve P5. Mais pour démontrer cela non seulement il utilise ce principe d’Aristote mais aussi un théorčme qui...résulte de P5 ! Donc une fois de plus P5 n’est pas démontré. (cf chapitre suivant pour le détail de la démonstration ) Mais ce travail n’est pas inutile : il sera poursuivi par le jésuite Saccheri au XVIIIe .
D’autres mathématiciens arabes travailleront sur le sujet mais tous ont en tęte une seule géométrie possible : l’euclidienne. Aucun ne franchira le pas fait au XIXe et pourtant ce sont tous des esprits puissants, des chercheurs qui ont la force de sortir de leurs certitudes.
Et pour y arriver il faudra remettre en cause les évidences du type : deux droites parallčles sont
équidistantes, dans un quadrilatčre qui possčde déjŕ trois angles droits le quatričme l’est
aussi, par un point pris dans un triangle on peut tracer une droite coupant deux côtés du triangle,
etc...
En fait, pour sortir de la géométrie euclidienne, il faut admettre que l’univers, dans lequel
on vit, peut ętre décrit avec d’autres modčles que ceux que nous connaissons. Si on
considčre que nous avons une connaissance totale de l’univers toute autre approche devra
ętre fausse. C’est pour cela que l’on va essayer de démontrer pendant des sičcles et des
sičcles qu’il n’y a qu’une seule géométrie de vraie et que ne pas y arriver est un échec
important.
Il faut cependant souligner que ces tentatives de démonstration de P5, męme si elles sont des échecs, préparent les travaux de Gauss, Bolyai ou Lobatchevski. Il s’agit d’un long cheminement et ces recherchent permettent de mettre en évidence des manques, des insuffisances (par exemple : problčme de la mesure d’une longueur) et de poser de nouvelles questions.
Nous parlerons de Wallis(1616-1703), Saccheri(1667-1733), Lambert(1728-1777) et Legendre (1762-1833).
Wallis, en plus de ses activités mathématiques (ceux qui ont fait un peu de maths ont entendu
l’expression "intégrales de Wallis), est l’auteur du premier traité de phonétique de la langue
anglaise, en introduction ŕ sa Grammatica Linguae Anglicanae. Il est également connu comme
précurseur de l’éducation des sourds-muets.
Le postulat 3 d’Euclide demande ŕ ce que l’on puisse construire un cercle. On peut remarquer que tous les cercles sont semblables, c’est ŕ dire que l’on passe de l’un ŕ l’autre par un déplacement ou un agrandissement ou une réduction, Wallis va avoir l’idée de remplacer P5 par le postulat : sur une droite donnée il est possible de construire un triangle semblable ŕ un triangle donné(c’est ŕ dire un triangle qui aura les męmes angles que le triangle donné). On passera d’un triangle semblable ŕ un autre, comme pour les cercles, par un agrandissement ou une réduction.
Ceci semble tellement évident que personne ne se rendit compte que le postulat de Wallis se déduit de P5.
En effet cela revient ŕ supposer que la somme des angles dans un triangle est égale ŕ deux droits donc ŕ supposer P5 vrai ! donc on n’avance pas ! Plus précisément la similitude des triangles est traitée dans le livre 6 d’Euclide. L’existence des triangles semblables repose sur des théorčmes qui utilisent P5.
Il est cependant étonnant que Wallis, qui était un trčs bon mathématicien et qui connaissait sans doute trčs bien les Eléments d’Euclide ne s’en soit pas rendu compte... sauf si, comme beaucoup d’autres, il pensait que l’évidence était une vérité.
Saccheri utilise le męme quadrilatčre que Al Khayyam : il prend donc un quadrilatčre ABDC dans lequel les angles A et B sont droits et les côtés AC et BD sont égaux.
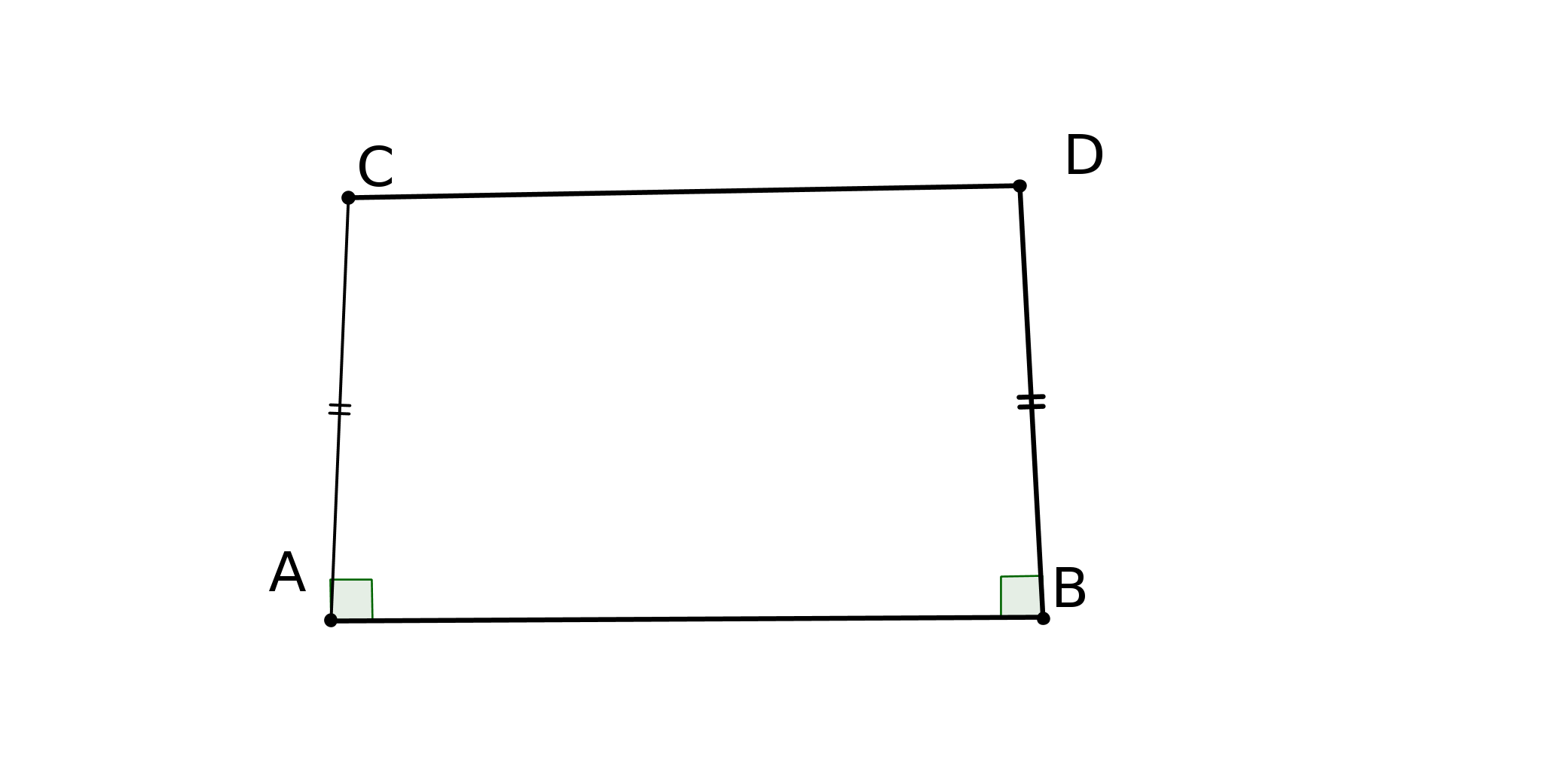
Naturellement, pour quelqu’un qui n’a en tęte que la géométrie euclidienne ce quadrilatčre est un rectangle...
Saccheri fait alors les trois hypothčses suivantes :
H1 : les angles C et D sont droits,
H2 : ils sont obtus,
H3 : ils sont aigus.
Il démontre alors que si l’une des trois hypothčses est vraie dans un quadrilatčre alors elle est
vraie dans tous les autres quadrilatčres puis il démontre que la somme des angles dans un triangle
est
sous H1, égale ŕ deux angles droits,
sous H2, supérieure ŕ deux angles droits,
sous H3, inférieure ŕ deux angles droits.
Pour démontrer P5, il considčre la figure suivante, dans laquelle AP et PB sont perpendiculaires et l’angle fait par AP et AD est aigu.
Il se place dans chacune des hypothčses H1, H2 et H3 et essaie de démontrer P5.
Sous H1 (les angles C et D sont droits) il démontre que AD coupera PB donc P5.(Voir dans le
chapitre suivant une démonstration).
Sous H2 (les angles C et D sont obtus) il démontre aussi que AD coupera BP et donc
P5 et comme P5 implique que la somme des angles dans un triangle est égale ŕ 180
degrés il tombe sur une contradiction et donc rejette H2. Mais... cela prouve simplement
que dans sa démonstration il y a un problčme et on verra pourquoi dans le chapitre
suivant.
Sous H3 (les angles C et D sont aigus) il n’arrive pas ŕ une contradiction et démontre męme des propriétés telles que :
Deux droites sont : soit sécantes, soit admettent une perpendiculaire commune et alors elles "divergent", soit elles sont "asymptotes" l’une de l’autre.
N’arrivant pas ŕ une contradiction, il abandonne et trouve ses résultats insupportables !
En fait Saccheri peut ętre considéré comme celui qui a établi les premiers résultats de géométrie non euclidienne mais les trouvant horribles et opposés au bon sens il ne les publiera pas. Il sera redécouvert par le mathématicien italien Beltrami au XIXe sičcle.
Lambert connaît les travaux de Saccheri, mais préfčre s’appuyer, comme Ibn al-Haytam, sur un
quadrilatčre ŕ trois angles droits. Il fait alors trois hypothčses : le quatričme angle est, soit droit,
soit aigu, soit obtus.
*Sous l’hypothčse de l’angle droit il démontre P5.
**Il rejette l’hypothčse de l’angle obtus en faisant la męme erreur que Saccheri.
*** Sous l’hypothčse de l’angle aigu, il obtient un certains nombre de résultats et n’arrive pas ŕ une contradiction !
Mais il démontre des résultats de la géométrie non euclidienne tels que la somme des angles d’un triangle est inférieure ŕ 180 degrés ou encore l’ensemble des points situés ŕ égale distance d’une droite donnée n’est pas une droite ! Ou encore qu’il n’y a pas, sous cette hypothčse, de triangles semblables... (cf chapitre 2 pour quelques démonstrations). De plus il est le premier ŕ démontrer que la somme des angles d’un triangle dépend de son aire.
Mais comme Saccheri, Lambert renonce ŕ aller plus loin : il est en effet, comme tout le monde ŕ l’époque, de philosophie Kantienne : les axiomes de la géométrie doivent ętre le reflet des propriétés de l’espace sensible.
Il est le dernier mathématicien avant les créateurs des GNE ŕ s’ętre intéressé au problčme
des parallčles.
Pour démontrer P5 il démontre en particulier que la somme des angles d’un triangle est égale
ŕ 180 degrés et cela de maničre tout ŕ fait intéressante :
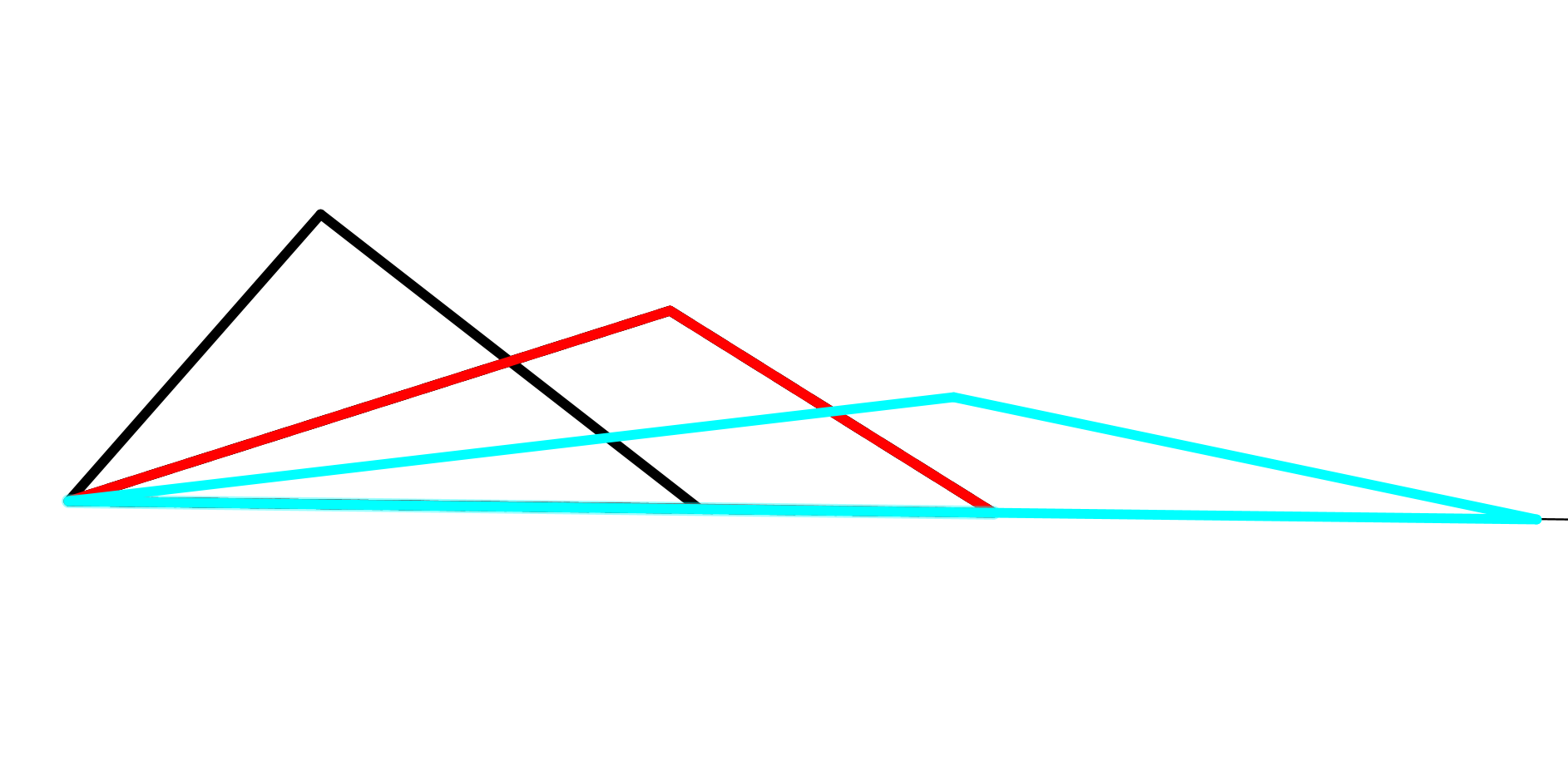
il construit une succession de triangles (sur la figure, noir, rouge, bleu) dont les angles ŕ la base tendent vers 0 mais dont la somme des angles ne varie pas. Il pense alors démontrer que le troisičme angle du triangle tend vers 180 degrés mais c’est lŕ oů il se trompe. (cf chapitre 2 pour la démonstration)
Son passage ŕ la limite revient ŕ supposer que P5 est vrai ! Donc une fois de plus on tourne en rond. (cf chapitre suivant pour la démonstration) 4
L’espace aristotélicien, donc des grecs, est essentiellement qualitatif et parfaitement hiérarchisé. Il est fondé sur l’expérience et nos sens. Pour Aristote, les mathématiques ne peuvent pas expliquer le monde réel.
Cette conception présente cependant présente un avantage : elle permet de ne pas lier la
géométrie au cosmos et donc de pouvoir envisager comme hypothčse "la somme des angles dans
un triangle n’est pas égale ŕ 180 degrés" comme possible, męme si cette hypothčse n’a pas
été exploitée.
C’est Galilée qui va détruire le cosmos grec et c’est en cela qu’il est révolutionnaire. Il faut reconnaître qu’il était de plus en plus difficile d’expliquer les phénomčnes astronomiques par la physique d’Aristote : la connaissance du mouvement des plančtes ou des astres devient de plus en plus précis et nécessite des calculs de plus en plus compliqués si l’on veut rester dans un systčme géocentrique (cf ŕ la théorie des épicycles).
Galilée va géométriser l’univers, son espace est mathématique.
C’est dans cet espace neutre, absolu, indépendant des objets qui s’y trouvent que
Newton va formuler ses lois. Cet espace est euclidien. Ainsi, non seulement la géométrie
restera l’art du raisonnement pur mais en plus la Nature devra s’y soumettre. Ce n’est
pas un hasard si Newton parle de Principes mathématiques de la Philosophie Naturelle.
Le génie de Newton ne peut que conforter ceux qui veulent démontrer P5 et refuser toute autre
hypothčse.
Dans le texte " De l’esprit géométrique et de l’art de persuader" Pascal exprime parfaitement son point de vue.
Tout d’abord la "véritable méthode, qui formerait les démonstrations dans la plus haute excellence, s’il était possible d’y arriver, consisterait en deux choses principales : l’une de n’employer aucun terme dont on n’eűt auparavant expliqué nettement le sens, l’autre, de n’avancer jamais aucune proposition qu’on ne démontrât par des vérités déjŕ connues."
Donc il faudrait tout définir et tout démontrer, ce qui, pour Pascal, est impossible. En effet "il
est évident que les premiers termes que l’on voudrait définir, en supposeraient de précédents pour
servir ŕ leur explication...et en poussant les recherches de plus en plus, on arrive nécessairement ŕ
des mots primitifs qu’on ne peut plus définir". Donc construire une science parfaite est impossible
pour l’ętre humain. Mais, pour Pascal, il ne faut pas renoncer ŕ la science. C’est la
géométrie qui est la plus proche, bien qu’imparfaite, des exigences dans la recherche de la
perfection.
Citons encore Pascal : "On trouvera peut-ętre étrange que la géométrie ne puisse définir aucune des choses qu’elle a pour principaux objets : car elle ne peut définir ni le mouvement, ni les nombres, ni l’espace...mais on ne sera pas surpris, si l’on remarque que cette admirable science ne s’attachant qu’aux choses les plus simples, cette męme qualité qui les rend dignes d’ętre ses objets, les rend incapables d’ętre définies ; de telle sorte que le manque de définition est plutôt une perfection qu’un défaut, parce qu’il ne vient pas de leur obscurité, mais au contraire de leur extręme évidence".
Ainsi on n’a pas ŕ définir ni les nombres, ni l’espace. Or ce sont justement les travaux sur les
nombres et l’espace qui vont permettre la création des géométries non euclidiennes. Pascal ferme
ainsi l’ouverture sur toute géométrie autre que celle d’Euclide.
Citons Descartes ŕ partir de son "Discours de la méthode". Son premier précepte est "de ne recevoir jamais aucune chose pour vraie, que je ne la connusse évidemment ętre telle : c’est-ŕ-dire, d’éviter soigneusement la précipitation et la prévention ; et de ne comprendre rien de plus en mes jugements, que ce qui se présenterait si clairement et si distinctement ŕ mon esprit, que je n’eusse aucune occasion de le mettre en doute."
Mais comment juger d’une évidence ? Descartes nous dit :
"Et remarquant que cette vérité : je pense, donc je suis, était si ferme et si assurée, que toutes les plus extravagantes suppositions des sceptiques n’étaient pas capables de l’ébranler, je jugeai que je pouvais la recevoir, sans scrupule, pour le premier principe de la philosophie que je cherchais."
Plus loin il rajoute :
" je jugeai que je pouvais prendre pour rčgle générale, que les choses que nous concevons fort clairement et fort distinctement sont toutes vraies ; mais qu’il y a seulement quelque difficulté ŕ bien remarquer quelles sont celles que nous concevons distinctement. En suite de quoi, faisant réflexion sur ce que je doutais, et que, par conséquent, mon ętre n’était pas tout parfait, car je voyais clairement que c’était une plus grande perfection de connaître que de douter, je m’avisai de chercher d’oů j’avais appris ŕ penser ŕ quelque chose de plus parfait que je n’étais ; et je connus évidemment que ce devait ętre de quelque nature qui fűt en effet plus parfaite. Pour ce qui est des pensées que j’avais de plusieurs autres choses hors de moi, comme du ciel, de la terre, de la lumičre, de la chaleur, et de mille autres, je n’étais point tant en peine de savoir d’oů elles venaient, ŕ cause que, ne remarquant rien en elles qui me semblât les rendre supérieures ŕ moi, je pouvais croire que, si elles étaient vraies, c’étaient des dépendances de ma nature, en tant qu’elle avait quelque perfection ; et si elles ne l’étaient pas, que je les tenais du néant, c’est-ŕ-dire qu’elles étaient en moi, parce que j’avais du défaut. Mais ce ne pouvait ętre le męme de l’idée d’un ętre plus parfait que le mien : car, de la tenir du néant, c’était chose manifestement impossible ; et parce qu’il n’y a pas moins de répugnance que le plus parfait soit une suite et une dépendance du moins parfait, qu’il y en a que de rien procčde quelque chose, je ne la pouvais tenir non plus de moi-męme. De façon qu’il restait qu’elle eűt été mise en moi par une nature qui fűt véritablement plus parfaite que je n’étais, et męme qui eűt en soi toutes les perfections dont je pouvais avoir quelque idée, c’est-ŕ-dire, pour m’expliquer en un mot, qui fűt Dieu. "
Ainsi, pour Descartes, "je pense donc je suis" est la preuve de son existence, donc des choses qu’il conçoit clairement et distinctement, évidences qui lui viennent de Dieu.
Cet espace physique dans lequel nous vivons étant une évidence, on ne peut pas le remettre en cause. Cet espace pour Descartes est euclidien et si la géométrie n’a d’autre utilité que servir ou illustrer cet espace, il n’y a pas de place pour une autre géométrie. Ainsi le postulat cinq doit ętre démontrable ou alors sa négation doit conduire ŕ une contradiction. Saccheri, en particulier n’y arrive pas. D’oů son dépit.
Avant Kant, il y avait un espace dans lequel un certain nombre d’objets de toutes natures se déplaçaient et nous, ętres humains, nous observions ces objets grâce ŕ nos cinq sens. Cet espace est réel.
Kant ne se prononce pas sur sa réalité. L’espace est une donnée ŕ priori indépendante de toute expérience. Il est ŕ la base de toutes nos intuitions concernant ce qui nous entoure. Cet espace ne peut se représenter que d’une seule maničre : il est euclidien ŕ trois dimensions.
De plus, pour Kant, comme pour les autres philosophes ou mathématiciens de cette époque, la
géométrie euclidienne est le prototype de la pensée claire et du raisonnement logique. Emmanuel
Kant pensait que ce prototype était inscrit dans le cerveau humain. C’est lui qui nous permet de
percevoir le monde extérieur.
Donc toute géométrie non euclidienne serait un non sens.
Le XVIIeme et le XVIIIeme sičcles sont donc trčs peu favorables ŕ la découverte ou ŕ la création d’autres géométries.
La remise en cause de ces conceptions se fera par la reconstruction des mathématiques, par la redéfinition de leur place dans l’ensemble des connaissances, par celle de la géométrie dans les mathématiques, par la remise en cause de l’espace physique newtonien avec, par exemple, Maxwell et, surtout, Einstein.
Toutes ces questions seront débattues au XIXeme et au XXeme sičcle .
Il y a une permanence dans l’histoire des mathématiques : quand un nouveau concept apparaît
il est d’abord rejeté car trop "abstrait". Puis accepté avec réticence car il est utile dans les
applications. Enfin il est pleinement reçu quand il est reconstruit de maničre ŕ ętre cohérent
avec le reste des connaissances mathématiques.
Deux exemples : D’abord les nombres négatifs qui sont considérés comme des nombres "faux"
(Descartes). Dans l’Encyclopédie de Diderot-d’Alembert, on voit bien qu’ils n’ont pas toujours de
statut : en effet les nombres sont liés indissolublement aux grandeurs géométriques et une
grandeur géométrique est un nombre positif. En fait c’est la notion de nombre qui ne sera
clairement défini qu’ŕ la fin du XIXe sičcle !
Ensuite le "nombre imaginaire ou complexe"
dont le
carré est égal ŕ -1, est introduit au XVIčme . Ce nombre dont le carré est négatif est en
contradiction complčte avec les connaissances de l’époque. Il va pourtant ętre utilisé car il
permet de résoudre de nouvelles équations. Les nombres dits "complexes" ne seront construits
correctement qu’ŕ la fin du XIXe.
Quant aux géométries non euclidiennes elles mettront 21 sičcles ŕ exister malgré la
démarche d’Euclide qui incite ŕ les construire ! Il faut bien dire "ŕ exister", parce
qu’elles ont déjŕ été en partie élaborées (Saccheri, certains mathématiciens arabes)
mais c’est leur existence que l’on a refusé d’admettre ! Pourquoi un accouchement si
difficile ?
Il y a plusieurs raisons (dont il est difficile de faire la liste !).
— A quoi bon créer une géométrie qui ne serait pas supérieure ŕ la premičre, qui n’aurait
aucune application ni en mathématique, ni dans le monde sensible ? La curiosité a beau ętre un
moteur dans la recherche mathématique elle a aussi ses limites !
—l’Univers est géré depuis Galilée, Newton et Descartes par la géométrie euclidienne. Il
faut réaliser que certains universitaires, ŕ la fin du XIXe, ne prennent plus d’étudiants chercheurs
en physique parce qu’il n’y aurait plus rien ŕ découvrir !
— Il y a la position philosophique de Kant.
— Peut ętre que l’on ne peut pas imaginer qu’il y a plusieurs géométries vraies. Comment
serait-il possible qu’en niant (au sens logique) la géométrie euclidienne on obtienne une autre
théorie tout aussi vraie ? Et la question que l’on doit se poser est le sens que l’on donne ŕ
vrai.
— Enfin la raison la plus forte est, sans doute ŕ chercher dans les mathématiques
elles męmes : quelle est leur place ? qu’y fait-on exactement ? Qu’est-ce qu’une activité
mathématique ?
Comment peut-on expliquer qu’au début du XIXe trois mathématiciens vont élaborer presque simultanément (entre 1820 et 1840), (mais sans ętre au courant du travail des autres), une géométrie non euclidienne ? On pourrait donner plusieurs raisons :
La premičre c’est peut-ętre la Révolution Française : en effet elle va inciter les hommes ŕ revendiquer leur liberté et donc la liberté de créer indépendamment de l’académisme (voire contre). Indépendamment de la Révolution Française, créer une nouvelle théorie dans quelque domaine que ce soit est une revendication de liberté !
La deuxičme, et c’est sans doute la plus importante, c’est l’explosion des mathématiques avec Pascal, Descartes, Euler, Lagrange et bien d’autres, les Eléments d’Euclide ne pouvant plus ętre leur synthčse.
La troisičme est le travail accumulé au cours des sičcles passés sur le sujet.
Les trois précurseurs principaux sont Gauss, Bolyai et Lobatchevski :
Ce qui distingue fondamentalement ces mathématiciens de ceux qui les ont précédés c’est leur démarche : ils ont construit une nouvelle géométrie alors que les autres ont essayé de démontrer le postulat des parallčles et que jamais ils n’ont mis en doute l’idée qu’il y avait une seule géométrie.
Mais ils ont eu trčs peu de succčs :
Lobatchevski a publié ses travaux en russe et a été peu lu. Il appelait lui-męme sa géométrie "imaginaire".
Gauss n’a rien publié par peur de créer trop de scandale ( Il était impensable de créer une nouvelle géométrie...). Peut-ętre aussi attendait-il que l’expérience physique lui donne raison. Mais comment est validée une théorie mathématique ? Jusqu’au début du XIXčme par l’évidence et plus particuličrement par l’intuition de l’espace ŕ trois dimensions. C’est cette notion de validation d’une théorie mathématique qui va ętre discutée et rediscutée au XIXčme et au XXčme .
Quant ŕ Bolyai il a été découragé par Gauss qui, affirmait-il, avait déjŕ tout écrit sur le sujet et par son pčre lui-męme.
On appelle géométrie neutre ( G.N.) l’ensemble des définitions de la géométrie euclidienne, ses
postulats sauf P5, ses axiomes et les théorčmes ne nécessitant pas le postulat des parallčles.,
c’est ŕ dire les 28 premiers théorčmes.
Rajoutons ŕ cette géométrie une négation possible du postulat des parallčles. On
obtient :
P’5 : il existe au moins une droite (AB) et au moins un point P n’appartenant pas ŕ (AB) tels
qu’il existe au moins deux droites passant par P et parallčles ŕ (AB).
A partir de lŕ on démontre le premier théorčme : quel que soit le point P du plan et quelle
que soit la droite (AB) ne passant par P, il existe au moins deux droites parallčles ŕ (AB) et
passant par P.
Puis on démontre un théorčme dans lequel on précise, sous les hypothčses précédentes,
parmi les droites passant par P, celles qui sont parallčles ŕ (AB) et celles qui ne le sont
pas.
On peut alors démontrer que la somme des angles est inférieure ŕ 180 degrés.(Cf au chapitre suivant pour certaines démonstrations).
Et Lobatchevski va construire une géométrie qu’il va appeler lui-męme imaginaire mais totalement cohérente, construction qu’aurait pu faire Saccheri.
Voici un autre théorčme de cette " nouvelle " géométrie : "Si on prolonge de plus en plus loin deux lignes parallčles dans le sens de leur parallélisme, elles s’approcheront de plus en plus l’une de l’autre " .
Et la construction d’une nouvelle géométrie est lancée !
Poincaré illustrera cette nouvelle géométrie de la maničre suivante en inventant un univers
dont on donnera une construction mathématique dans le chapitre 3.
On considčre un monde dont les habitants sont enfermés dans un demi-plan P de bord D. Dans
cet univers plus un habitant se rapproche du bord de P et plus il devient petit et donc que ses pas
tendront vers 0 sans qu’il s’en aperçoive (en effet tout rapetisse autour de lui, ses instruments de
mesure compris !).
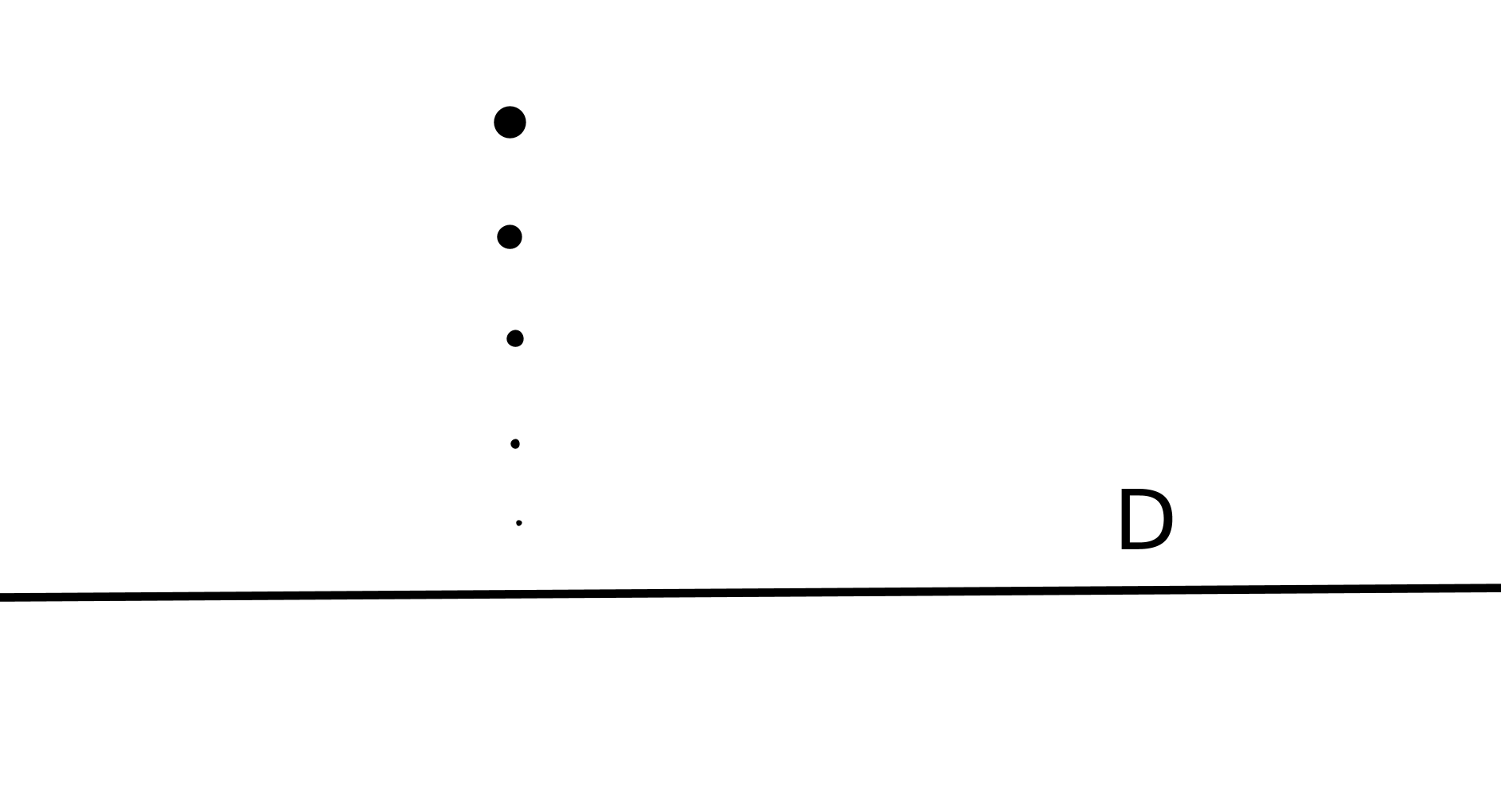
Ainsi il ne pourra jamais atteindre le bord. Nous, de l’extérieur, avec notre œil "euclidien", nous
voyons bien que son univers est fini, mais lui le verra infini.
Pour joindre un point ŕ un autre cet habitant n’aura pas toujours intéręt ŕ aller en ligne
droite : en effet plus il s’approche du bord et plus ses pas sont petits. Son expérience lui prouve
que, pour aller d’un point ŕ un autre, il aura intéręt ŕ procéder de la maničre
suivante :
si les deux points forment une ligne perpendiculaire au bord de P il ira en ligne droite mais si les
deux points ne forment pas une ligne perpendiculaire, il parcourra l’arc de cercle joignant les deux
points et de centre un point du bord.
Une droite dans la géométrie euclidienne est le chemin le plus court d’un point ŕ un autre. Si on part de cette définition, dans le demi-plan P les droites seront soit les segments de droites perpendiculaires au bord soit les arcs de cercles dont le centre est sur le bord. Ces droites vérifient les quatre premiers postulats mais pas P5.
En effet :
le postulat 1 demande que l’on puisse joindre un point ŕ un autre : dans notre demi-plan on sait
joindre un point ŕ un autre parce que l’on sait construire un segment ou un arc de cercle joignant
deux points.
Le postulat 2 demande que l’on puisse prolonger une droite de chaque côté de maničre
continue : ici c’est encore vrai : si on prend un segment de droite perpendiculaire au bord on pourra le
prolonger autant qu’on veut puisque plus on sera proche du bord et plus nos pas sont petits donc on
se rapprochera du bord indédifiment sans jamais l’atteindre. Pour un arc de cercle c’est encore vrai.
Le postulat 3 demande ŕ ce que, ŕ partir d’un point qu’on appelle centre et d’un segment
donné on puisse tracer un cercle. Dans notre demi-plan on peut le faire sachant que le cercle obtenu
sera comme notre cercle euclidien mais avec un centre décalé.
Le postulat 4 demande ŕ ce que tous les angles droits soient égaux. Une fois de plus cela sera
encore vrai ici ( cela sera détaillé ans le chapitre 3)
Le postulat 5 équivaut ŕ l’affirmation suivante : il existe une droite parallčle et une seule ŕ une droite donnée et passant par un point donné. Dans notre demi- plan c’est faux !
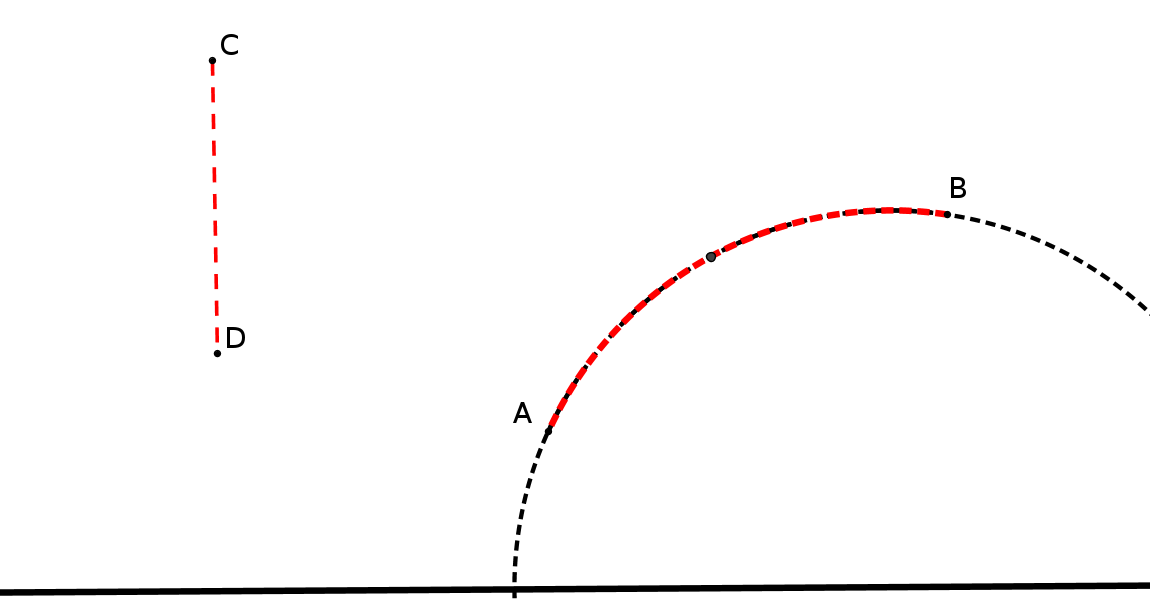
On a tracé, ci-dessous, la figure sur laquelle on a pris un point C et la "droite" D tracée en bleu.
On a tracé aussi les droites "noires" et deux droites "rouge".
Il faut insister sur le fait que toutes ces droites se rapprochent indéfiniment du bord sans le
toucher.
On voit, sur la figure ci-dessus, qu’il existe une infinité de droites parallčles ŕ (D) passant par
C .
Les droites situées entre les droites rouges sont sécantes avec D et celles situées en dehors de cette
bande passent par C et sont parallčles ŕ D. Il y a donc un infinité de droites passant par un point
donné et parallčles ŕ une droite donnée.
Voilŕ ce qu’en dit le mathématicien Etienne Gys (contemporain) : " les gens (qui vivent dans ce
monde) sont raisonnables, ils ne savent pas qu’ils rapetissent. Mais ils sont tout aussi raisonnables que
nous qui ignorons probablement beaucoup d’autres choses. La morale de cette petite histoire de
Poincaré est qu’on peut trčs bien envisager beaucoup de mondes extręmement raisonnables, chacun
ayant sa géométrie, chacun ayant sa logique et qui chacun peuvent nous apporter une vision de
notre monde concret [...]."
Le mathématicien d’aujourd’hui pour résoudre un problčme, pour étudier une question, va
utiliser une géométrie, va prendre sa boite ŕ outils, et va choisir la géométrie la plus convenable
pour comprendre le problčme étudié.
Pour conclure voici une phrase de Poincaré :"Une géométrie ne peut ętre plus vraie qu’une
autre, elle peut simplement ętre plus commode."
Riemann (1826-1866) va construire une nouvelle géométrie non euclidienne mais par des chemins complčtement différents. Il va étudier les propriétés géométriques des surfaces non pas en les replongeant dans l’espace mais en construisant une géométrie sur la surface elle-męme.
Pour donner un exemple on étudiera les propriétés géométriques d’une sphčre indépendamment de l’ espace dans lequel elle appartient : sur la Terre il n’existe pas de droites parallčles...
Riemann va surtout introduire une nouvelle conception de la distance. Nous n’avons absolument pas parler de distance pour l’instant et pourtant c’est une notion qui intervient sans cesse ! Qu’est-ce qu’un espace dans lequel il y a une distance ? Dans l’espace euclidien, celui de Descartes ou de Newton, les dimensions d’un objet sont les męmes quelles que soient son lieu, sa vitesse ou son mouvement. Pour Euclide comme pour Newton, la notion de distance comme celle de temps est absolue, universelle. Le rôle de cet espace euclidien se limite ŕ celui d’une étendue indéfinie et neutre, ŕ un réceptacle dans lequel sont plongés les corps.
Riemann sera le premier ŕ remettre en cause cette conception męme si, ŕ son époque, elle est validée par l’ expérience et la physique de Newton. L’espace de Riemann qui est en interaction avec le corps qui s’y déplace, cet espace créé, comme les géométries non euclidiennes, indépendamment de l’ expérience sera validé par...l’expérience, celle de la relativité générale d’Einstein, cinquante ans plus tard. L’espace de cette théorie étant un espace ŕ quatre dimensions, régi par une métrique dépendant de l’état, de la répartition et du mouvement de la matičre.
Si l’on reprend le demi-plan de Poincaré, et on le verra dans le chapitre 3, la notion de mesure, la distance qui est utilisée dans cet univers va dépendre de l’endroit oů on se situe.
Les réactions ŕ l’annonce de ces nouvelles géométries ont été vives, parfois violentes. Il est intéressant de noter, contrairement ŕ ce que l’on pourrait croire, que beaucoup de mathématiciens ou philosophes réputés ont exprimé leurs réticences.
Quelques exemples :
En Russie Ostrogradski qui est l’autorité mathématique supręme considčre les travaux de Lobatchevski "sans intéręt et entachés d’erreurs".
Le grand mathématicien anglais Cayley a refusé jusqu’au bout toute validité aux GNE. Il considčre la GNE de Lobatchevski comme "étrange" et "incompréhensible".
Un des adversaires les plus intolérants, les plus étonnants a été le fondateur de la logique moderne Frege : "oserait-on qualifier d’astrologie les Eléments d’Euclide, œuvre jouissant d’une incontestable autorité depuis plus de 2000 ans ? Si l’on n’ose pas c’est la GNE que l’on doit classer dans les pseudo sciences (astrologie, alchimie)."
L’un des pires opposants aura été le philosophe allemand Duhring qui jouissait d’une excellente réputation en Allemagne et qui avait des compétences réelles en mathématiques. Il parlait, par exemple, "des parties dégénérées du cerveau de Gauss" ou encore traitait la GNE "d’insanité démentielle. Ses attaques étaient trčs virulentes ! Rappelons qu’il était un personnage excécrable, qu’il pensait avoir trouvé dans la biologie la justification de l’antisémitisme. Donc au lieu de baptiser les juifs il fallait les éliminer biologiquement ! Il était suffisamment célčbre et écouté pour que Engels écrive un livre dont le titre est "anti Duhring" (dans lequel il dénonce le matérialisme non dialectique de Duhring).
On pourrait citer d’autres exemples. Il faut retenir que les critiques contre les GNE n’émanent pas que d’ignorants ! En fait pour accepter les GNE il a fallu changer philosophiquement d’attitude. Il a fallu se plonger dans le fondement des mathématiques.
Les géométries non-euclidiennes ont remis en cause, dans un premier temps, la validité des éléments d’Euclide. Elles étaient d’autant plus inadmissibles qu’avec le développement des mathématiques beaucoup considérčrent la géométrie comme étant simplement une théorie physique donc détachée des mathématiques ! Comme on vit au XIXe dans l’univers de Newton donc euclidien les GNE sont impossibles et fausses.
Les géométries non-euclidiennes nous font entrevoir d’autres mondes possibles, une autre vision de notre univers.
C’est Hilbert qui, en 1899, a remis les géométries au sein des mathématiques en réalisant une géométrie axiomatisée qui regroupe toutes les géométries. Il y a eu une révolution en mathématiques au XIXčme sičcle mais cette révolution a été provoquée beaucoup plus par l’introduction de la notion de structure que par la création de nouvelles géométries. Cette notion a permis de définir la notion de nombre correctement puis de classer les différentes géométries de maničre rigoureuse.
Finalement les géométries non euclidiennes sont simplement des livres que l’on pourrait rajouter aux éléments d’Euclide. Le postulat 5 est indémontrable et cela clôt le débat ouvert il y a 2000 ans !
Le but de ce chapitre est de reprendre les démarches des mathématiciens dont on a parlé dans le chapitre précédent, d’essayer de comprendre pourquoi ils se sont trompés en tentant de démontrer leurs affirmations en utilisant les connaissances de leur époque, c’est ŕ dire les Eléments d’Euclide. Donc nous commencerons par énoncer les théorčmes du livre 1 en faisant quelques commentaires sur les démonstrations.
Ne se servir que de la géométrie neutre, demande un véritable effort car il faut oublier beaucoup de résultats qui nous semblent évidents. Par exemple,des théorčmes tels que la somme des angles dans un triangle est égale ŕ 180 degrés ou encore qu’un quadrilatčre, qui a deux angles droits consécutifs et deux côtés opposés de męme longueur, est un rectangle.
Les figures sur lesquelles nous allons raisonner seront complčtement fausses : elles ne feront qu’illustrer des idées. Par exemple, les droites que nous considérerons ne seront pas, en fait, des droites euclidiennes : elles pourront éventuellement se couper en deux points distincts sans ętre confondues.
Il faudra donc lutter contre nos certitudes ! Les évidences !
Le but de cette partie est d’énoncer les définitions, postulats et les théorčmes du livre 1 qui
seront utilisés par la suite. On indiquera ŕ l’occasion quelques insuffisances dans les
démonstrations.
Nous utiliserons les notations des Eléments d’Euclide : une droite se notera AB sans parenthčses, comme dans les éléments d’Euclide, sachant qu’une droite est finie . Une droite pourra ętre plus petite, plus grande qu’une autre.
Il faudra faire attention aux mots :
Le mot égalité n’est pas défini dans les Eléments d’Euclide. On pourra dire que deux figures sont égales lorsque l’on peut les ajuster (axiome 8) mais aussi lorsqu’en les "découpant" on pourra ajuster les différents "morcaux".
Ainsi, lorsque Euclide dit que deux figures sont égales, cela correspondra pour nous ŕ plusieurs possibilités :
– les figures sont confondues.
– les figures sont isométriques.
– les figures ont la męme aire.
La notion d’opération n’existe pas. Par exemple, l’inégalité triangulaire s’exprimera par : deux
des trois côtés d’un triangle, pris de toute maničre, seront plus grands que le troisičme. Il y
aura un formalisme de langage, pas toujours accessible. Nous l’éviterons quand cela sera
possible.
Nous noterons Di, Pi, respectivement la définition i, le postulat i du livre 1 et Thi,j le
théorčme i du livre j.
Rappelons que la géométrie neutre, notée GN est l’ensemble des définitions, des
postulats, excepté le cinquičme, les axiomes et les vingt-huit premiers théorčmes du livre 1 qui
sont indépendants du cinquičme postulat.
rappelons les définitions, postulats et théorčmes qui nous intéressent pour la suite.
Définition 1 : Un point est ce qui n’a pas de partie.
Définition 2 : Une ligne est une longueur sans largeur.
Définition 3 : les limites d’une ligne sont les points.
Commentaire : une ligne est donc finie et ce n’est pas un ensemble de points. Mais on pourra
prendre autant de points que l’on veut sur une droite.
Définition 4 : une ligne droite est celle qui se couche de maničre égale entre ses
points.
Commentaire : cette définition prendra tout son sens plus loin. Si on prend une ligne droite et
deux points sur elle, la ligne droite qui joint ces deux points est sur la droite.
Définition 5 : une surface est ce qui n’a seulement qu’une longueur et une largeur.
Définition 6 : les limites d’une surface sont des lignes.
Commentaire : une surface est donc finie.
Définition 7 : une surface plane est celle qui se couche entre ses lignes.
Définition 8 : les limites d’une surface sont des lignes.
Définition 9 : un angle plan est l’inclinaison, dans un plan, de deux lignes, l’une par rapport ŕ
l’autre, se touchant, non couchées sur une męme ligne .
commentaire : un angle est, en fait, une surface comprise entre deux lignes sécantes.
Définition 10 : quand les lignes contenant l’angle dit sont droites l’angle est appelé
rectiligne.
Commentaire : on a bien la notion d’angle curviligne.
Définition 11 : quand une droite tombant sur une droite fait deux angles successifs égaux
entre eux, chacun des angles est droit et la droite tombant est appelée perpendiculaire ŕ la droite
sur laquelle elle tombe.
Commentaire : on ne sait pas encore si l’angle droit existe !
Définition 12 : l’angle obtus est celui qui est plus grand qu’un droit.
Commentaire : "plus grand" signifie que l’espace angle obtus contient un angle droit. Il n’ y a pas
de notion de mesure.
Définition 13 : l’angle aigu est celui qui est plus petit qu’un droit.
Définition 14 : une frontičre est l’extrémité de quelque chose.
Définition 15 : le cercle est une figure plane, entourée par une ligne, appelée circonférence,
pour laquelle toutes les droites, menées d’un point étant parmi ceux de la figure vers la
circonférence, sont égales.
Définition 16 : ce point est appelé centre du cercle.
Commentaire : 1. le cercle est ce que l’on appelle, aujourd’hui, disque.
Définition 17 : le diamčtre du cercle est une droite conduite par le centre et limitée de
chacun des côtés par la circonférence et qui coupe le cercle en deux.
Définition 18 : un demi-cercle est la figure entourée par le diamčtre et la circonférence du
cercle.
Définition 19 : un morceau de cercle est une figure comprise entre une droite et la
circonférence du cercle.
Définition 20 : les figures rectilignes sont celles comprises entre des droites.
Définition 21 : les trilatčres sont celles comprises entre trois droites.
Définition 22 : les quadrilatčres sont celles comprises entre quatre droites.
Définition 23 : les multilatčres sont celles comprises entre plus de quatre droites.
Définition 24 : parmi les figures trilatčres le triangle équilatéral est celui qui a trois côtés
égaux.
Il faudra démontrer qu’il existe des triangles équilatéraux.
Définition 25 : l’isocčle est celui qui a deux côtés égaux.
Définition 26 : le scalčne est celui qui a trois côtés inégaux.
Définition 27 : le triangle rectangle est celui qui a un angle droit.
Définition 28 : l’obtus angle est celui qui a un angle obtus.
Définition 29 : l’acutangle est celui qui a trois angles aigus.
Définition 30 : parmi les quadrilatčres, le carré est celui qui est équilatčre et
rectangle.
Définition 31 : le rectangle (ou oblong) est celui qui est rectangle mais pas équilatčre.
Commentaire : ainsi un rectangle n’est pas un carré, contrairement ŕ aujourd’hui.
Définition 32 : le rhombe est celui qui est équilatčre mais pas rectangle.
Définition 33 : le rhomboďde (ou oblong) est celui qui n’est ni rectangle ni équilatčre mais
qui a ses côtés et ses angles opposés égaux.
Définition 34 : sont appelés trapčzes ceux qui sont autres que ceux-lŕ.
Commentaire : ces définitions ne correspondent pas aux nôtres et on n’a pas la définition d’un
parallélogramme alors que le mot apparaît dans la suite.
Définition 35 : les droites parallčles sont celles qui sont dans un męme plan et, qui
prolongées sans fin de chaque côté, ne se coupent jamais entre elles.
Commentaire : on ne sait pas s’il existe des droites parallčles.
Un postulat est une "demande". On demande de savoir ou pouvoir faire quelque chose. Dans la
suite du livre cela pourrait-ętre démontré.
Postulat 1 : il est demandé de conduire de tout point vers tout point une ligne
droite.
Postulat 2 : et de faire sortir une droite limitée sur une droite de maničre continue.
Commentaire : on peut donc prolonger une droite "autant" que l’on veut.Par exemple,
dan la démonstration du théorčme 16 du livre 1, on double une droite sans aucune
contrainte. Ainsi est sous-jacent la rčgle d’Archimčde : si l’on prend deux droites il existe
entier
tel que
fois la premičre droite sera plus grande que la seconde. Cependant le mot "continűment" pourrait
ętre pris différemment :soient deux points A et B. On trace la droite AB. Soit un point C
sur AB. On obtient la ligne BC que l’on pourrait prolonger continűment sans atteindre
A.
Postulat 3 : de dessiner, de tout centre et de tout diamčtre, un cercle.
Postulat 4 : et que tous les angles droits sont égaux entre eux.
Postulat 5 : et que si une droite coupant deux droites fait ŕ l’intérieur et du męme côté
deux angles plus petits que deux droits, les deux droites prolongées sans fin se rencontrent entre elles
sur le côté oů les angles sont plus petits que deux droits.
Commentaire : les droites AC et BD coupent la droite AB en faisant des angles dont la somme est inférieure ŕ deux droits.
c’est donc le postulat que l’on va essayer de démontrer pendant plus de deux mille ans !
Postulat 6 : et que deux droites n’entourent pas un domaine.
Commentaire : cela implique que deux droites ayant deux points communs sont égales. On va voir
par la suite que c’est un postulat important.
Les grecs appellent les axiomes "notions communes", c’est-ŕ-dire des affirmations
indémontrables, qui vont de soi (attitude peu mathématique !).
axiome 1 : les chose égales ŕ une męme chose sont égales entre elles.
Commentaire : de quelles choses parle-t-on ?
axiome 2 : et s’il est ajouté des chose égales ŕ des choses égales les tout seront
égaux.
axiome 3 : et s’il est retranché des chose égales ŕ des choses égales les restes seront
égaux.
axiome 4 : et s’il est ajouté des chose égales ŕ des choses inégales les tout seront
inégaux.
axiome 5 : et s’il est retranché des chose égales ŕ des choses inégales les restes seront
inégaux.
axiome 6 : et les choses doubles d’une męme chose sont égales entre elles.
axiome 7 : et les choses moitié d’une męme chose sont égales entre elles.
axiome 8 : et les choses qui s’ajustent entre elles sont égales entre elles.
axiome 9 : et le tout est plus grand que la partie.
Commentaire : naturellement, c’est faux dans un ensemble infini, mais pour les grecs un tout infini
n’a pas de sens.
Nous énoncerons les théorčmes du livre 1 des Eléments d’Euclide en indiquant ceux
qui nécessitent P5 ou P6 et démontrerons ceux aussi ceux dont la démonstration est
insuffisante.
théorčme 1 : construire un triangle équilatéral.
Démonstration : On trace une droite AB (P1).
On construit le cercle C de centre A et de rayon AB (P3)
puis le cercle C’ de centre B et de rayon AB.
Alors les deux cercles se coupent en un point C. Et le triangle ABC est équilatéral.
Commentaire : On "voit" que les cercles se coupent, mais rien dans les définitions ou postulats ou axiomes ne nous le dit. Il faudrait donc ajouter un nouveau postulat, P7, suivant :
P7 : un cercle partage le plan en deux domaines et si on prend un point dans le cercle et un autre
ŕ l’extérieur, toute ligne joignant les deux points coupe le cercle en un point.
Ainsi, on pourra affirmer que C’ coupe C.
théorčme 2 : d’un point donné A, placer une droite égale ŕ une droite donnée
BC.
Démonstration : On construit le triangle équilatéral ABD (th1.1),
puis le cercle de centre B et de rayon BC (P1). DB coupe ce cercle en E (quitte ŕ prolonger DB (P2)).
Puis le cercle de rayon DE qui coupe AD en F (P1).
On a alors ,
,
. Donc
.
Commentaire : on se sert manifestement de la figure. Pour ętre rigoureux, il faudrait prendre tous les cas de figures : par exemple : que se passe-t-il si ? On s’en sort mais il faudrait le faire !
En fait, DB coupe le cercle en deux points : la démonstration donne-t-elle le męme résultat ?
oui, mais encore faudrait-il le faire.
théorčme 3 : on donne deux droites de longueur inégale, ôter de la plus grande
une droite égale ŕ la plus petite.
théorčme 4 : si deux triangles ont un angle égal et les côtés qui entourent cet
angle égaux alors les bases des triangles sont égales. Alors les triangles seront égaux
et les angles restants aussi.
commentaire ici P6 intervient !
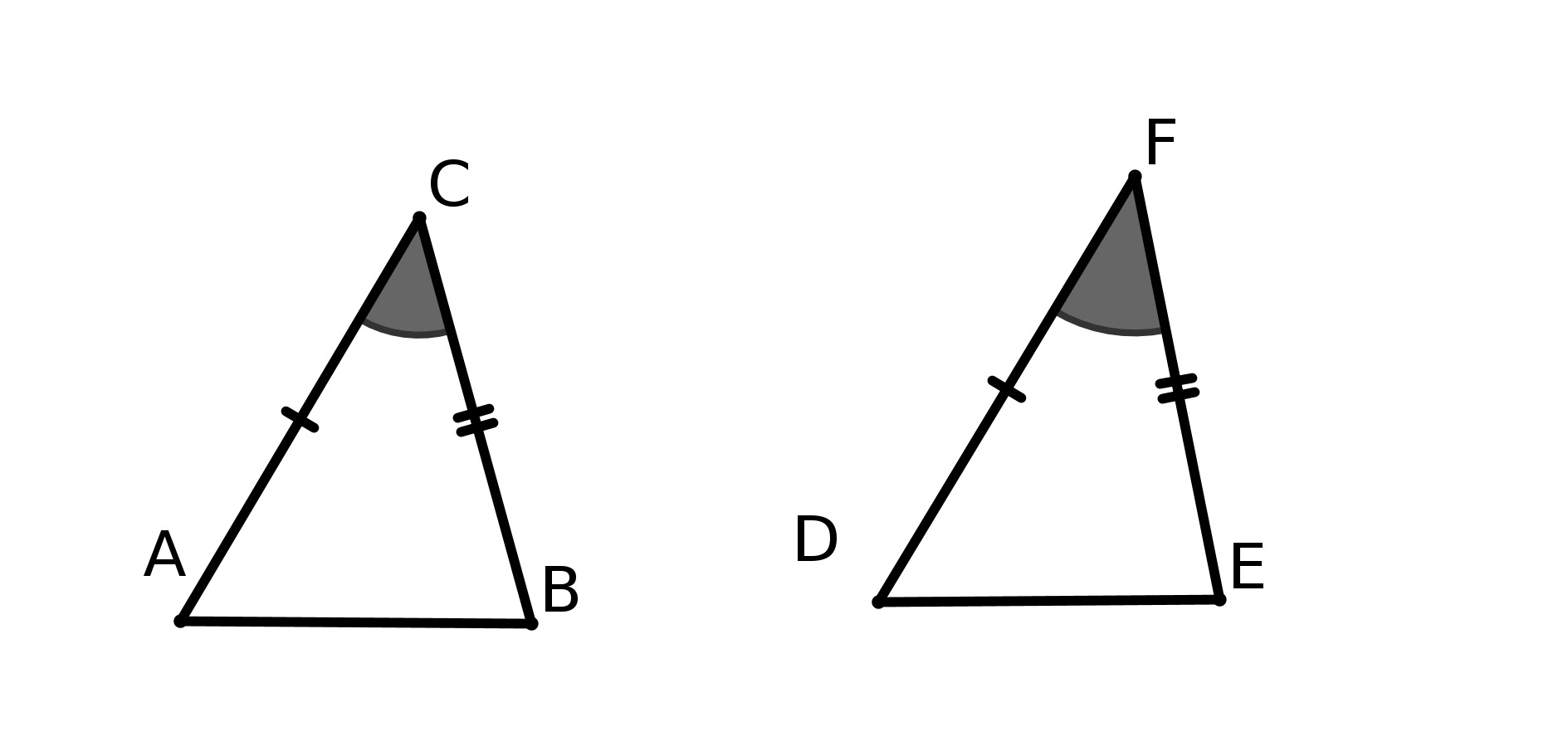
démonstration : Soient deux triangles ABC et DEF tels que , et .
Appliquons C sur F puis CA sur FD
comment fait-on pour appliquer une figure sur une autre ? on a ŕ priori aucun outil dans Euclide pour le faire !.
Alors A s’applique sur D.
Mais CA s’appliquant sur FD, CB s’appliquera sur FD puisque donc B s’appliquera sur E puisque .
A s’applique sur D et B sur E donc AB s’applique sur DE sinon deux droites entoureraient un
domaine ce qui contredit P6.
Commentaire : Si on enlčve de GN le postulat 6 cela signifiera que le th 4 sera faux lorsque deux
points définiront plus de deux droites, mais juste sinon.
Pour Euclide les triangles étant ajustables, ils sont égaux. Pour nous ils sont isométriques ou
congruents.
Théorčme 5 : dans un triangle isocčle les angles ŕ la base sont égaux.
Commentaire : la démonstration dépend de th4 donc de P6.
Théorčme 6 : si un triangle a deux angles égaux entre eux les côtés qui sous
tendent les angles sont égaux.
Commentaire : la démonstration dépend de th4 donc de P6.
Théorčme 7 : sur une męme droite, ŕ partir de deux points situés du męme
côté de cette droite il n’est pas possible de tracer deux droites égales ŕ deux
autres droites, chacune ŕ chacune, ayant les męmes extrémités que ces
autres.
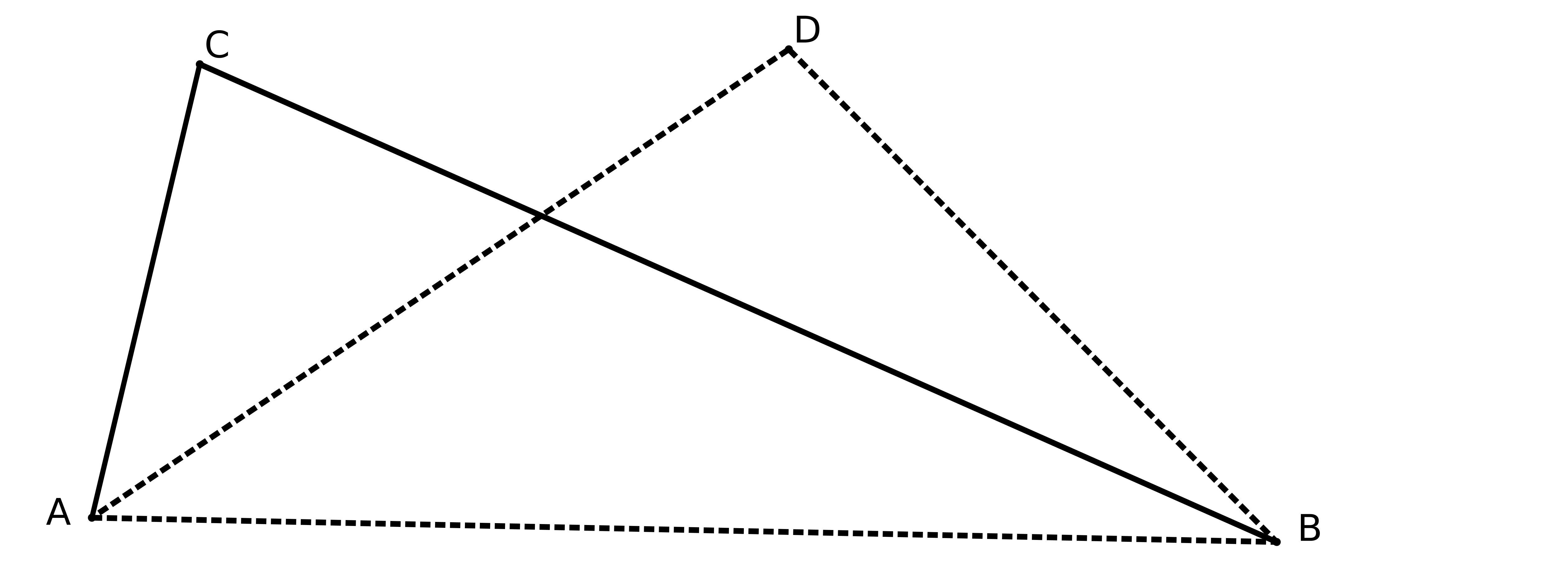
commentaire : Cela signifie que si on prend une droite AB, deux points situés du męme côté
de AB et que l’on trace les droites CA et CB, on ne peut pas tracer deux droites issues de D telles que
et
.
Il manque lŕ un postulat que nous nommerons P8 : une droite partage le plan en deux régions ayant comme frontičre la droite et si l’on prend un point de part et d’autre de la droite, la droite joignant les deux points coupe la droite.
Avec ce postulat il est possible de choisir deux points du męme côté de AB.
Théorčme 8 : si deux triangles ont deux côtés égaux, chacun ŕ chacun, et la
base égale ŕ la base, alors ils auront un angle égal ŕ un angle égal, celui qui est
compris entre les côtés égaux.
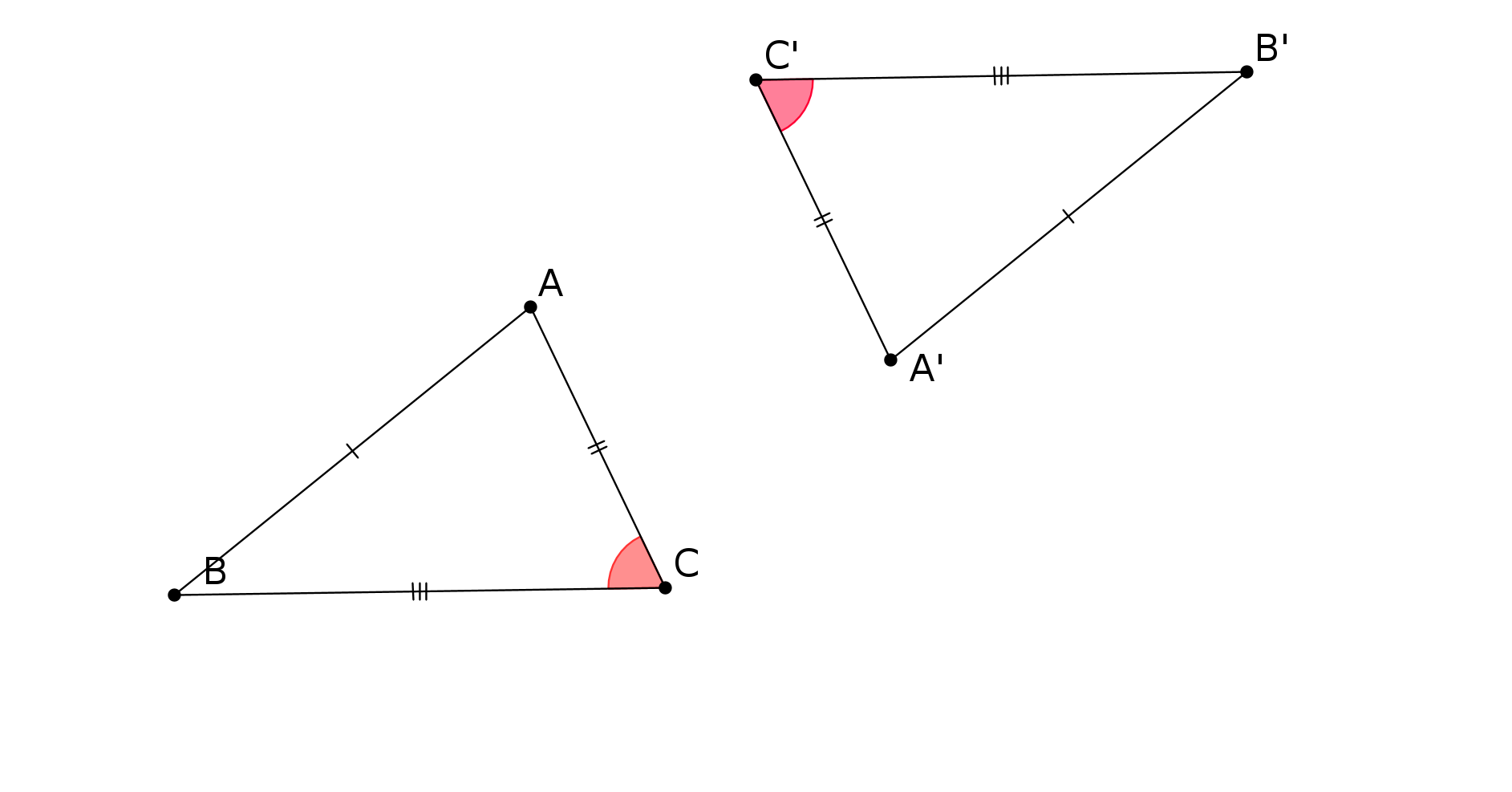
Théorčme 9 : couper un angle rectiligne en deux.
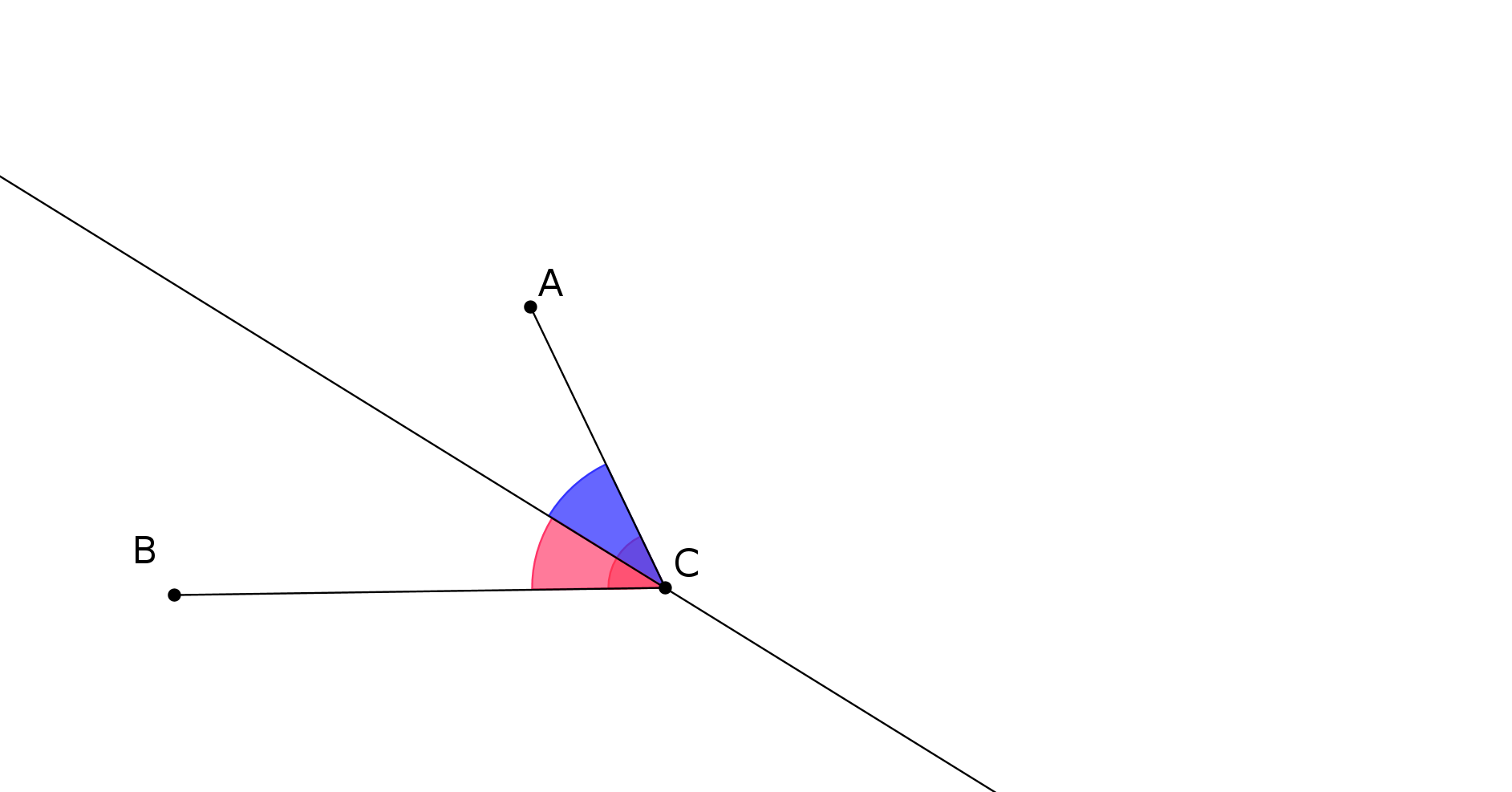
Théorčme 10 : couper une droite donnée en deux.
Théorčme 11 : ŕ une droite donnée, d’un point donné de cette droite, mener
une ligne droite avec des angles droits.
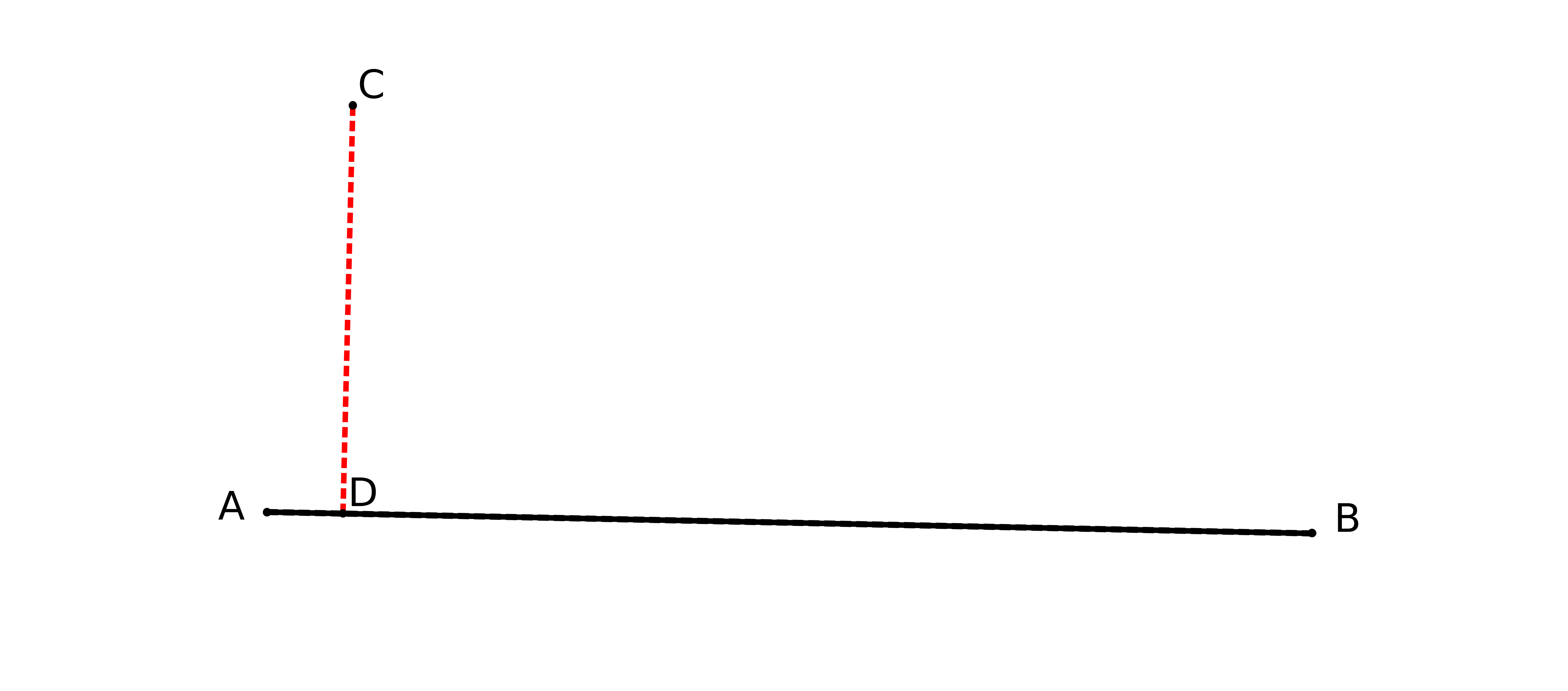
Théorčme 12 : ŕ une droite donnée, d’un point donné n’appartenant pas ŕ
cette droite, mener une ligne droite avec des angles droits.
Théorčme 13 : si une droite tombant sur une droite fait deux angles, soit ils sont
droits, soit ils font ensemble deux droits.
Théorčme 14 : si ŕ partir d’une droite et d’un point de cette droite, deux droites
non situées du męme côté, font ensemble deux angles égaux ŕ deux droits, ces
deux droites sont situées dans la męme direction.
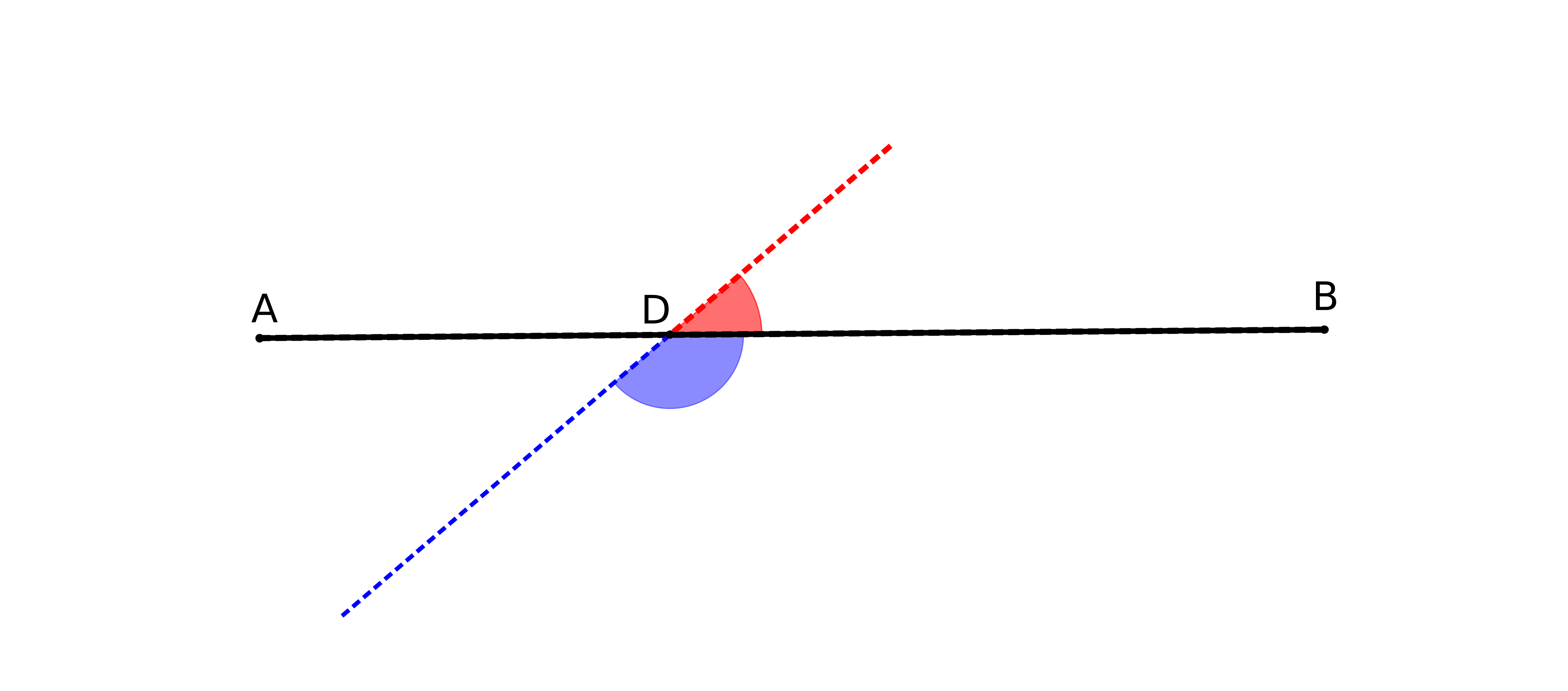
Théorčme 15 : si deux droites se coupent entre elles, elles font des angles égaux
au sommet.
Théorčme 16 : le côté d’un triangle étant prolongé, l’angle extérieur est plus
grand que chacun des angles opposés et extérieurs.
est l’angle
extérieur, l’angle
intérieur et
l’angle opposé.
démonstration : Soit E le milieu de AC (th10)
et soit F tel que (th2).
On a : , et (Th15.1)
donc les triangles AEB et FEC sont égaux (th4).
Donc les angles et sont égaux (th4).
B, E et C ne sont pas alignés donc F ne peut pas ętre sur CD. Sinon BF et BD seraient deux droites distinctes entourant un domaine et cela contredirait P6.
Donc .
Donc .
CQFD. Męme démonstration pour l’angle ABC.
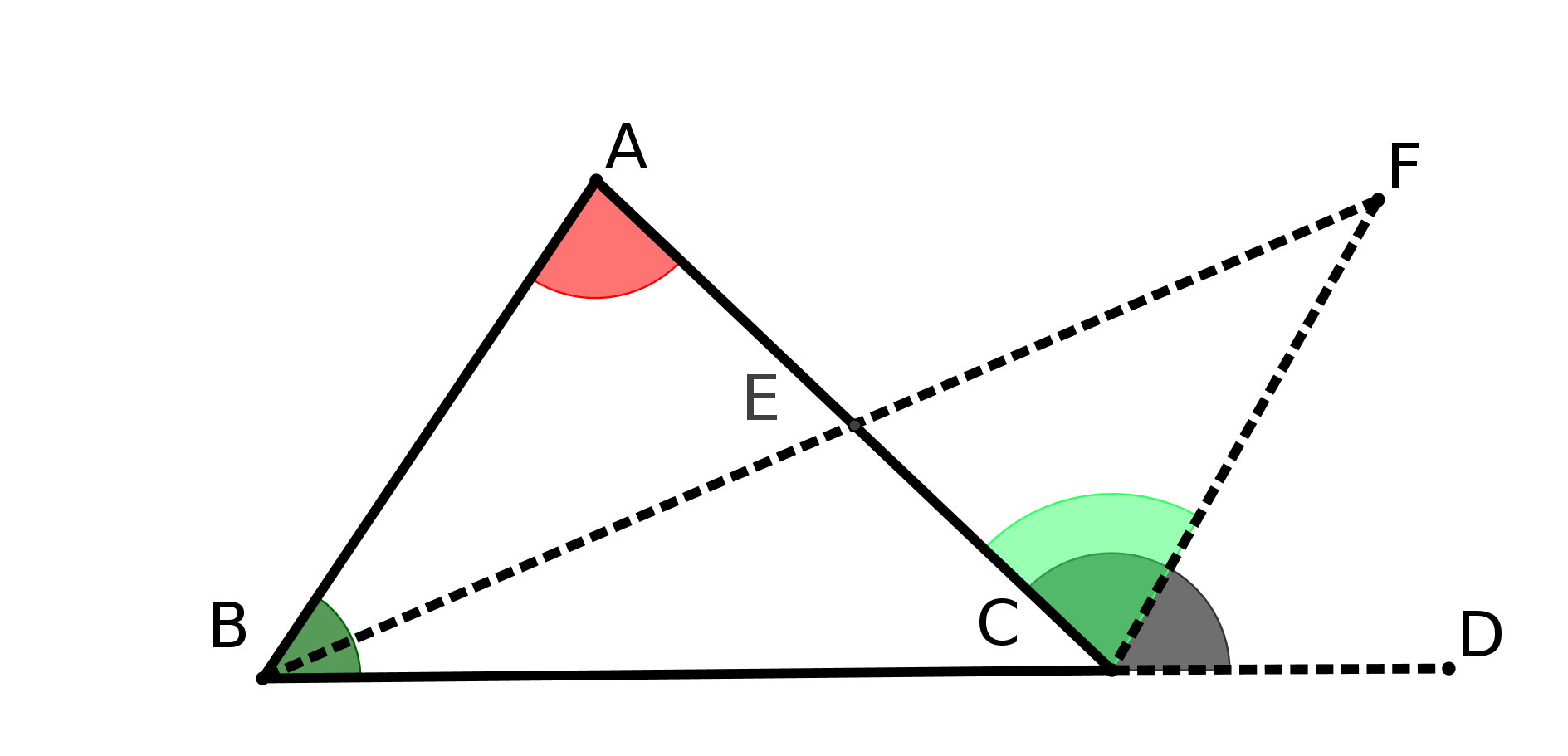
Commentaire : on voit bien que P6 joue un rôle ici important, que ce soit par l’application de th4 ou par le fait que A, C et F ne sont pas alignés.
De plus on peut remarquer que l’on a doublé la longueur de BE : est-ce possible ? P2 nous
permet de "sortir continűment" la droite BE d’elle-męme, mais d’ętre doublée, ce n’est pas
dit.
théorčme 17 :les deux angles d’un triangle, pris de maničre quelconque, sont plus
petits que deux droits.
Commentaire : C’est une conséquence du théorčme précédent donc de P6.
théorčme 18 : dans tout triangle, un plus grand côté sous tend un plus grand
angle.
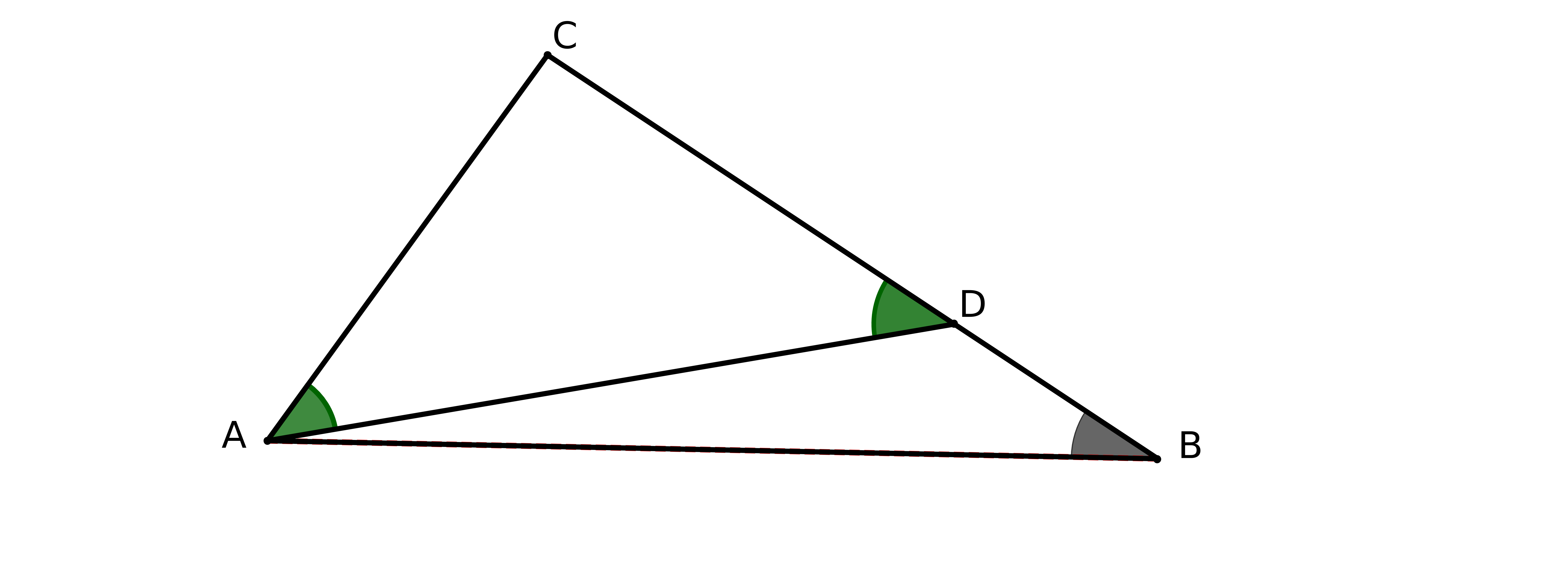
Démonstration : soit ABC un triangle dans lequel . Soit D le point de CB tel que (Th2.1).
Alors (th5.1).
Comme est l’angle extérieur
du triangle ADB on a :
(th.16.1)
commentaire : C’est donc une application de th 16.1 donc de P6.
Théorčme 19 : dans tout triangle, un côté qui sous tend un angle plus grand est
plus grand qu’un côté qui sous tend un angle plus petit.
commentaire : C’est aussi une application de th 16 donc de P6.
Théorčme 20 : dans tout triangle deux des côtés, pris de toute maničre, sont,
ensemble, plus grands que celui qui reste.
commentaire : il s’agit de l’inégalité triangulaire. Nous verrons que sur une sphčre ce n’est pas forcément vrai !
C’est aussi une application de th 16 donc de P6.
Théorčme 21 : si des extrémités d’un côté d’un triangle on construit
intérieurement deux droites, ces deux droites seront plus petites que les deux côtés
restants du triangle mais elles formeront un angle plus grand.
Dans la figure ci-dessous cela signifie que .
Démonstration :
A. 1. Soit E le point d’interchapter de AD et BC (cf commentaire).
2. On a donc (A2) donc donc
3. Et on a .
4. Donc donc
B. La démonstration sur les angles ne pose aucun problčme.
Commentaire : chacune des étapes, 2, 3 ou 4 de la démonstration est justifiée par des axiomes
ou théorčmes démontrés avant le théorčme 21 et dépendent de P6 mais... l’étape 1 n’est pas
justifiée : en effet, aucun postulat, aucun axiome ni aucun théorčme précédent ne permet
d’affirmer que la droite qui joint un sommet ŕ un point intérieur ŕ un triangle coupe le
côté opposé. La droite AD pourrait ętre prolongée continűment sans couper aucun
côté : difficile ŕ imaginer mais pourquoi pas ? Il faudrait poser ce résultat en postulat !
On voit lŕ, malgré toute la volonté de rigueur d’Euclide, qu’il se laisse, que nous nous laissons,
influencer par ce que l’on voit !
Théorčme 22 : ŕ partir de trois droites construire un triangle (deux des droites
étant plus grandes que la troisičme).
théorčme 23 : ŕ partir d’une droite donnée et d’un point de cette droite
construire un angle rectiligne égal ŕ un angle rectiligne donné.
théorčme 24 : si deux triangles ont deux côtés égaux ŕ deux côtés,
chacun ŕ chacun, et s’ils ont un angle plus grand qu’un angle, celui qui est
entouré par les côtés égaux, alors la base est plus grande que la base.
Démonstration : Soient les triangles ABC et DIH tels que , et .
On construit le triangle HDJ égal au triangle ACB (th 22.1).
Alors donc donc .
Mais
donc (th5.1)
donc
donc
(th 19.1).
Commentaire : P6 est lŕ aussi.
Théorčme 25 : si deux triangles ont deux côtés égaux chacun ŕ chacun et une
base plus grande qu’une base alors un angle sera plus grand qu’un angle, celui qui est
sous les côtés égaux.
Commentaire : c’est la réciproque du précédent.
théorčme 26 : si deux triangles ont deux angles égaux, chacun ŕ chacun, et un
côté égal ŕ un côté alors les côtés restants sont égaux, chacun ŕ
chacun.
Théorčme 27 : si une droite tombant sur deux droites fait des angles alternes
égaux, les deux droites sont parallčles.
démonstration : soient deux droites AB et CD coupées par une droite EF tel que .
Supposons que AB et CD se coupent en I. Alors dans le triangle IGF, l’angle extérieur
est égal ŕ
l’angle opposé .
Contradiction avec th16.1. Donc AB et CD sont parallčles.
Commentaire : C’est la premičre fois que l’on rencontre des droites parallčles et leur existence
dépend du théorčme 16.1.
théorčme 28 : si une droite tombant sur deux droites fait extérieurement un angle
égal ŕ l’angle intérieur et opposé ou fait deux angles égaux ŕ deux
droits, ceux intérieurement sur le męme côté, alors les deux droites sont
parallčles.
théorčme 29 : la droite, tombant sur deux droites parallčles, fait extérieurement un
angle égal ŕ l’angle intérieur et opposé et fait deux angles égaux ŕ deux droits,
ceux intérieurement sur le męme côté.
Démonstration : Soit la droite EF coupant les droites AB et CD en G et H.
Supposons que . Alors (A2).
Donc 2 droits.
Donc D’aprčs P5, AB et CD sont sécantes. Contradiction.
Il est facile de démontrer ensuite que 2
droits.
Théorčme 30 : les droites parallčles ŕ une męme droite sont parallčles entre
elles.
Démonstration : 1. On prend deux droites AB et CD parallčles ŕ une męme droite
EF.
2. Soit une droite GI coupant les droites EF et CD. Alors elle coupe aussi AB en H. Euclide ne le démontre pas. GI pourrait-ętre parallčle ŕ AB. L’unicité d’une parallčle ŕ une droite donnée et passant par un point donné n’est pas encore établie ! Une fois de plus, on "voit" que....
3. AB et EF sont parallčles donc (Th 29.1)
. De męme CD
et EF d’oů .
4. Donc
(th29.1) donc .
Donc (Th 28.1) AB et CD sont parallčles.
commentaire : on applique th28.1 et th29.1.
Théorčme 31 : construire une parallčle ŕ une droite donnée et passant par un
point donné.
Démonstration : soit CD une droite et soit A un point. Soit B un point de CD. On construit l’angle égal ŕ l’angle (th23.1). On prolonge EA en F. Alors EF et CD sont parallčles (th27.1).
Commentaire : il n’existe qu’une parallčle, sinon cela contredirait th29.1
Théorčme 32 : un des côtés de tout triangle étant prolongé, l’angle extérieur
est égal aux deux angles intérieurs et opposés. Et la somme des trois angles
intérieurs est égale ŕ deux droits.
Démonstration : On prolonge BC en D. Puis on trace la parallčle ŕ AB passant par C (th 31.1).
On a alors :
et (th
29.1). D’oů le résultat.
Théorčme 34 : les diagonales et les côtés opposés d’un parallélogramme sont
égaux et leurs diagonales se coupent en leur milieu.
Les autres théorčmes du livre 1 nous intéressant moins, nous ne les citerons pas. Par contre la
définition 1 et le théorčme 18 du livre 6 nous intéressent.
définition 1 : des figures rectilignes semblables sont celles qui ont les angles égaux deux ŕ
deux et les côtés, qui entourent les angles égaux, proportionnels.
théorčme 18 : sur une droite donnée construire un quadrilatčre semblable ŕ un quadrilatčre donné.
Remarque : ce théorčme s’applique bien entendu pour un triangle et nécessite P5.
Donnons un exemple de géométrie oů P5 n’est pas vérifié et oů il n’existe pas forcément de triangles semblables.
Soit une sphčre de rayon R et de centre O. si on prend deux points de cette cette sphčre, il
passe un cercle de centre O de rayon R ( appelé géodésique ou grand cercle).
Chaque grand cercle est déterminé par deux quelconques de ses points.
On peut démontrer que, si on se munit de la distance euclidienne dans l’espace, la distance la
plus courte entre deux points A et B de la sphčre est la longueur du plus petit arc du grand
cercle passant par A et B. On peut s’en rendre compte facilement en coupant la sphčre
suivant un grand cercle joignant A et B et de voir que tout autre chemin de A ŕ B est plus
grand.
Démontrons ce résultat :
Faisons un rappel sur les coordonnées sphériques : soit un repčre orthonormal . Alors un point M aura pour coordonnées sphériques :.
et pour coordonnées cartésiennes : (on pose
),
, ,
Donnons nous deux points A et B de la sphčre et cherchons le plus court chemin ( toujours de classe C1)les reliant. Sans perdre de généralité on peut supposer que A et B ont pour coordonnées sphériques :
et .
Alors un chemin AB sur la sphčre aura pour représentation paramétrique :
=
avec et
.
les fonctions
et
étant dérivables et de dérivées continues sur [0 ; 1] telles
que :.
Alors on démontre que la longueur, du chemin est égale ŕ :
Calculons :
Si
alors .
Alors, aprčs calcul, on trouve :
Donc :
Donc :
Et
est la longueur de l’arc de cercle AB, correspondant ŕ l’angle
.
Ainsi un arc de grand cercle est bien le chemin le plus court d’un point ŕ un autre, c’est donc
l’équivalent sur la sphčre de la ligne droite sur le plan.
On appellera donc, sur la sphčre,"droite" tout arc de grand cercle. A partir de ces"droites" on
pourra construire des triangles et, plus généralement, des polygones, des cercles donc les figures que
l’on peut construire dans le plan.
Soient deux demi- grands cercles se coupant en deux points E et M. Un angle de deux droites
sera l’angle défini par les tangentes ŕ ces droites. Ces deux demi-cercles constituent un
fuseau.
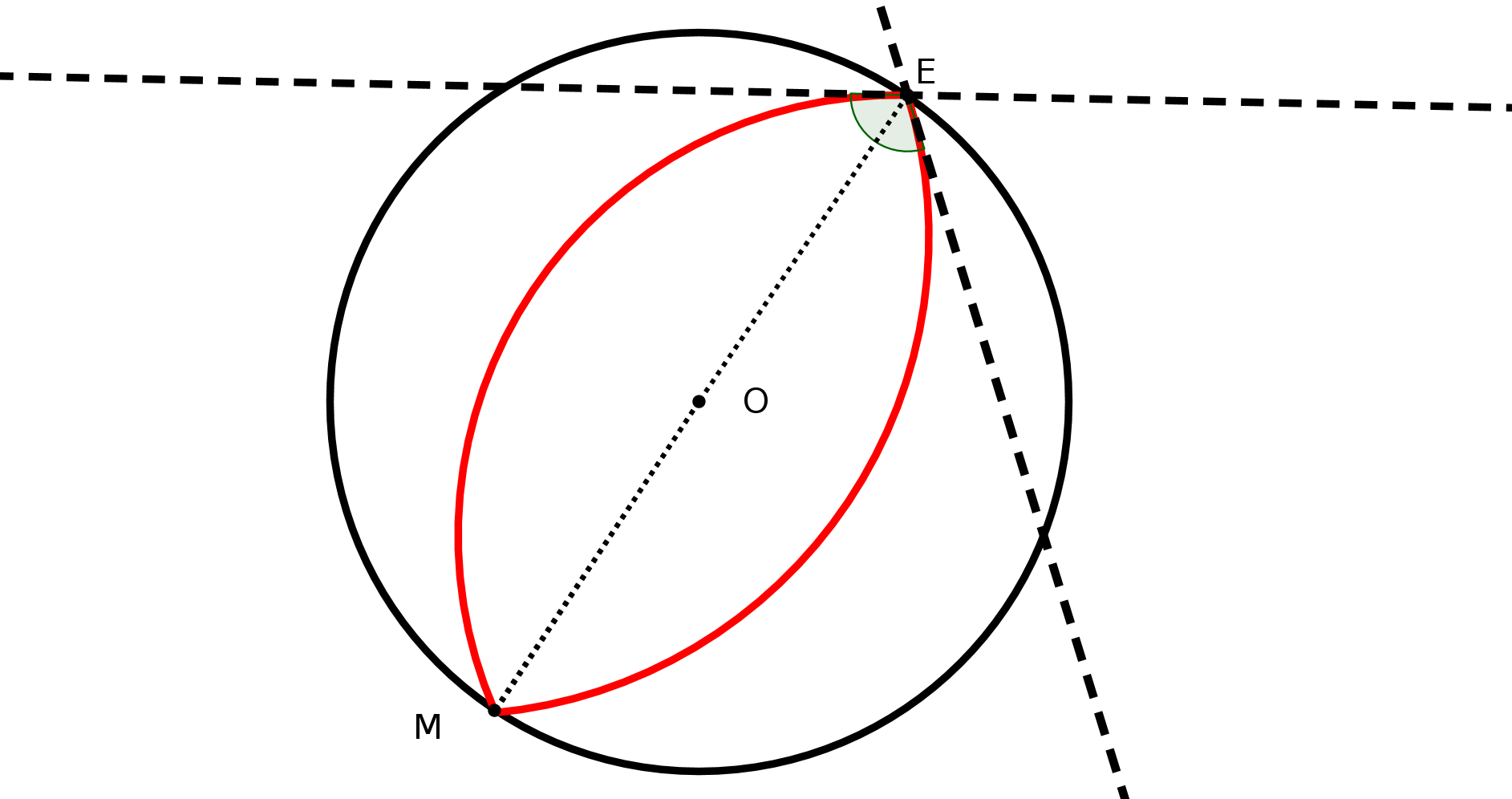
Dans ce qui suit on considčre une sphčre de rayon 1.
Démontrons que si un angle d’un fuseau est
alors l’aire du fuseau est
2. En effet la sphčre a pour
surface 4 et correspond
ŕ un angle de 2.
D’oů le résultat.
Nous avons donc défini les notions de droites et d’angle sur la sphčre.
Notre géométrie sur la sphčre présente trois inconvénients : tout d’abord,si deux points sont diamétralement opposés, il y a une infinité de grands cercles (donc de droites) passant par ces deux points donc deux droites formant un fuseau pourront entourer un domaine, donc le sixičme postulat ne sera pas vérifié.
Ensuite un grand cercle ne peut pas se prolonger de maničre continue autant que l’on veut, donc le deuxičme postulat d’Euclide n’est pas non plus vérifié.
Pour éviter le premier inconvénient on appellera point toute paire de points diamétralement opposés.
Les droites seront toujours les grands cercles.
Ainsi quels sont les postulats vérifiés ?
1. Par deux points passe une droite. (Postulat 1)
2. On ne peut pas prolonger autant que l’on veut une droite puisqu’elle est finie. Donc le Postulat 2 n’est pas vérifié.
3. On sait tracer un cercle. (Postulat 3)
4. Tous les angles droits sont égaux. (Postulat 4)
6. Deux droites peuvent entourer un domaine. Donc le Postulat 6 n’est pas vérifié.
Ceci a pour conséquences, en particulier, que le théorčme 4 d’Euclide n’est pas vrai et qu’il n’y
a pas de droites parallčles car deux grands cercles ont toujours un point commun.
Démontrons maintenant le théorčme suivant : la somme des angles d’un triangle, d’angles
,
et
et d’aire T est
égale ŕ +T.
cf ŕ la figure suivante :
On pose EFH=,FHE=,
HEF=.
Démontrons que
=+++.
Soit S’ la demi-sphčre contenant E et limitée par le grand cercle (FH). Alors S’ a pour aire
2.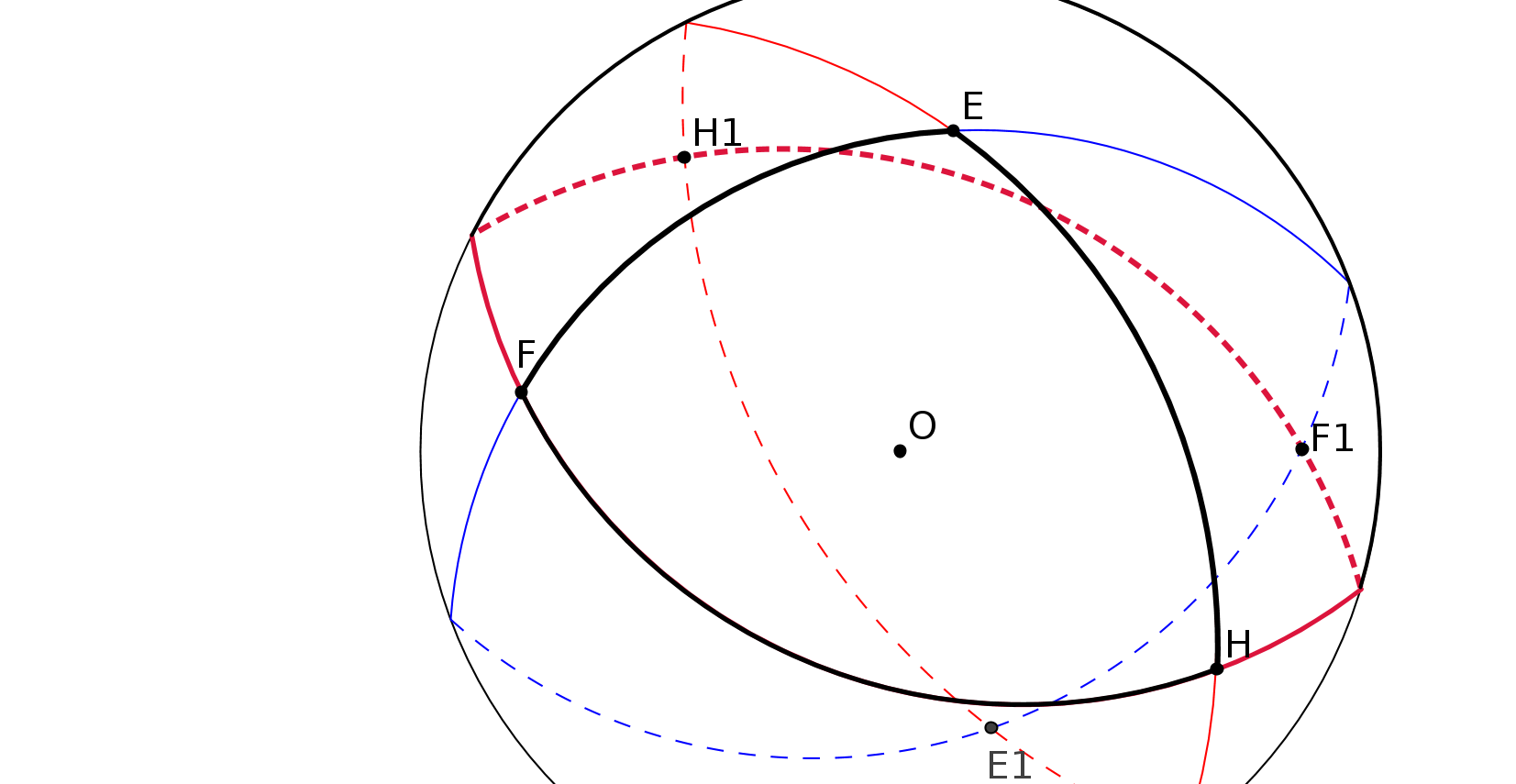
Mais S’ est la réunion du fuseau de sommets F et F1 et contenant le triangle EFH
et du complémentaire du triangle EFH dans le fuseau de sommets H et H1 contenant le triangle
EFH
et du complémentaire du triangle E1F1H1 dans le fuseau de sommets E et E1 et contenant le
triangle E1F1H1, triangle de męme aire que EFH par symétrie.
Donc 2=2+2-T+2-T.
Donc +T=++.
Ainsi, la somme des angles d’un triangle sur une sphčre est supérieure ŕ
.
On peut remarquer que, aussi, que la somme des angles dépend de l’aire du triangle.
Dans la géométrie euclidienne la somme des angles est égale ŕ
2 et
c’est une conséquence de P5 ! Donc si, sur la sphčre, ce n’est pas vrai, P5 serait faux sur la
sphčre ! Or, sur la sphčre, deux droites quelconques sont sécantes, donc P5 est vrai ! Donc tout
simplement parce que le théorčme : la somme des angles dans un triangle est égale ŕ
2, ne
dépend pas que de P5.
Y a-t-il des triangles semblables sur une sphčre ?
Deux triangles sont semblables s’ils ont des angles égaux 2 ŕ 2 ou encore si leurs côtés sont
proportionnels.(Définition 1 livre 6)
Soient donc deux triangles ABC et A’B’C’ non égaux. On les suppose semblables et par
déplacement on peut supposer que les points A et A’ sont confondus.
Prenons donc deux triangles qui ont leurs angles égaux deux ŕ deux.
Posons ==
, ==
et ==.
Si les deux triangles ont les męmes angles alors la somme de leurs angles est la męme donc , T et T’ étant leurs aires respectives. Donc . Ce qui n’est pas possible.
Donc s’il existe des triangles semblables cela ne peut pas ętre par rapport ŕ leurs angles.
On peut supposer que B’ est sur AB, C’ sur AC. On aura donc une figure du type :
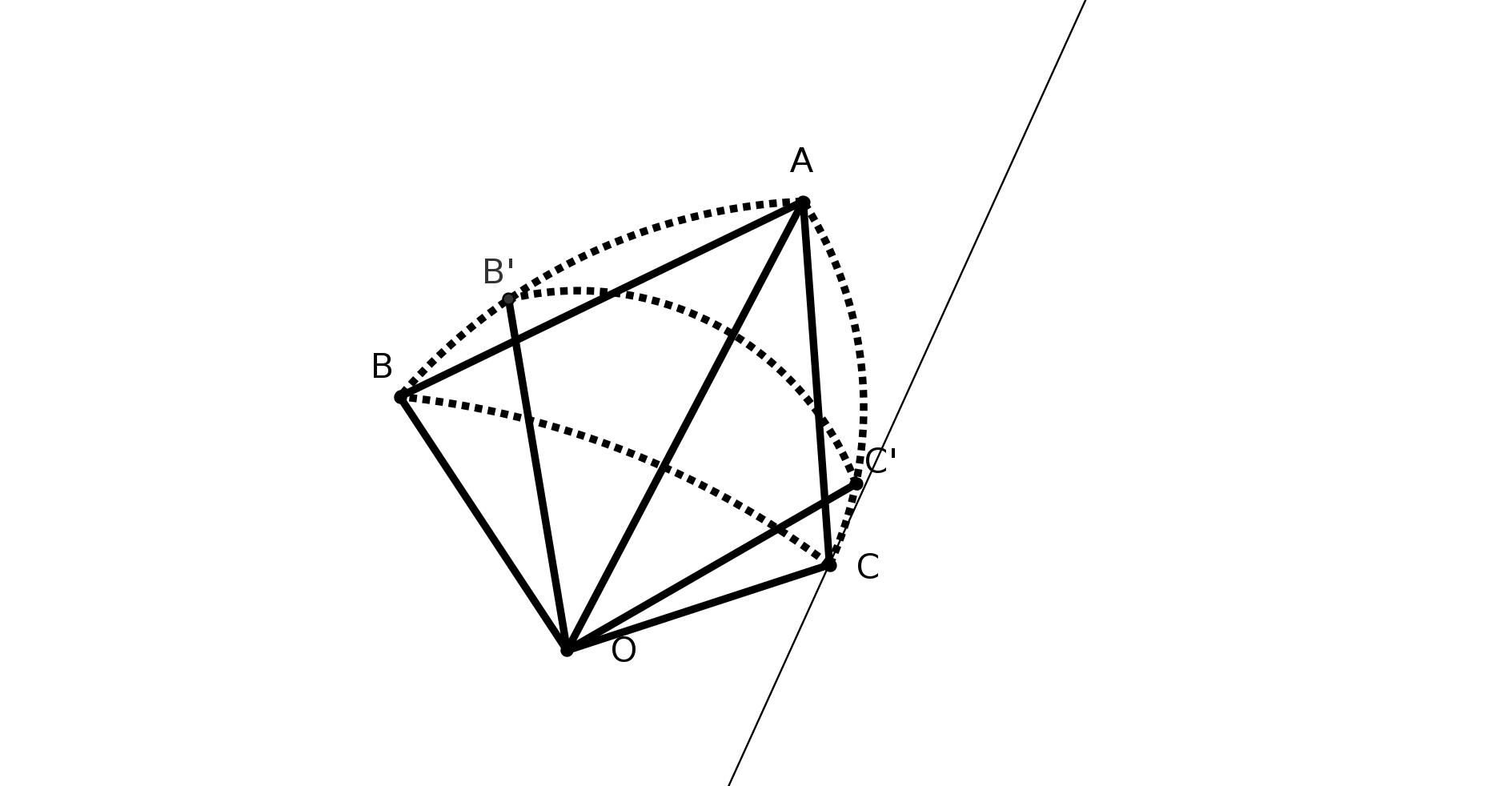
Prenons deux triangles, ABC et A’B’C’, qui ont leurs côtés proportionnels.
Par déplacement on peut supposer que B’ est sur AB. Rappelons
que, la sphčre étant de rayon 1, la longueur de l’arc AB est égale ŕ
en
radians. Posons dans la figure suivante :
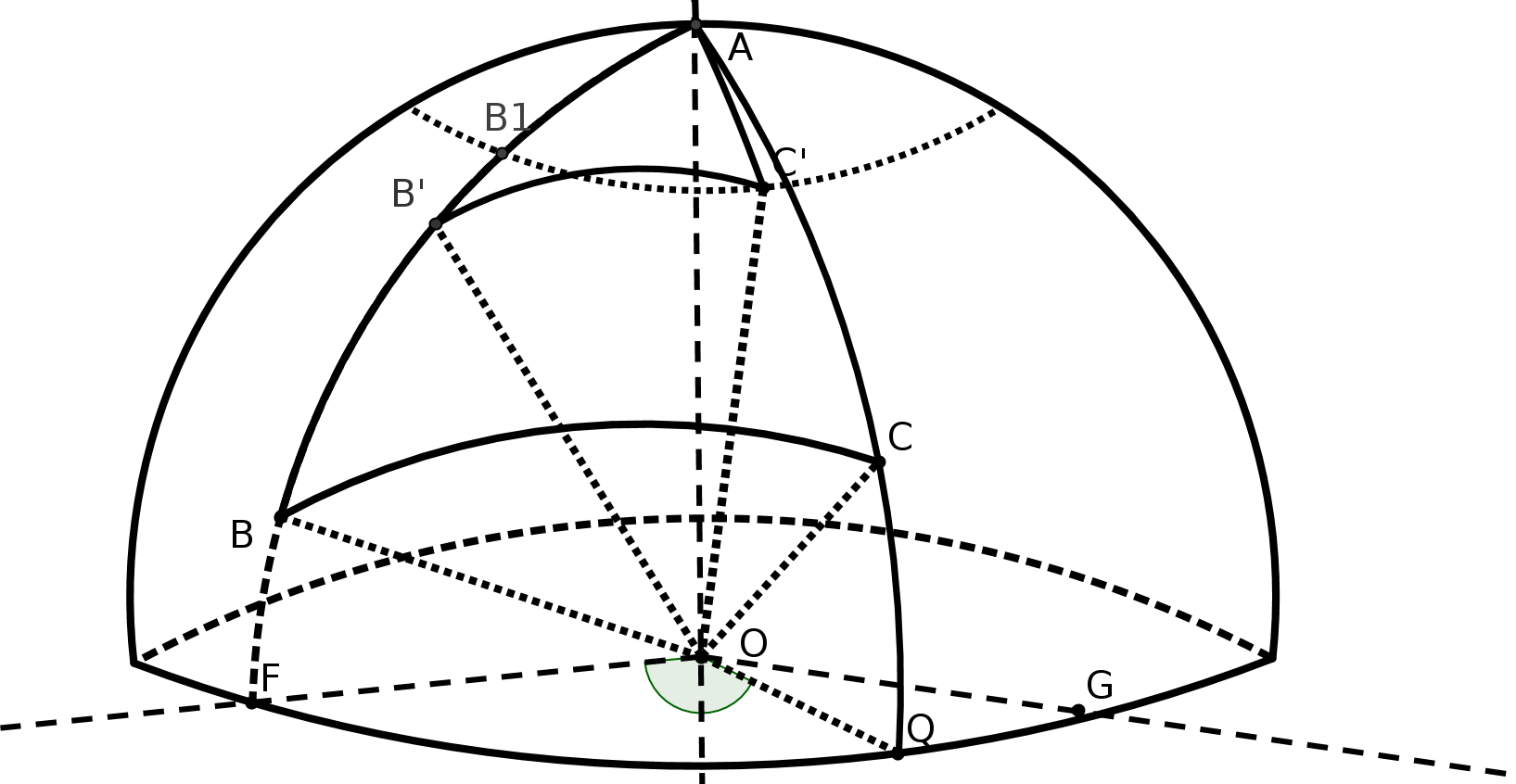
et , et , et et
Supposons les côtés AB’ et AC’ proportionnels aux cotés AB et AC, c’est ŕ dire supposons qu’il existe un réel tel que et .
Les côtés BC et B’C’ sont-ils dans le męme rapport, comme cela serait le cas en géométrie euclidienne ? C’est ŕ dire a-t-on ?
Traitons l’exemple suivant : ,
et
. On a
donc et
et on a
la figure suivante :
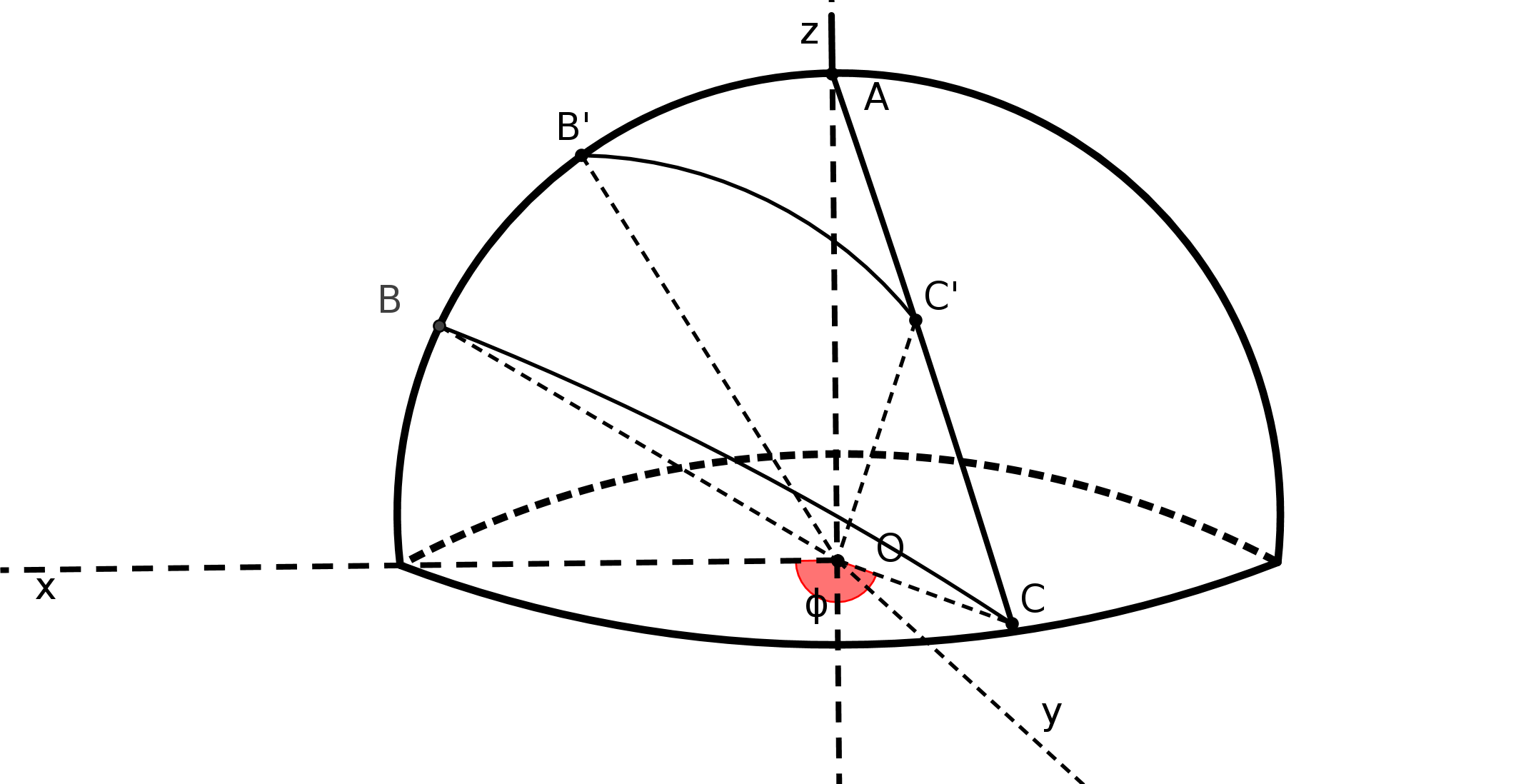
Les coordonnées de B, B’, C et C’ sont
B(, 0, )
B’(, 0, )
C ( cos(), sin(),0) et
C’(cos(),
sin(),).
On et
.
Si les deux triangles ont leurs côtés proportionnels on devrait avoir ou encore, puisque ,
.
Aprčs calculs on obtient : cos()=1 ou cos()=-1. Mais dans ces deux cas le triangle ABC n’existe pas donc, pour tout modulo , .
Ainsi aucun triangle n’est semblable au triangle ABC dans le rapport
.
La similitude des triangles ne peut-ętre définie dans la géométrie de la sphčre
On voit donc une fois de plus que l’on n’est plus dans le cadre de la géométrie euclidienne.
Rappelons que Posidonius, pour démontrer P5, changeait la définition des droites parallčles en
affirmant que deux droites sont parallčles si et seulement si elles sont équidistantes.
Tout d’abord comment définir cette notion d’équidistance avec les éléments d’Euclide ?
a) Définissons d’abord la notion de distance d’un point ŕ une droite
Soit M un point et AB une droite.
Le Th12.1 nous permet d’affirmer l’existence de la perpendiculaire ŕ AB passant par M. Soit MP
cette perpendiculaire.
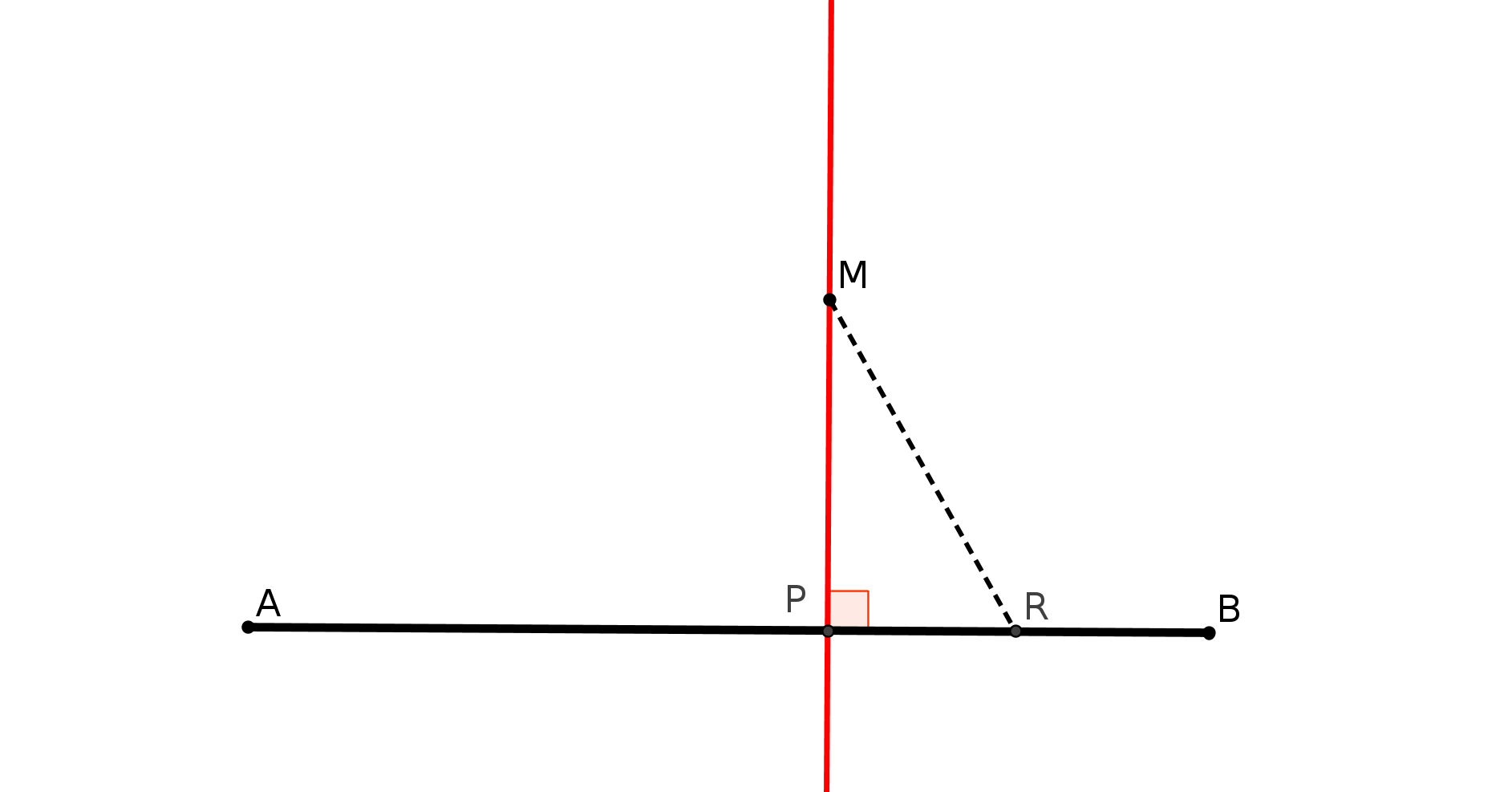
Soit R un point de AB distinct de P. D’aprčs Th16.1 l’angle MPA est plus grand que chacun des angles intérieurs et opposés du triangle MPR.
Ainsi, d’aprčs Th18.1, MR est plus grand que MP
On appellera distance de M ŕ AB la droite MP.
b)Définition de Posidonius
Soient deux droites AB et CD. AB est parallčle ŕ AB lorsque, pour tous points, M et N, de AB.
les perpendiculaires, MP et NQ ŕ CD sont égales.
c) Supposons que deux droites AB et CD sont parallčles au sens de Posidonius. Peut-on en
déduire P5 ?
Soient donc deux points, M et N, de AB et les perpendiculaires, MP et NQ ŕ AB.
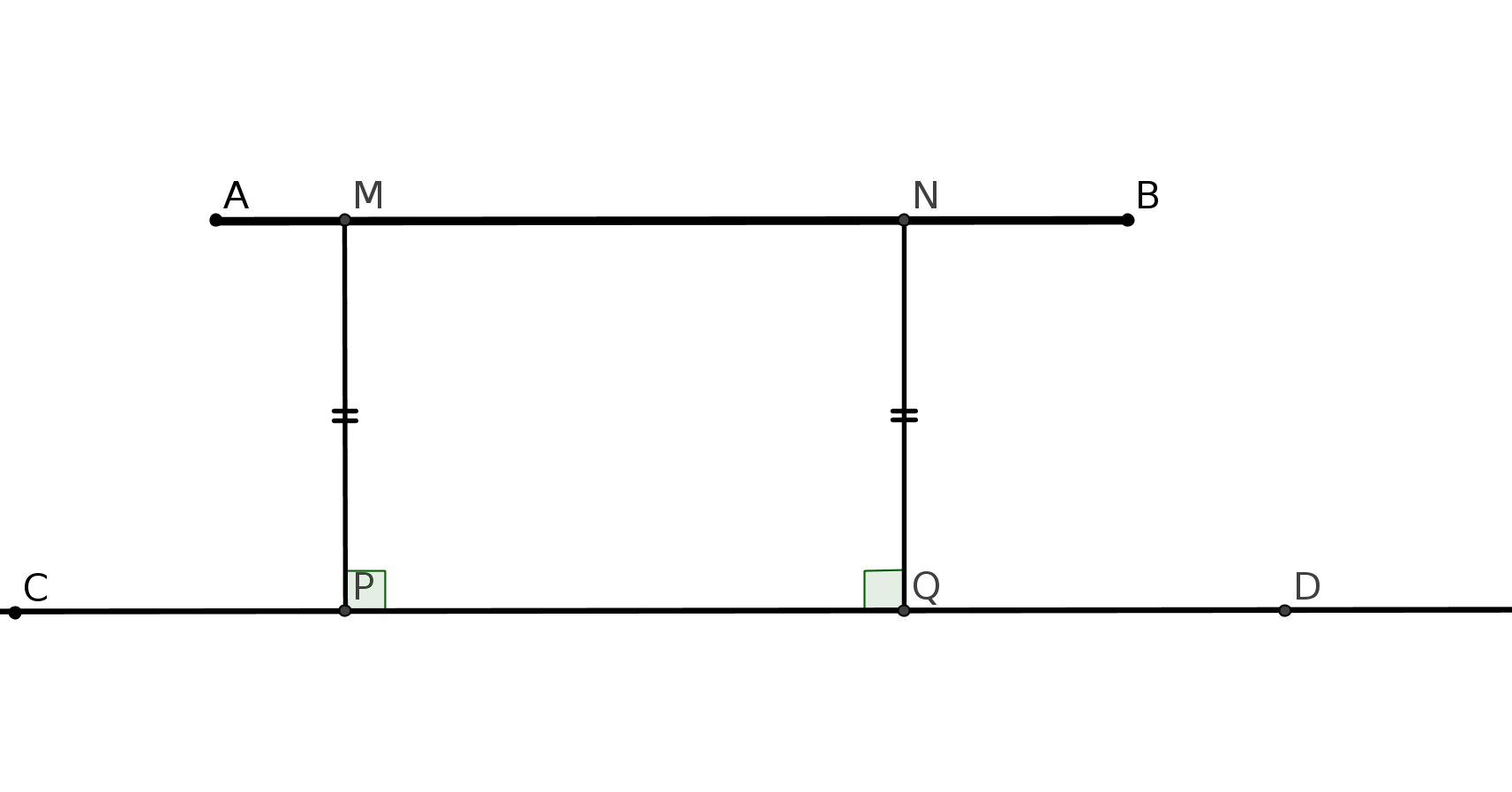
Ainsi on obtient un quadrilatčre MNQP qui a deux angles droits et deux côtés égaux. C’est
le rectangle de Saccheri. On ignore si les deux autres angles sont droits.
On va voir avec Saccheri que l’on ne peut déduire P5 que si les quatre angles sont droits. Mais alors,
si les quatre angles sont droits, cela signifie que dans la définition de l’équidistance, on doit
admettre que des droites parallčles sont des droites qui admettent des perpendiculaires communes et
que toutes ces perpendiculaires communes sont égales.
Or dans les Eléments d’Euclide, ce résultat est une conséquence de P5.
On voit donc, qu’avec sa définition, Posidonius ne peut pas démontrer P5. Soit elle est
insuffisante soit elle contient déjŕ P5.
d) Enfin, si deux droites sont parallčles au sens d’Euclide, elles sont équidistantes si on admet
P5. C’est une conséquence du Th34.1.
Al Jawhari remplace P5 par l’énoncé suivant, que l’on nommera PJ :
par un point quelconque situé ŕ l’intérieur d’un angle, il est possible de tracer une ligne coupant ses deux côtés. Puis il se propose de démontrer P5. Mais on peut prouver que les deux énoncés sont équivalents.
Il pense que son énoncé est indépendant de P5 et qu’il ne dépend que de des postulats autres
que P5. Ainsi, pour lui, il fait partie de ce que l’on appelle la géométrie neutre. Nous allons voir
que c’est faux !
Soient deux droites AT et ME coupant la droite MT telles que A et E sont du męme
côté de MT et tels que la somme des angles qu’elles font avec MT est inférieure ŕ deux
droits.
Rappelons P8 postulat que nous avons rajouté et qui postule que la droite joignant deux points,
situés de part et d’autre d’une męme droite, coupe cette droite.
Si M et E ne sont pas du męme côté de AT alors ME coupe AT et c’est fini.
Supposons que M et E sont du męme côté de AT.
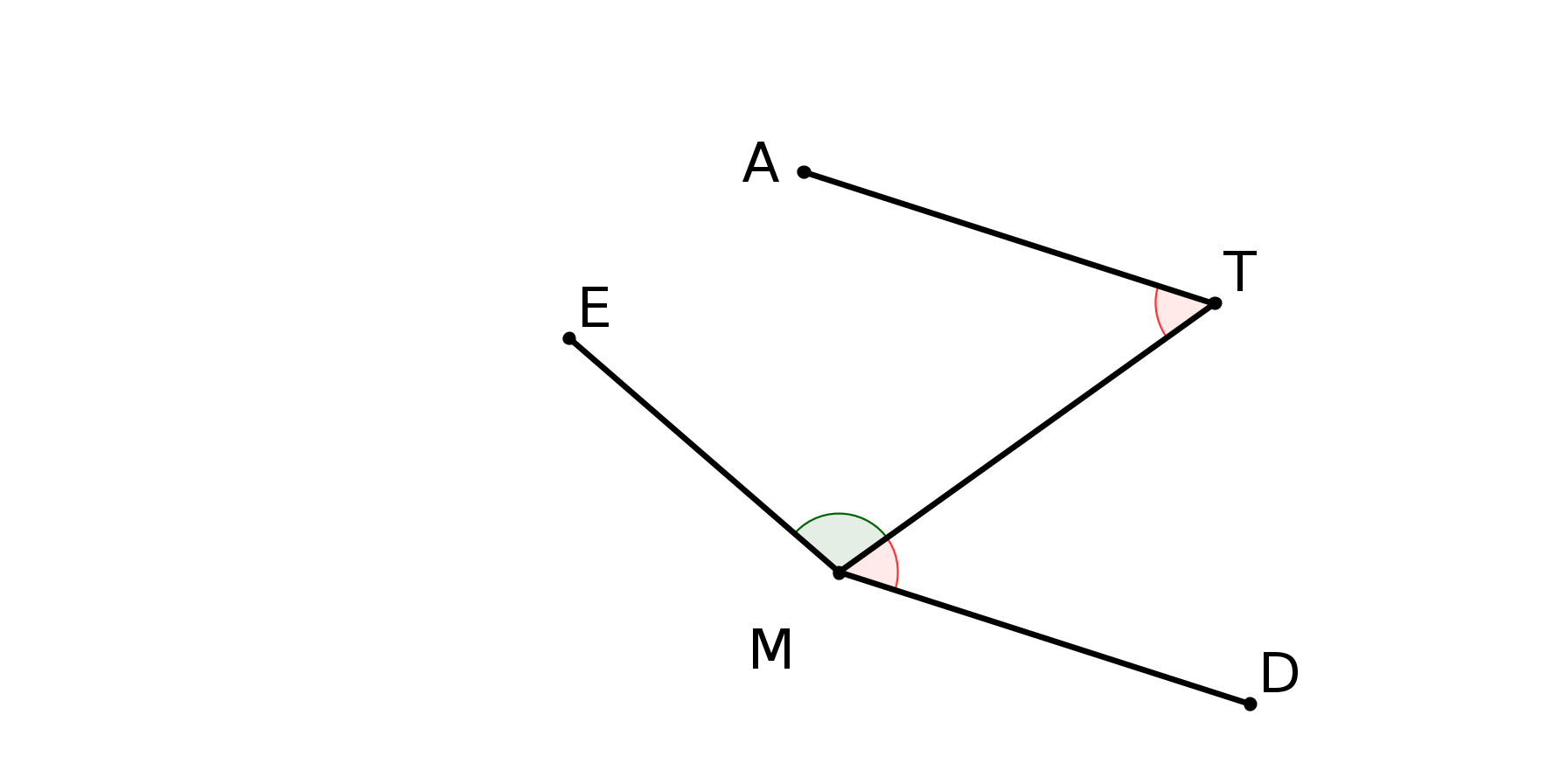
Le th23.1 nous permet de construire, ŕ partir de la droite MT et du point M, le point D
tel que A et D sont de part et d’autre de TM et tels que les angles ATM et TMD sont
égaux.
Les angles ATM et TMD étant égaux le th27.1 implique que les droites DM et AT sont
parallčles.
La somme des angles EMT et TMD étant inférieure ŕ deux droits, EM et DM forment un
angle et T est ŕ l’intérieur de cet angle.
PJ implique qu’il existe une droite passant par T et coupant MD et ME respectivement en K et
L.
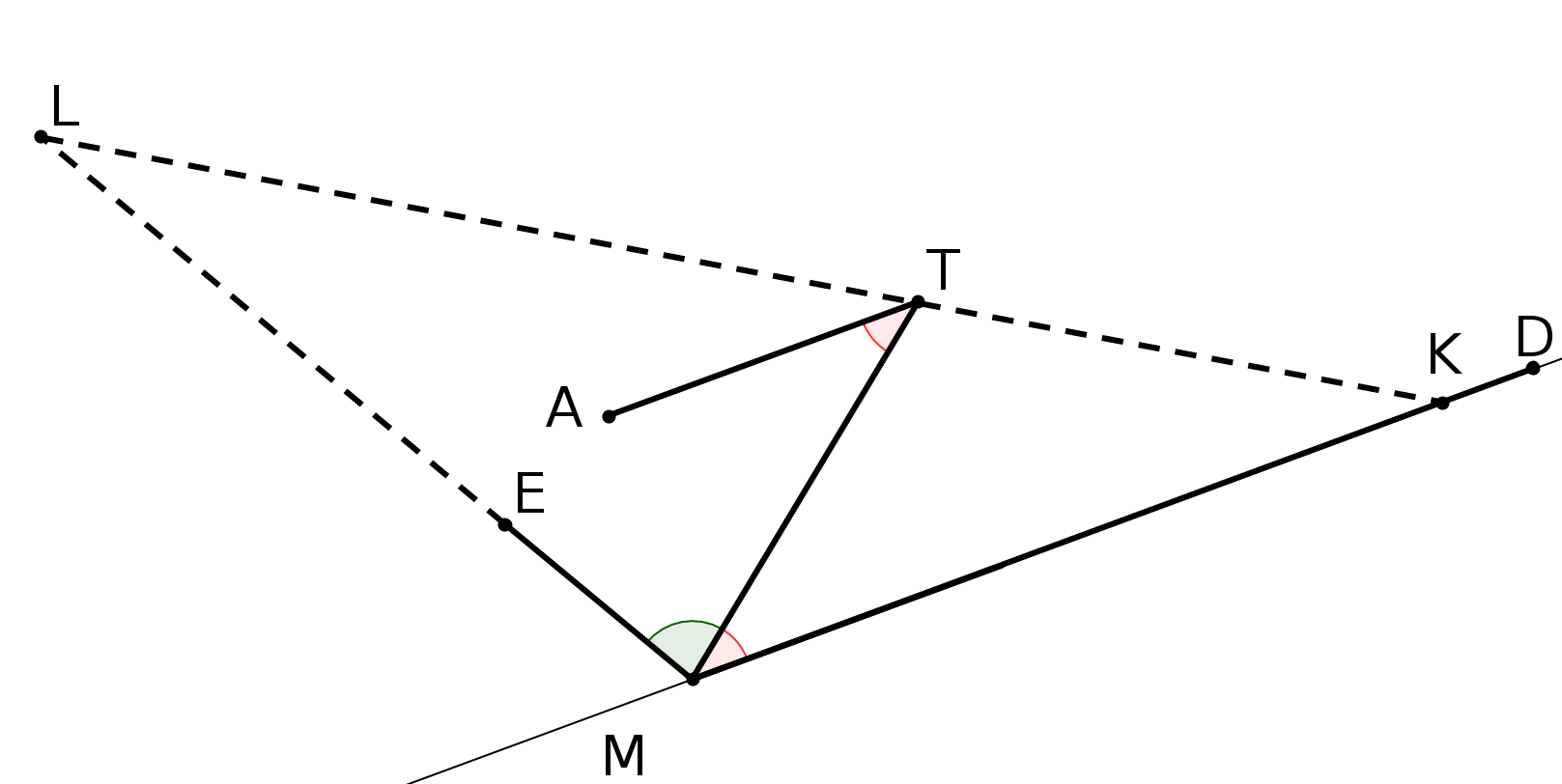
L et E sont du męme côté de MT. Sinon, L serait sur KT, donc, d’aprčs P8, ME couperait MT, en un autre point que M, donc MT serait distincte de MT avec deux points commun : impossible d’aprčs P6.
MD étant parallčle ŕ AT, M et D étant du męme côté de AT, K l’est aussi.
Donc KT coupe AT et K et L sont de part et d’autre de AT. Il en est donc de męme de E et L, donc EL coupe AT, donc ME et AT se coupent.
Tout d’abord P5 implique PJ. En effet soit un angle BOC et un point A ŕ l’intérieur de cet angle.
On prend deux points D et E, D sur OB et E sur OC. On trace DE puis la parallčle (d) ŕ DE passant par A.
Si (d) est parallčle ŕ OB alors il existerait deux parallčle ŕ (d) passant par D : la droite DE et la droite OB. Or d’aprčs P5 il n’existe qu’une seule parallčle ŕ une droite donnée. Donc (d) coupe OB. De męme (d) coupe OC. Ainsi PJ est démontrée.

Mais pourrait-on démontrer PJ sans P5 ?
On prend, comme précédemment, un angle BOC et un point A ŕ l’intérieur de cet angle.
Dire qu’il existe une droite passant par A coupant OB et OC revient ŕ dire qu’il existe un point D de OC tel que la droite DA coupe OB.
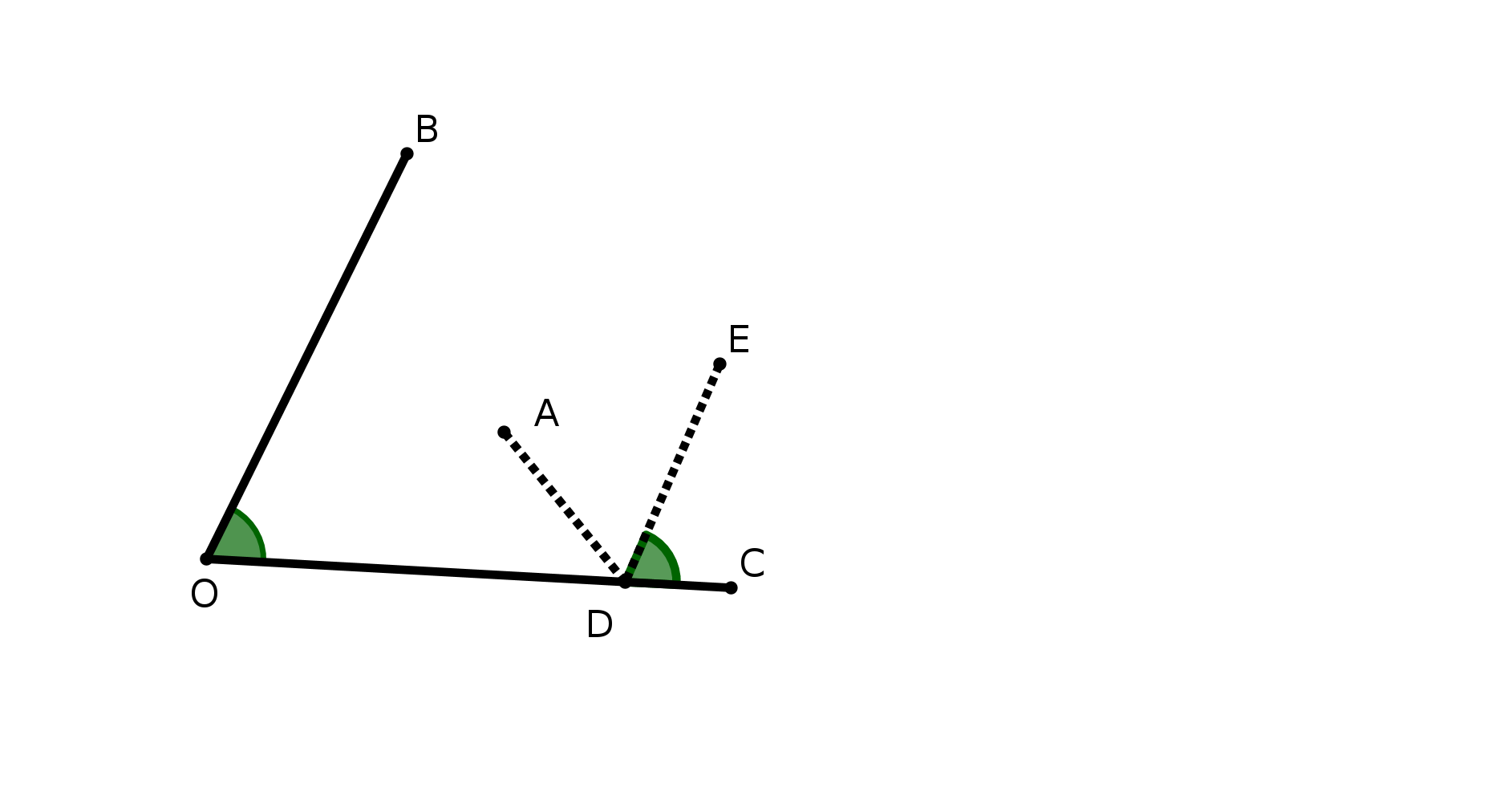
On trace l’angle EDC égal ŕ l’angle BOD (the 23.1). Donc DE et OB sont parallčles (the
28.1). Pour ętre sűr que AD coupe OB il faut pouvoir affirmer que par D il n’existe pas
deux parallčles ŕ OB. Ceci est une conséquence de P5. On ne peut pas s’en passer !
Ainsi PJ, n’étant qu’une conséquence de P5, n’est pas une piste intéressante.
Comment se fait-il que Al Jawhari n’ait pas vu sa faute alors que par ailleurs c’était un grand savant ? Sans doute ne pouvait-on pas penser, ŕ cette époque, qu’il était possible de concevoir deux droites sécantes parallčles ŕ une męme droite.
Al Khayyam remplace P5 par l’énoncé suivant (1), qu’on appellera PK :
deux droites concourantes se coupent et il est impossible qu’elles s’écartent l’une de l’autre dans la direction oů elles concourent.
Cet énoncé ne dit pas autre chose que P5 ! et naturellement Al Khayyam en déduit que deux droites perpendiculaires sont équidistantes.
Cependant sa démarche est intéressante parce qu’il va démontrer P5 par l’absurde et poser des hypothčses qui serviront pour créer des géométries non euclidiennes.
Rappelons que le théorčme 4.1 nous permet d’affirmer que deux triangles, ayant un angle égal entourés par deux côtés égaux, sont égaux.
Rappelons aussi que les th.10.1 et 11.1 nous permettent de tracer des perpendiculaires et que le
th13.1 nous permet d’affirmer qu’une droite coupant une autre fait soit deux angles droits, soit deux
angles, qui réunis, font deux droits.
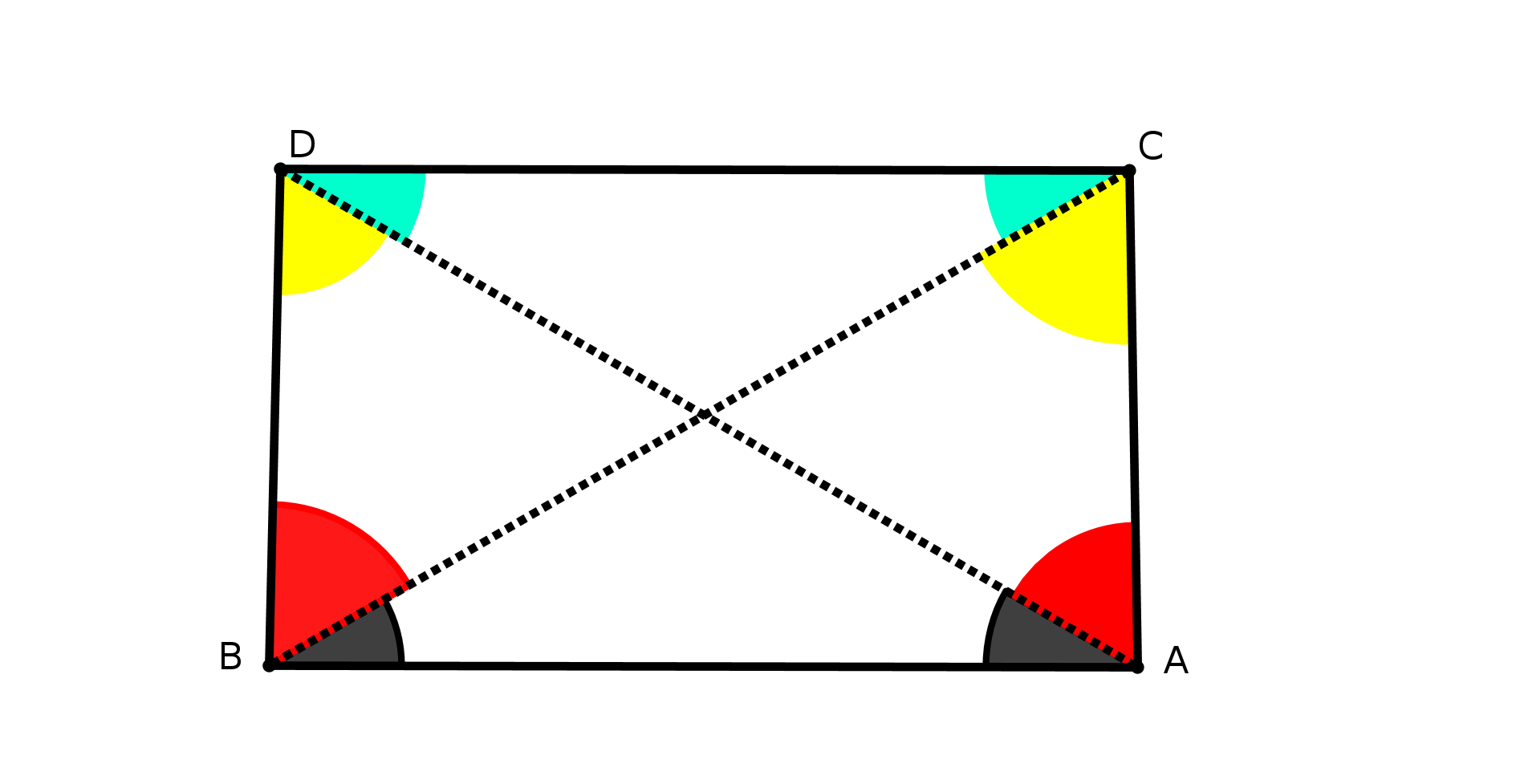
Il construit la droite AB puis il mčne les perpendiculaires BD et AC, (th11.1), telles que
BD=AC.
Pour nous il est évident que ce quadrilatčre est un rectangle. Cependant cette "évidence" est
une conséquence de P5, dans les éléments d’Euclide. Donc Al Khayam ne l’admet
pas.
Il commence par démontrer que les angles BDC et ACD sont égaux.
Voici une démonstration possible :
1. On a , , DB^A=CÂB donc (th4.1) .
2. On démontre de męme que les triangles DAC et CDB sont égaux donc leurs angles sont égaux deux ŕ deux (th4.1).
3. On en déduit que les angles BDC et ACD sont égaux.
Puis Al Khayyam élčve la perpendiculaire ŕ AB en son milieu E (th 10.1 et th 11.1) et il
démontre que EG est perpendiculaire ŕ CD et que G est le milieu de CD.
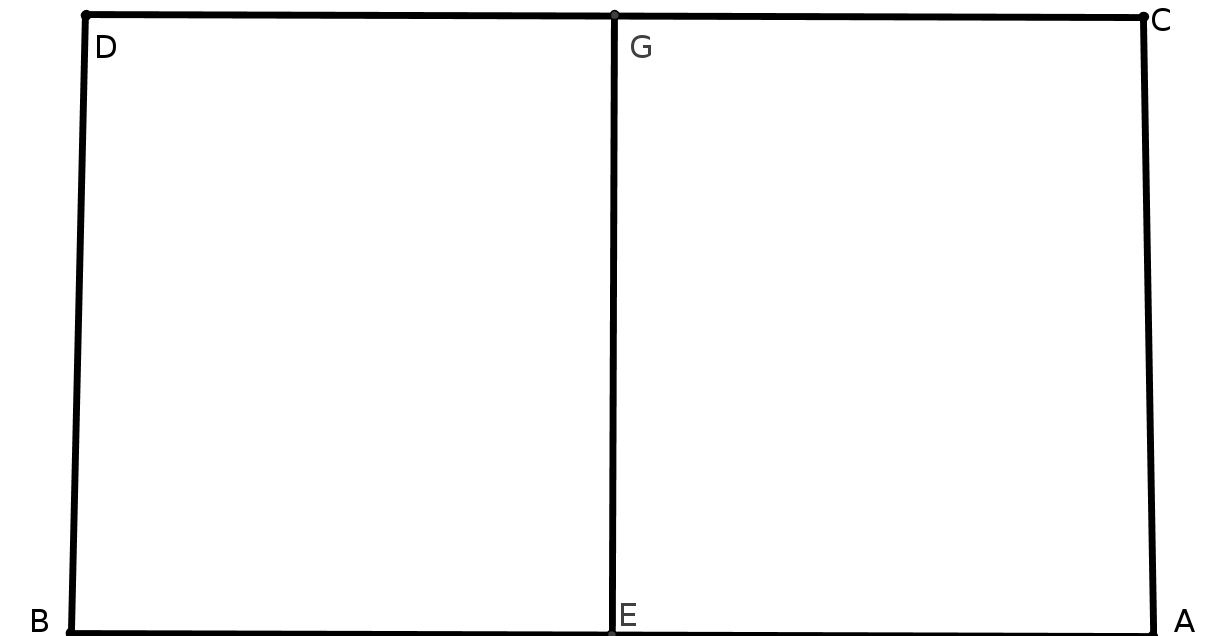
Voici une démonstration possible :
1. On démontre que les triangles BGE et AGE sont égaux (th 4.1). En effet : , et droit. Donc BG=AG.
2. Puis que les triangles BDG et CGA sont égaux.
En effet : , et puisque
. Donc (th26.1 : deux angles et un côté égaux) les triangles sont égaux. Donc DG=GC. Donc G est le milieu de CD.
3. On en déduit donc que les angles DGE et CGE sont égaux . Donc (th13.1) GE est
perpendiculaire ŕ CD.
Puis Al Khayyam prolonge EG jusqu’au point K tel que EG=GK.
Puis il trace la perpendiculaire ŕ EK qui coupe les droites BD et AC quand on les prolonge. Il obtient cette figure.
Pour tout un chacun il est évident que la perpendiculaire ŕ EK coupe BD et AC mais, sans P5,
rien dans Euclide ne permet de l’affirmer. On pourrait dire que selon PK, les droites se rapprochant
elles se coupent....
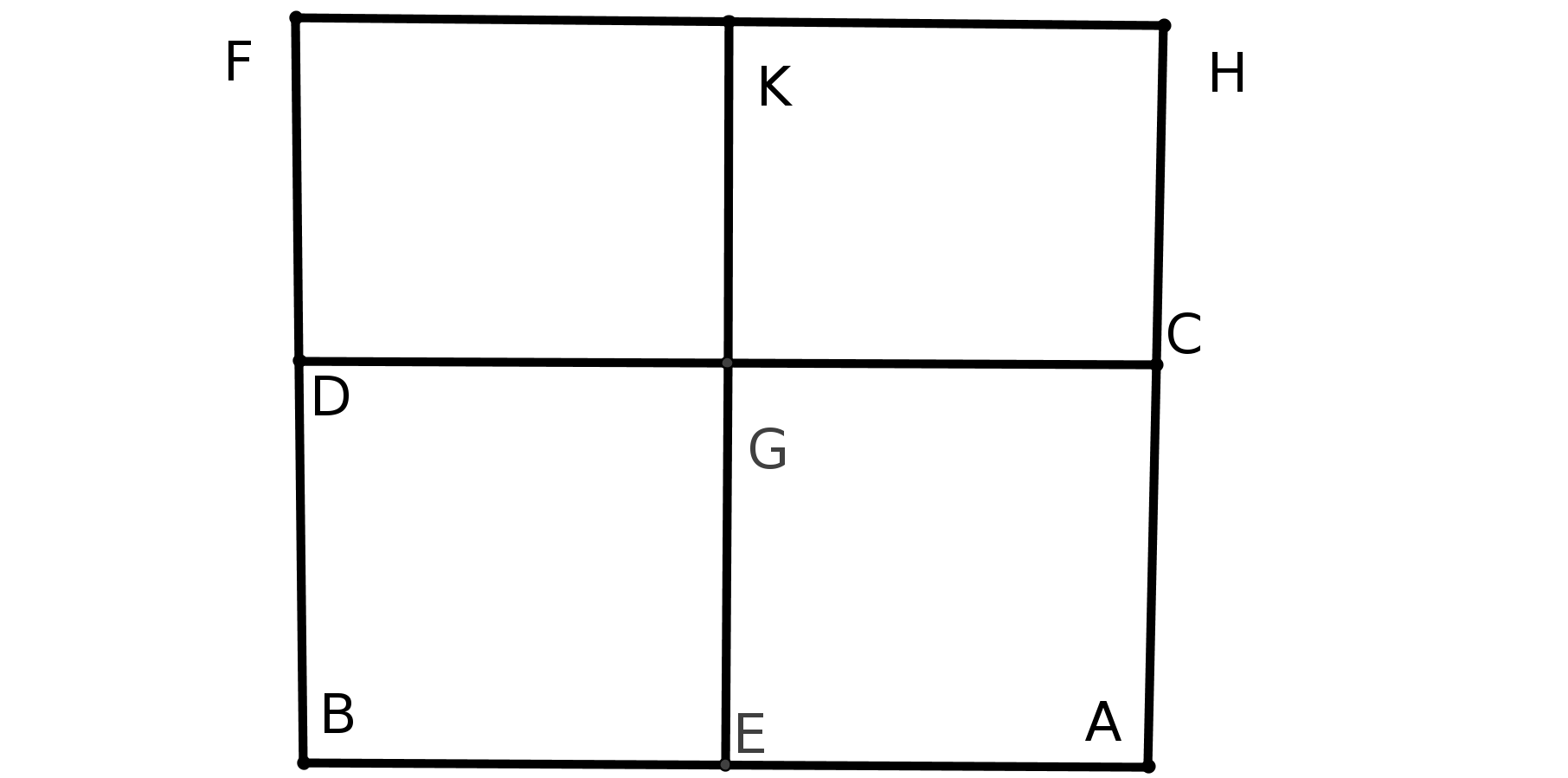
Puis Al Khayyam fait les trois hypothčses suivantes :
1. H1 : les angles C et D sont aigus.
2. H2 : les angles C et D sont obtus.
3. H3 : les angles C et D sont droits.
Puis il plie la figure suivant CD, ce qui revient ŕ faire une symétrie orthogonale (mais la notion de transformation n’existe pas encore). On ne détaillera pas mais on peut justifier la figure obtenue par pliage ŕ l’aide d’Euclide sans P5.
Sous H1 on obtient la figure suivante : naturellement elle est déformée !
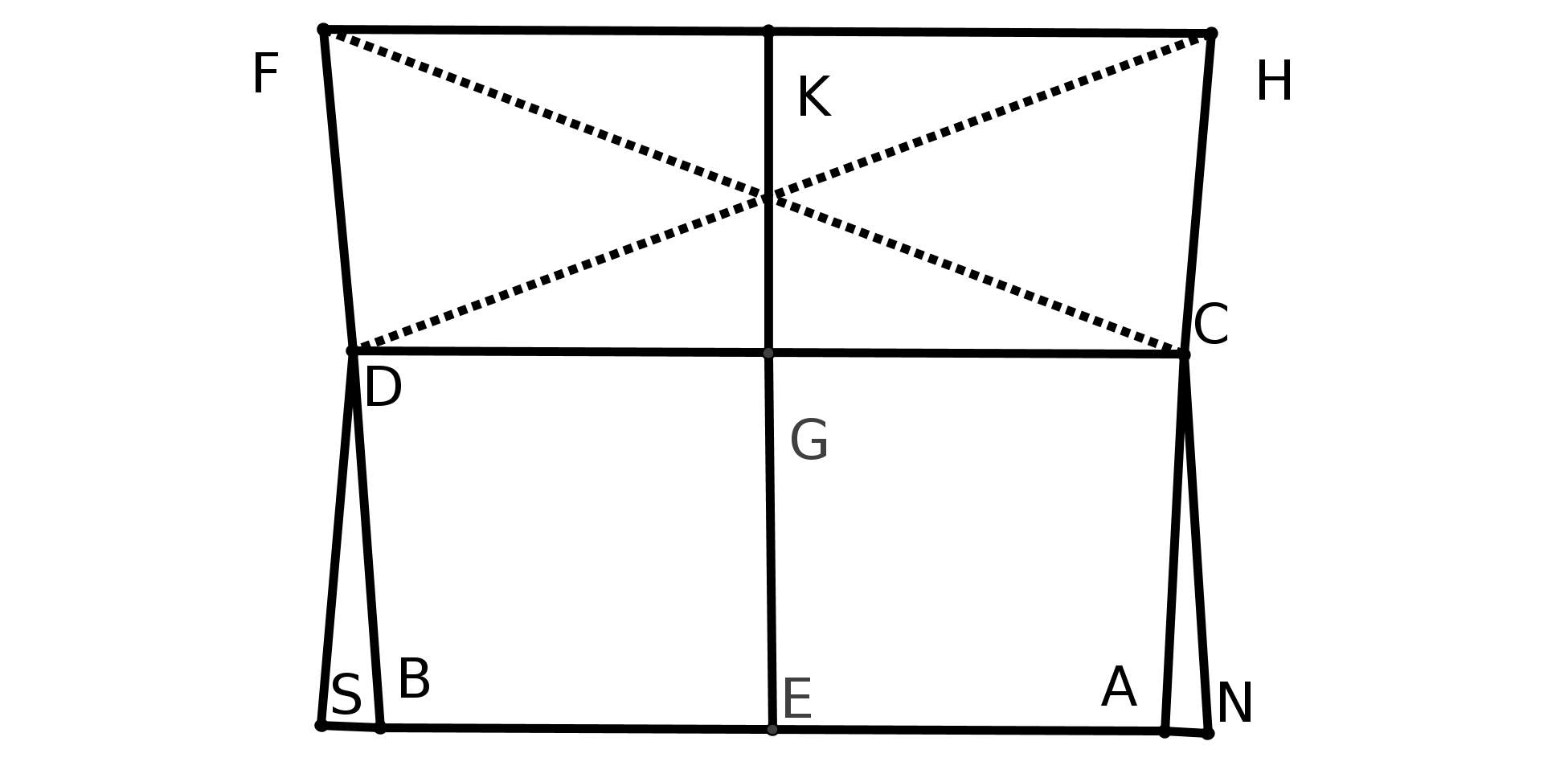
Par pliage F devient S et A devient N. Et naturellement FH=SN. Donc les perpendiculaires ŕ
AB, BD et AC s’écarteraient ce qui contredit le fait que deux perpendiculaires sont équidistantes,
conséquence de PK. Donc H1 est impossible.
Sous H2 on obtiendrait que les perpendiculaires se rapprocheraient, ce qui est aussi
impossible.
Sous H3 on n’obtient pas de contradiction.
Maintenant, une fois démontré cela il est facile de démontrer P5.
La démarche de Al Khayyam sera reprise par Saccheri Sept sičcles plus tard et il démontrera les premiers résultats de GNE sans le savoir !
Wallis remplace P5 par l’énoncé suivant qu’on appellera PW :
Quel que soit le triangle et quelle que soit la droite il est possible de construire sur la
droite un triangle semblable au triangle donné.
Cet énoncé ne fait que généraliser le postulat 3 d’Euclide qui demande de pouvoir tracer un cercle quel que soit le rayon, ce qui signifie que l’on peut tracer des cercles semblables.
Wallis pensait évident que son énoncé était indépendant de P5 et que l’on pouvait le rajouter ŕ la géométrie neutre sans avoir ŕ démontrer quelque chose.
Or PW est un cas particulier du théorčme 18 du livre VI d’Euclide. La démonstration
de ce théorčme utilise le fait que la somme des angles dans un triangle est égale ŕ
deux droits et... PW est une conséquence de P5 et il ne peut pas en ętre autrement. En
effet :
soit un triangle ABC et une droite DE. Construisons un triangle semblable ŕ ABC, de base DE.
Deux méthodes : soit on travaille sur les angles, soit on introduit les côtés proportionnels.
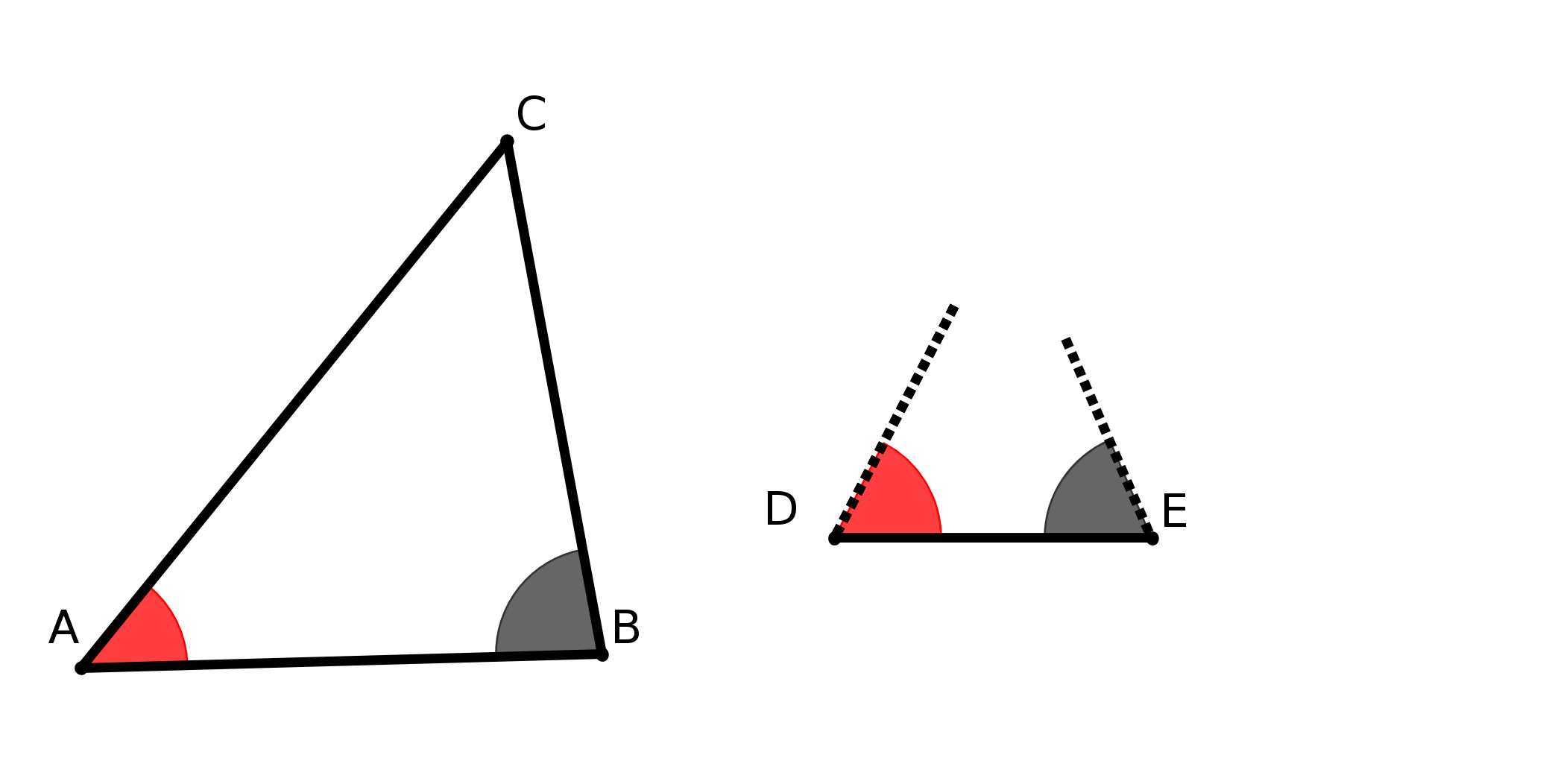
On sait construire les angles D et E égaux respectivement ŕ CAB et CBA (th23.1). On sait (th
17.1) que CAB et CBA sont plus petits que deux droits et les droites se coupent si on admet P5.
Donc, par les angles on utilise P5.
Soient de nouveau un triangle ABC et une droite DE et essayons de construire un triangle semblable ŕ ABC sans P5.
On construit l’angle D égal ŕ CAB (th 23.1) puis on trace DF=AC et DG=AB (Th2.1). On
obtient le triangle DFG égal ŕ ABC (Th4.1).
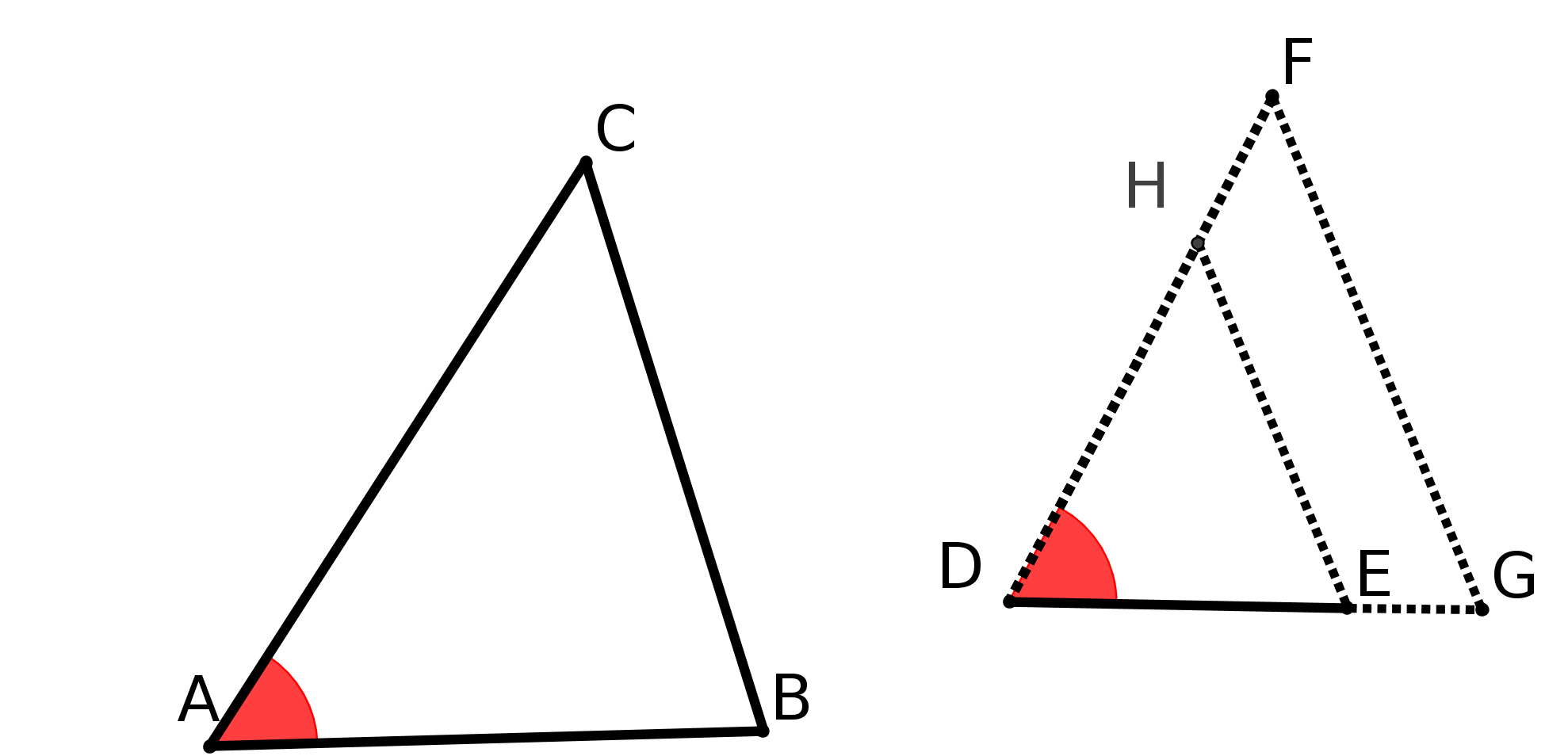
Puis on trace GF et "une" parallčle ŕ FG passant par E, EH, (on ne peut pas dire "la" parce
que l’unicité de la parallčle se déduit de P5. Voir la démonstration dans celle du théorčme 30
(début du chapitre) . Il faut démontrer ensuite que EH coupe proportionnellement DF et DG.
Malheureusement pour Wallis il s’agit de th 2.6 dont la démonstration utilise plusieurs théorčmes
conséquences de P5 !
Donc admettre PW sans chercher le lien qu’il pourrait avoir avec P5 est étonnant ! D’autant plus
que Wallis devait connaitre parfaitement les Eléments d’Euclide. Mais rappelons encore que nous
sommes dans le sičcle de Descartes et Newton et que, contrairement aux grecs on ne se pose pas le
problčme du fondement des mathématiques. PW semble tellement évident que l’on ne peut que
l’admettre.
Voyons maintenant comment on peut démontrer P5 ŕ partir de PW.
Soit un triangle MNP rectangle en P et soit une droite AB. On trace (PW) le triangle ABC
semblable ŕ MNP rectangle en A, de dimension double. Puis on trace le triangle BC’B’ égal au
triangle MPN. Puis on trace la perpendiculaire B’H ŕ AC.
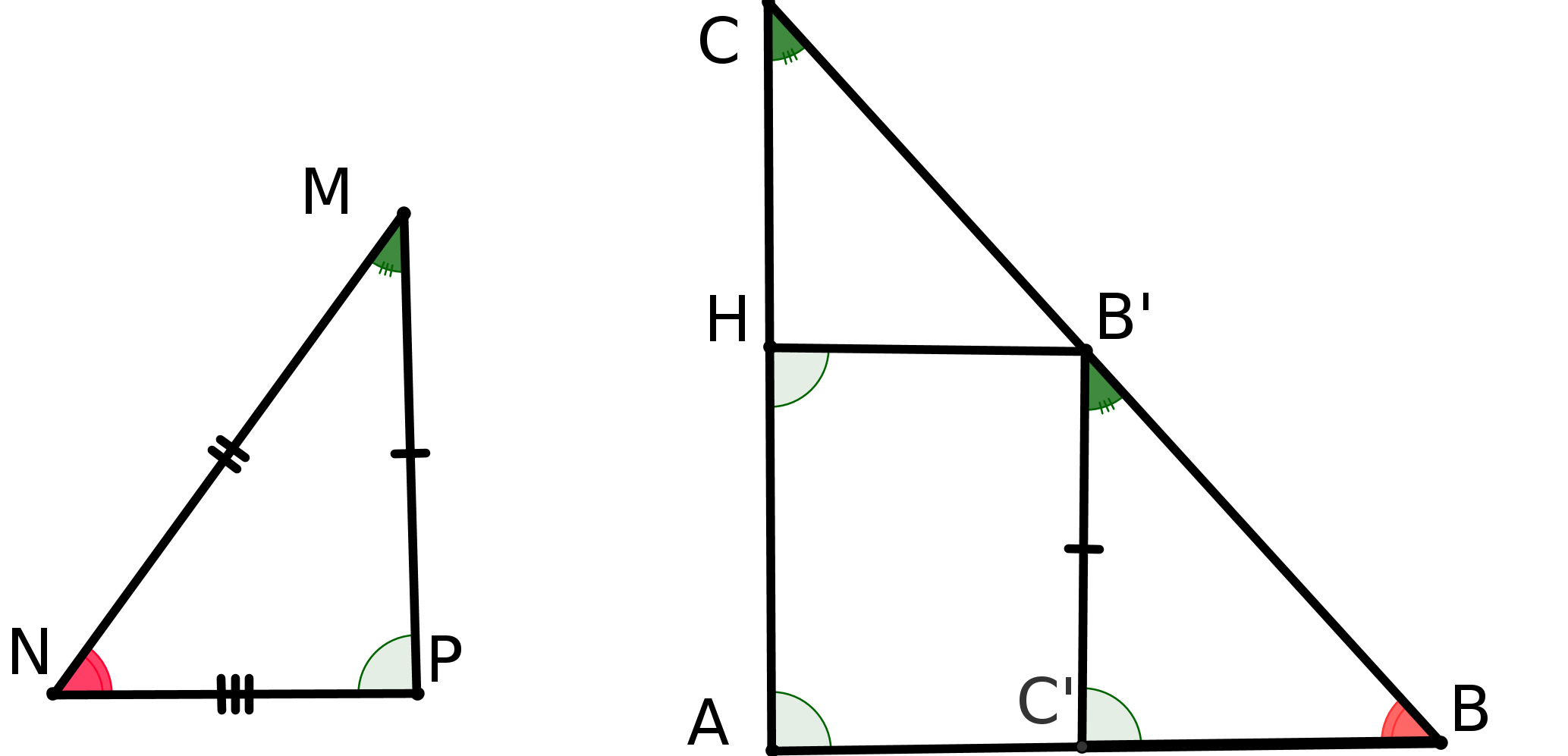
Cette construction s’est faite en utilisant uniquement PW et les théorčmes ne nécessitant pas P5.
1. Les triangles BB’C’ et B’HC sont égaux : (th 26.1) ils ont en effet deux angles égaux et un côté égal.(, et ).
2. Donc , .
3. Donc les triangles B’HC’ et HAC’ ayant trois côtés égaux sont égaux (th8.1) et donc
1
droit.
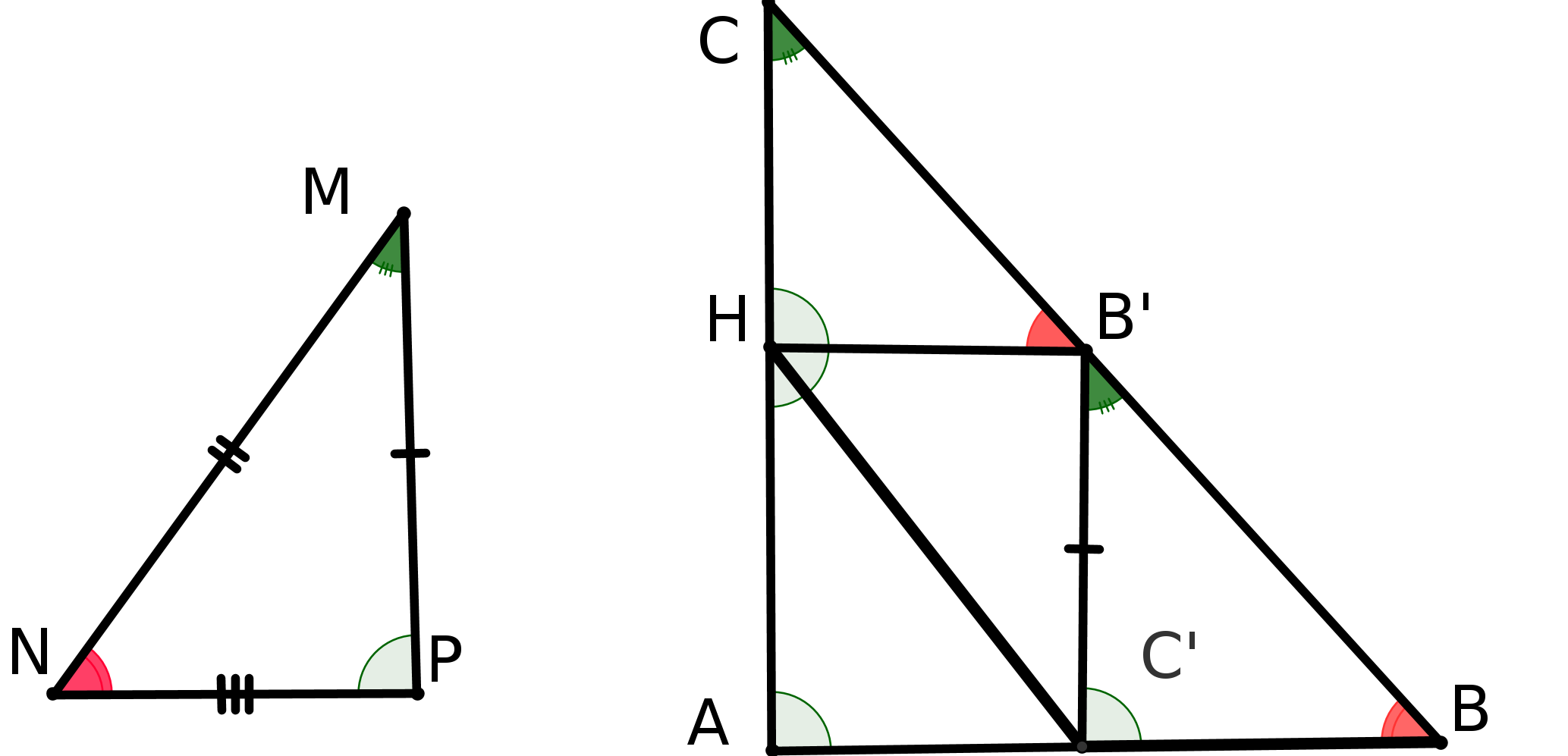
4. Comme =2 droits
d’oů =1 droit.
5. Donc la somme du triangle MNP est égale ŕ 2 droits.
Pour un triangle quelconque on se ramčne ŕ deux triangles rectangles, donc la somme de ses angles est aussi égale ŕ deux droits.
Théorčme 6.1 : Si deux droites sont parallčles toute droite qui coupe l’une coupe
l’autre.
Démonstration : Soient AB et CD deux droites parallčles, E un point de CD et EF1 une droite coupant CD.
Soient EG la perpendiculaire ŕ AB et F1H1 la perpendiculaire ŕ EG (th 12.1).
On prolonge EF1 en EF2 tel que et on trace la perpendiculaire F2H2.
La somme des angles étant égale ŕ 2 droits les triangles EF1H1 et EF2H2 ont
leurs angles égaux donc sont semblables et donc leurs côtés sont proportionnels. Ainsi
.
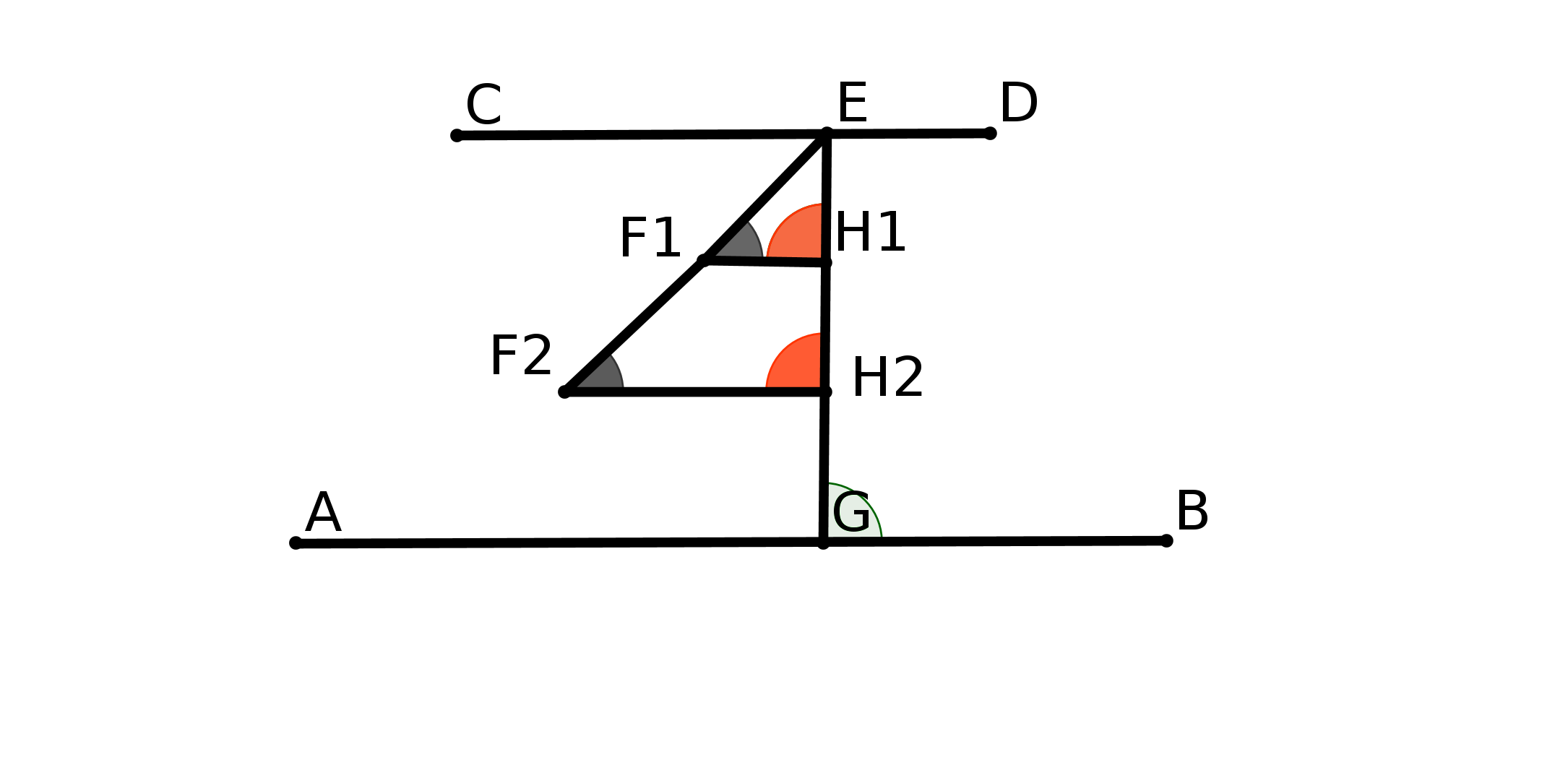
En itérant cette construction on obtient une suite de points Hi tels que, pour tout :.
Il existe
tel que .
EHn coupant AB et FnHn perpendiculairement, les droites AB et HnFN sont parallčles (th28.1).
Donc les points E et Fn sont de part et d’autre de AB donc EFn coupe AN. D’oů le
résultat.
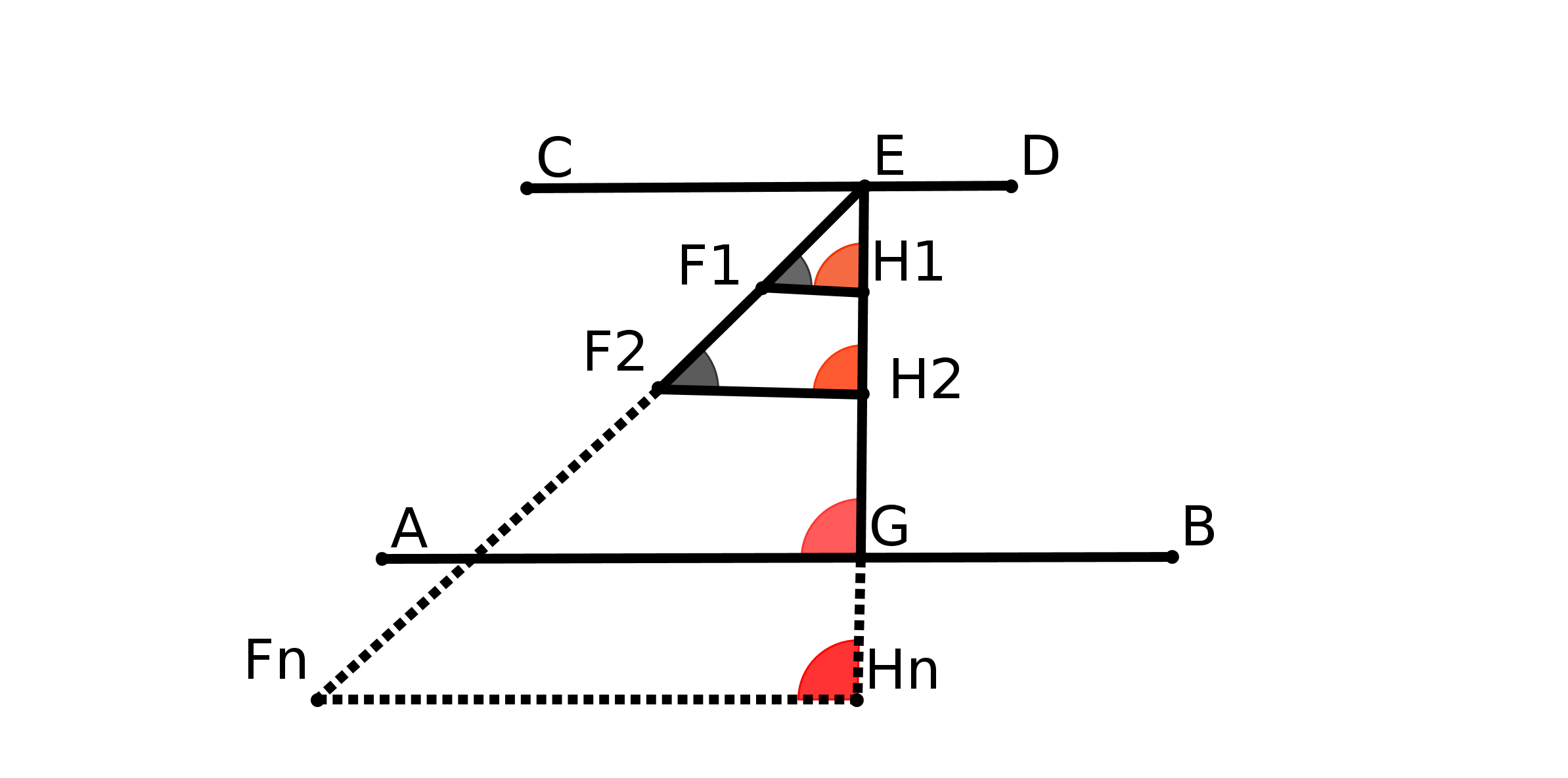
Soient deux droites AC et BD coupant la droite AB telles que les angles CAB et DBA sont
ensemble plus petits que deux droits.
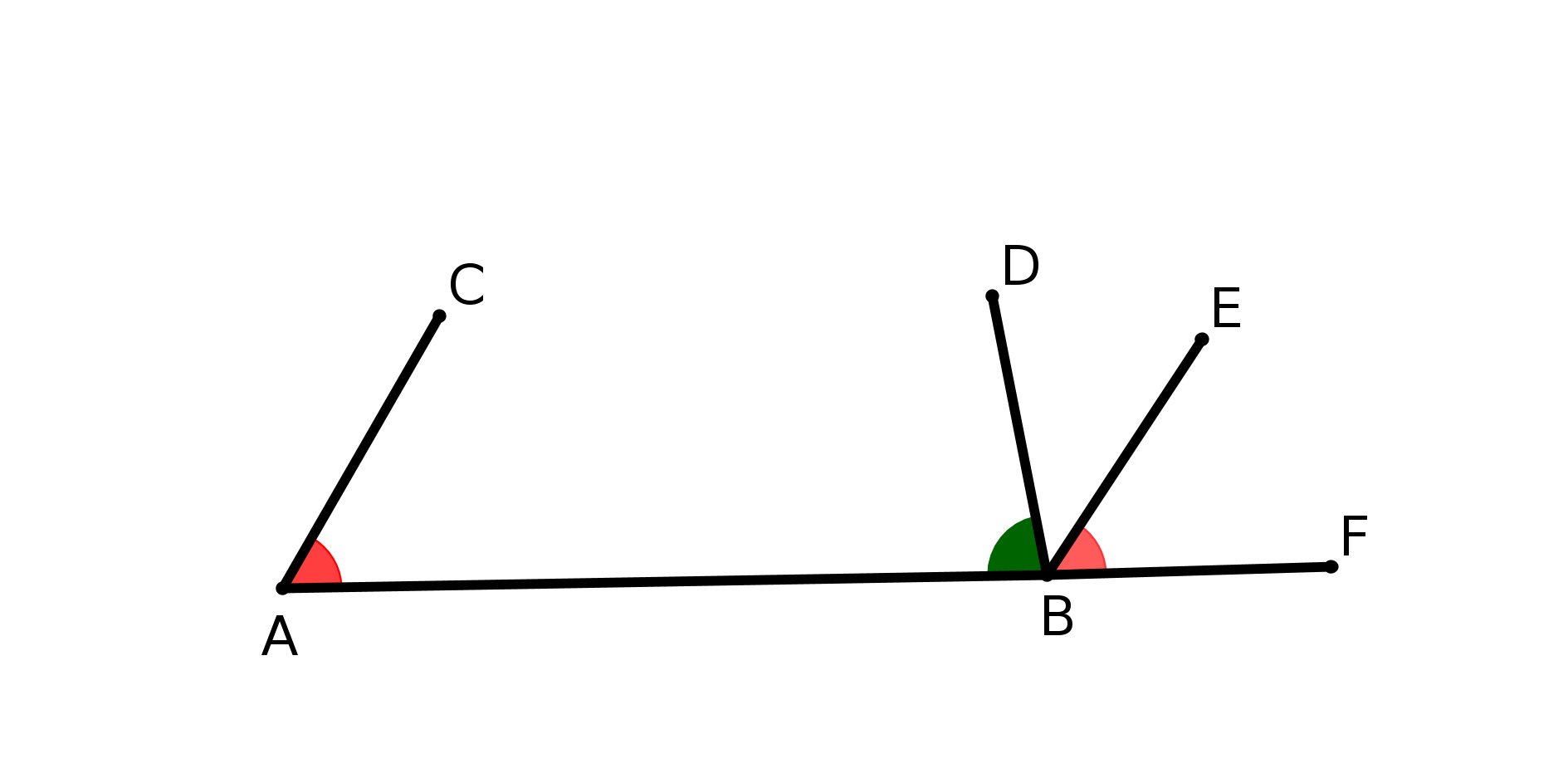
On prolonge AB en BF et on construit l’angle EBF égal ŕ CAB.
D’aprčs le th 28.1, EB et CA sont parallčles et les droites BD et BE ne sont pas confondues : en effet, si cela était le cas les angles CAB et DBA, ensemble, seraient égaux ŕ deux droits.
Donc BD coupe BE et donc coupe aussi AC. Ce qu’il fallait démontrer.
Saccheri prend donc un quadrilatčre ABDC, celui de Al Khayam, dans lequel les angles A et B sont droits et les côtés AC et BD sont égaux. Ce quadrilatčre est appelé quadrilatčre de Saccheri. On le notera S-q
Naturellement, pour nous, il est évident que les angles C et D sont droits. Mais pour affirmer cela il faut utiliser le fait que deux droites parallčles sont équidistantes. Or ce résultat découle de P5 et c’est justement P5 que Saccheri veut démontrer ! Ainsi , si l’on sait que les droites AC et BD sont parallčles (th27) on ne sait rien de plus.
Dans ce chapitre on garde, du livre 1, toutes les définitions, les postulats, excepté P5, et tous les axiomes, et enfin les vingt huit premiers théorčmes, ceux qui ne dépendent pas de P5.
Nous allons essayer, ŕ partir de lŕ, de démontrer des résultats de Saccheri.
Proposition 7.1 : dans un S-q, ABDC, les diagonales sont égales, les angles C et D
sont égaux et si on appelle O le point d’interchapter des diagonales, les triangles OCD
et OAB sont isocčles.
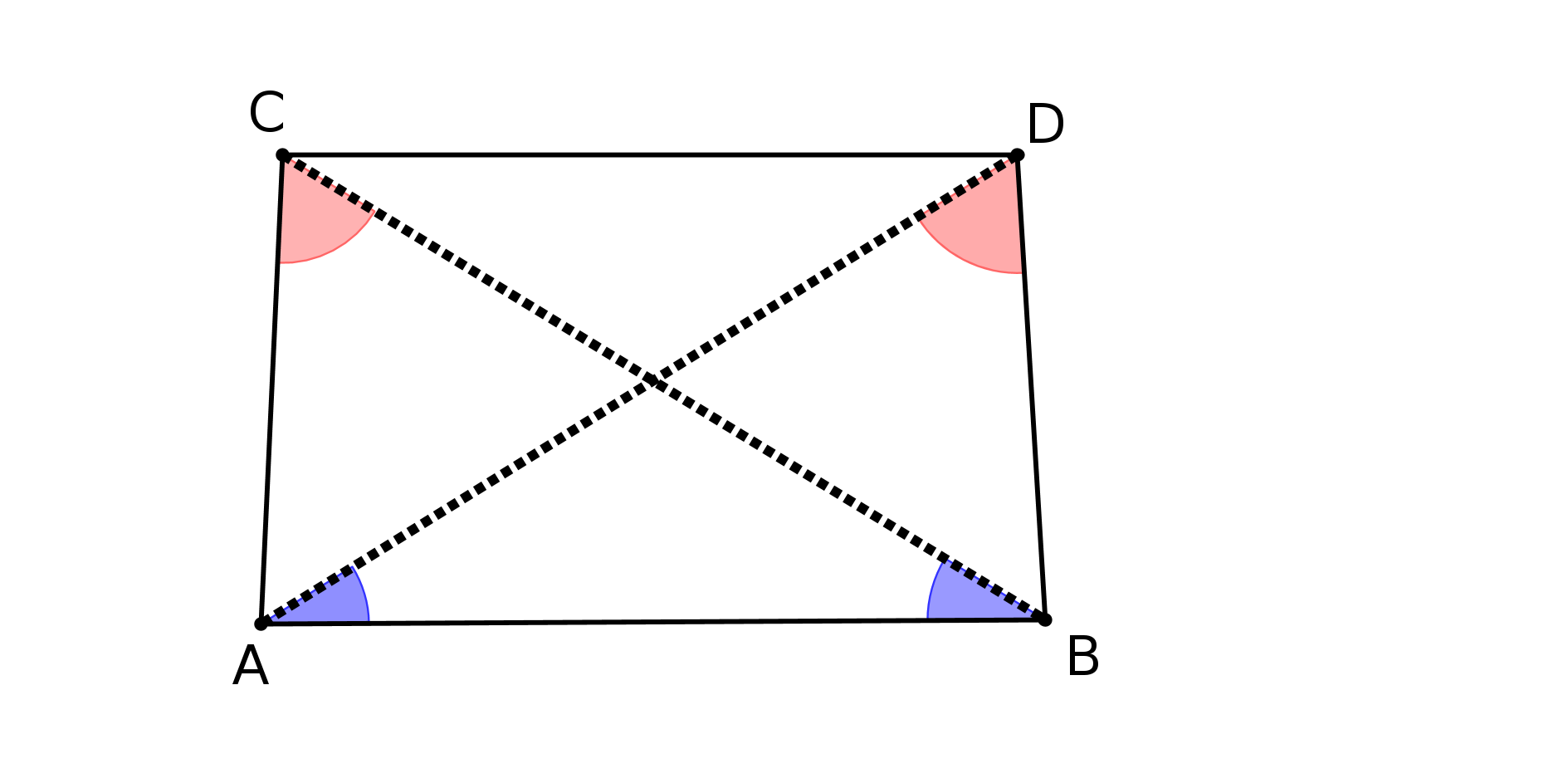
Remarque : Quel que soit le prolongement de AC ou BD, cette figure existe d’aprčs Th 28.1 : deux doites perpendiculaires sont parallčles
Les triangles CAB et DBA sont égaux (th4.1) :
En effet : , , (th4.1).
Donc, en particulier,
et les égalités d’angles marqués sur la figure.
Puis on démontre l’égalité des triangles DCA et CDB : en effet :
, , . D’oů, en particulier : et les autres angles marqués sur la figure qui suit.
En conclusion : on sait que les angles C et D du quadrilatčre sont égaux mais on ne connaît pas leur valeur.
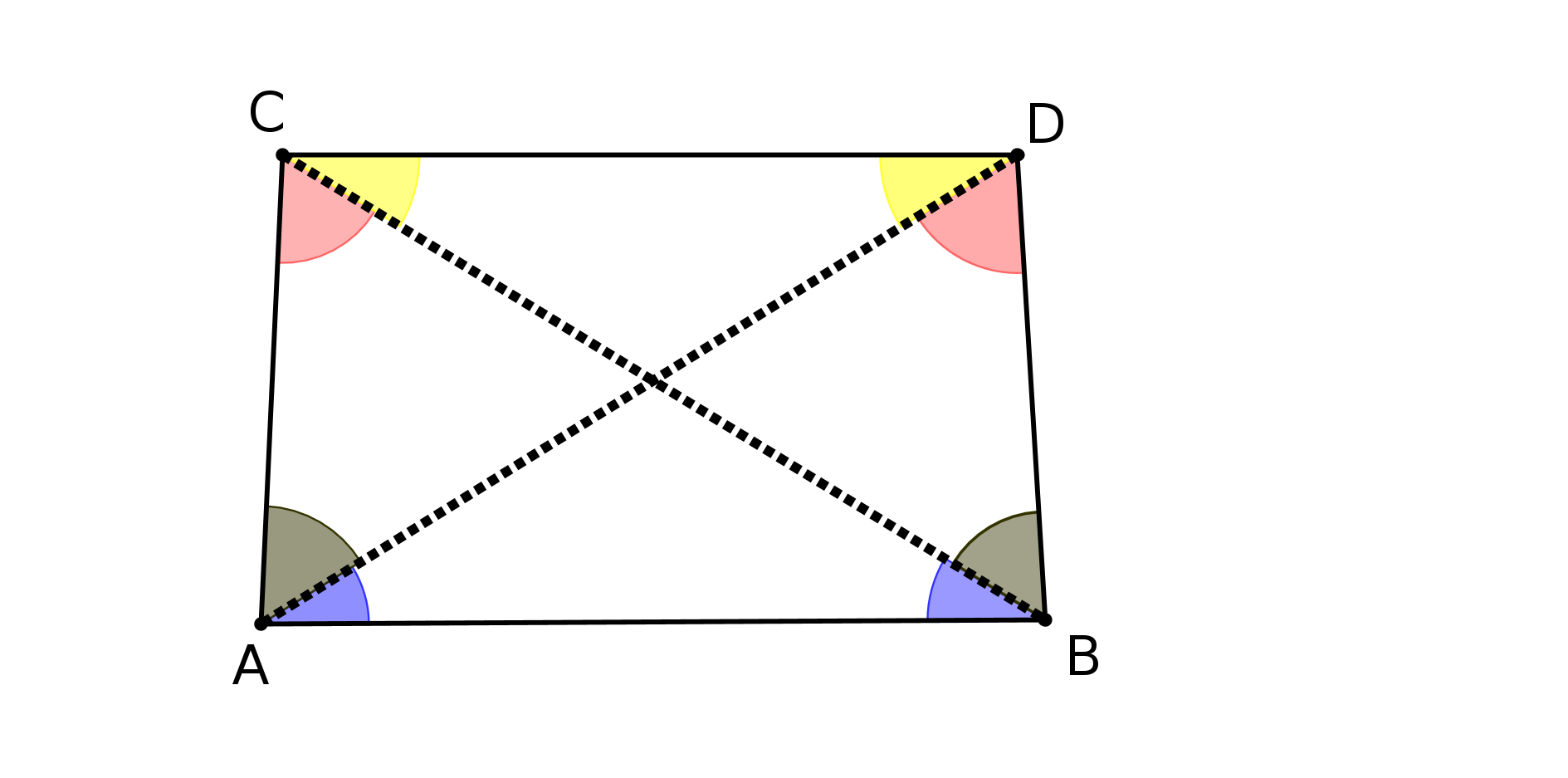
Proposition 7.2 : soit un S-q, ABDC, et soient deux points E et F respectivement sur
AC et BD, prolongées ou non, tels que AE=BF. Alors les diagonales de CEFD sont
égales, et si on appelle O le point d’interchapter des diagonales, les triangles OEF et
OCD sont isocčles.
La démonstration est la męme que pour la proposition 1.
Le quadrilatčre ABFE est un S-q donc les angles E et F sont égaux.
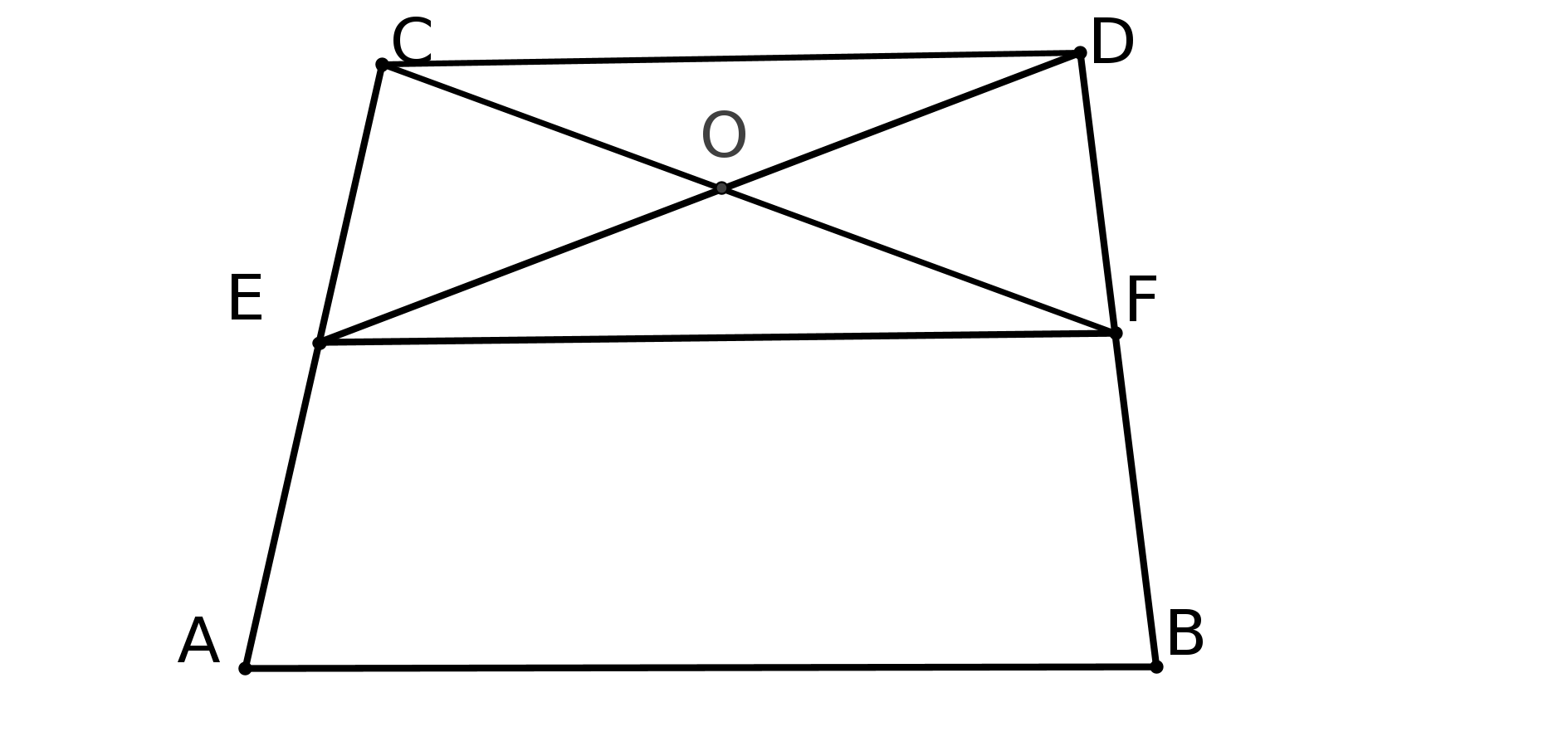
En effet les triangles CEF et DFE sont égaux puisque :
1. .
2. et .
les triangles CED et CDF sont égaux puisque :
1. .
2. et .
Donc, en particulier les diagonales CF et ED sont égales et les triangles OCD et OEF sont
isocčles.
Proposition 7.3 : soit S-q, ABDC, et soient I et J les milieux respectifs de AB et CD .
Alors IJ est perpendiculaire ŕ AB et CD et passe par le point d’interchapter des
diagonales. En particulier AB et CD sont parallčles.
De plus si E et F sont définis comme dans la proposition 2, IJ passe par le point
d’interchapter des diagonales du quadrilatčre EFDC.
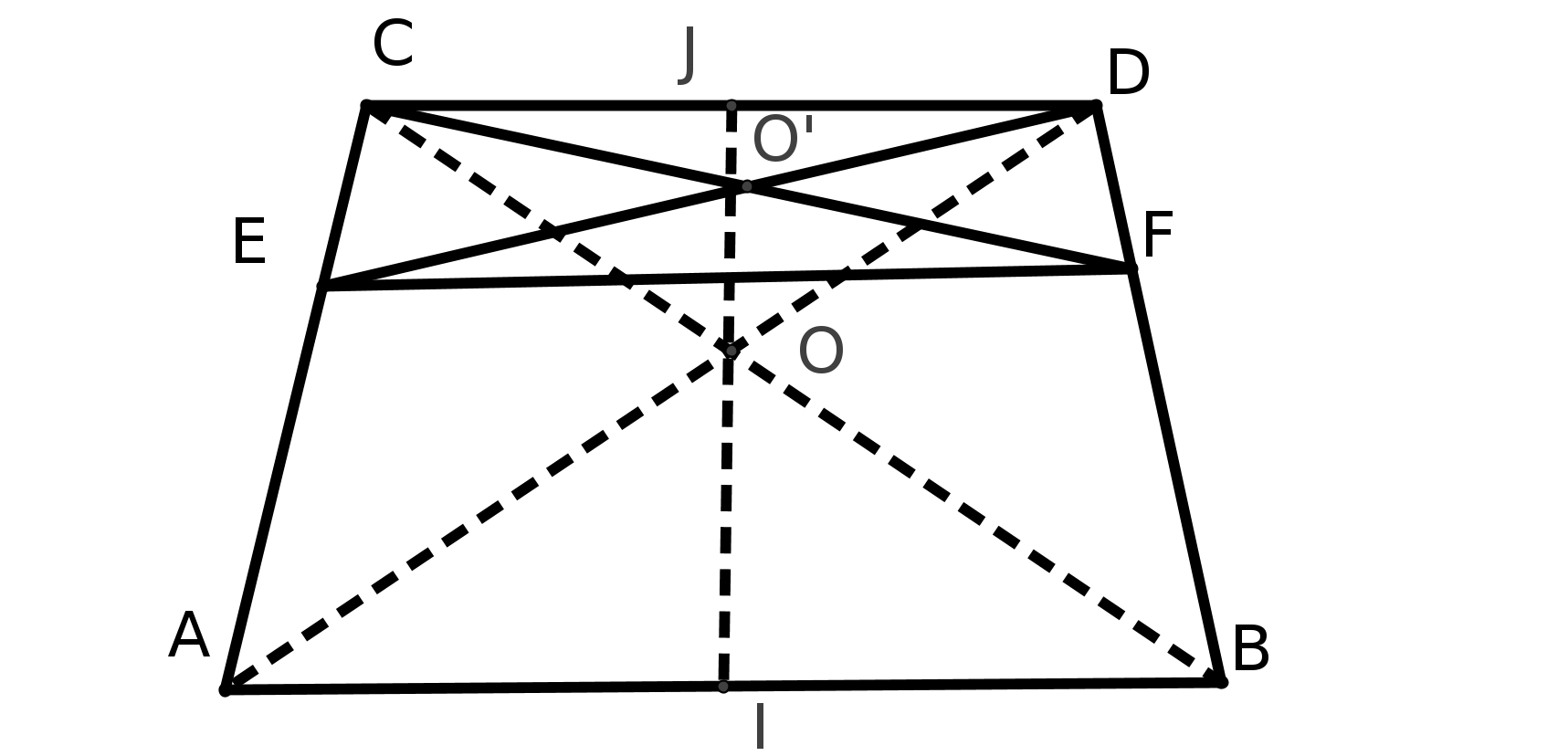
Rapidement : le triangle OAB est isocčle et donc la droite OI est perpendiculaire ŕ AB (On ne fait qu’appliquer des théorčmes de 1 ŕ 28 du livre 1).
La droite OI coupe l’angle AOB en deux angles égaux. De męme la droite OJ coupe l’angle COB en deux angles égaux.
Les angles COA et DOB sont égaux donc les angles COJ et DOJ sont égaux aux angles AOI et
BOI. Donc les angles JOC, COA et AOI, pris ensemble, sont égaux aux angles JOD, DOB et BOI,
pris ensemble. Donc I, O et J sont alignés.
IJ, étant la médiatrice des segments AB et CD, O’ est sur IJ.
IJ étant une perpendiculaire commune ŕ AB et CD, les droites AB et CD sont parallčles (th
27.1).
A partir de son quadrilatčre Saccheri émet les trois hypothčses suivantes :
H1 : C et D sont droits.
H2 : C et D sont obtus.
H3 : C et D sont aigus.
Puis il espčre, sous H1, démontrer P5 et arriver, sous les hypothčses H2 ou H3, ŕ une contradiction. Donc, seule la géométrie euclidienne serait valide et P5 serait démontré !
Lemme 1 : Soit AB une droite et E n’appartenant pas ŕ cette droite. On appelle F le point de
AB tel que EF est perpendiculaire ŕ AB. Soit M un point quelconque de FA. Alors l’angle EMA est
obtus et l’angle EMB aigu.
Démonstration :
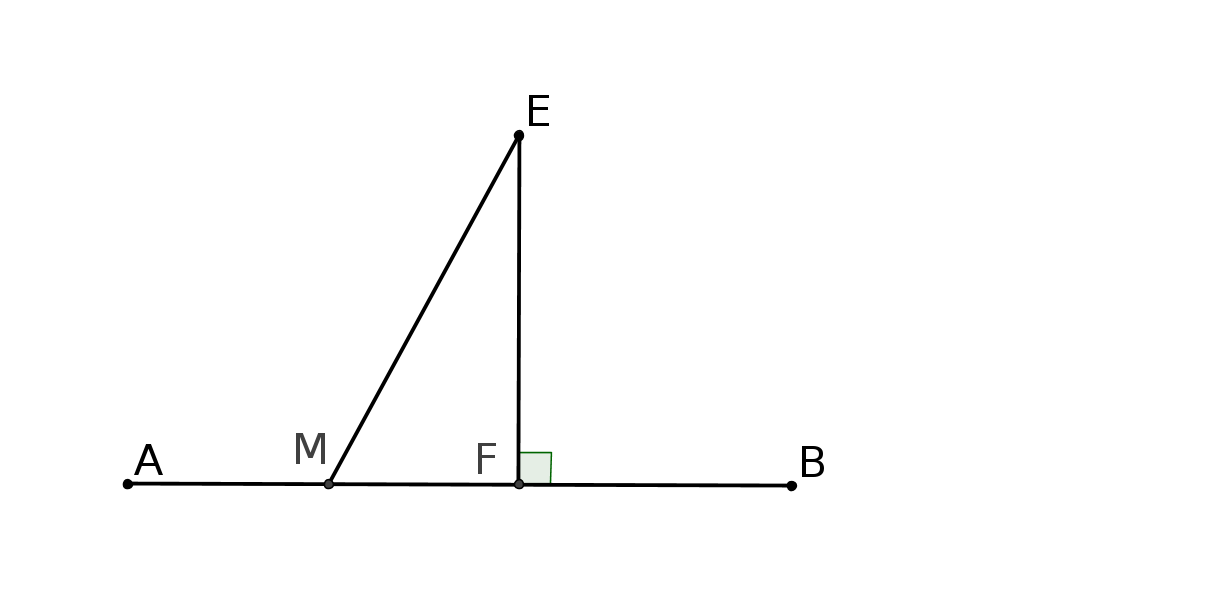
Rappelons le th16.1 :le côté d’un triangle étant prolongé, l’angle extérieur est plus grand
que chacun des angles opposés et intérieurs.
EF existe d’aprčs Th12.1 et le résultat est une application de Th.16.1.
Lemme 2 : si dans un S-q, ABDC, tel que AC=BD, il ya quatre angles droits alors
AB=CD.
Démonstration : D’aprčs P.7.1, les diagonales AD et BC sont égales. Les triangles
ACD et ACB sont égaux (un angle et deux côtés égaux) donc on en déduit que
AB=CD.
lemme 3 : soit un rectangle ABDC et soit E un point de AC. Soit F le point de BD tel que EF
est perpendiculaire ŕ BD. Alors l’angle FEA est droit.
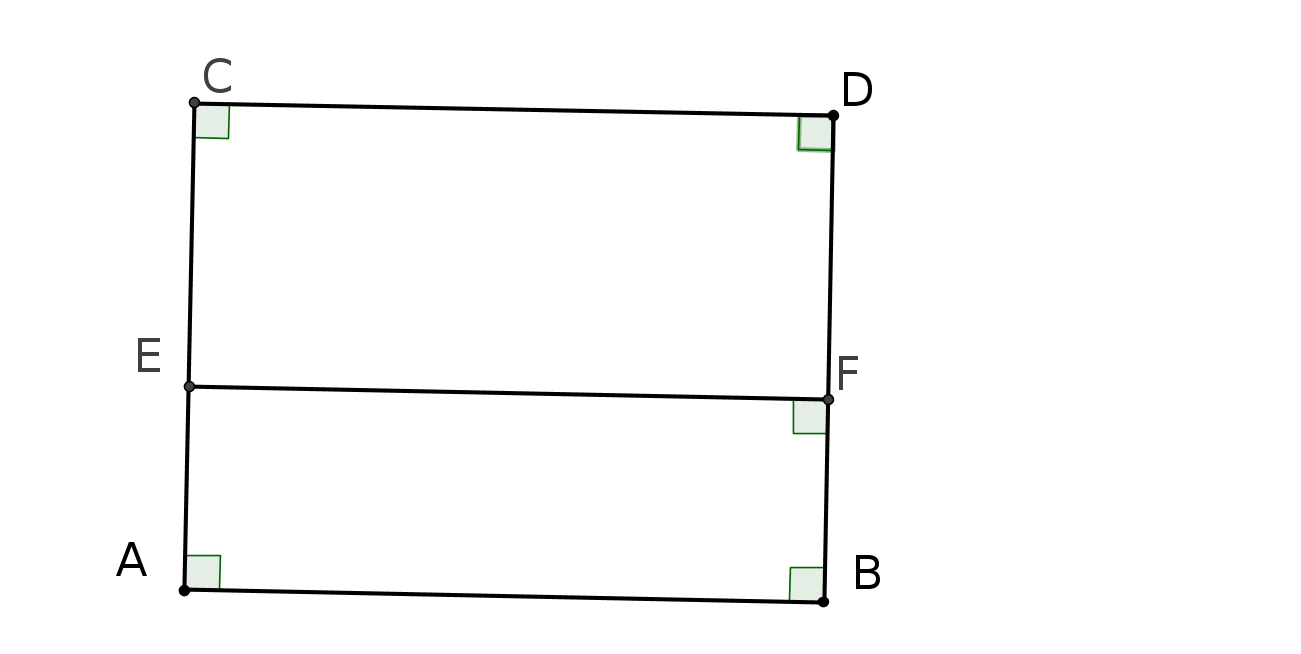
Démonstration :
Supposons l’angle AEF aigu.
On place sur BA (prolongée ou non) ŕ partir de B le point E’ tel que BE’=EF. Alors BFEE’ est
un quadrilatčre de Saccheri. Donc les angles FEE’ et BE’E sont égaux. Supposons que E’ soit sur
AB (n’oublions pas que les droites sont finies).
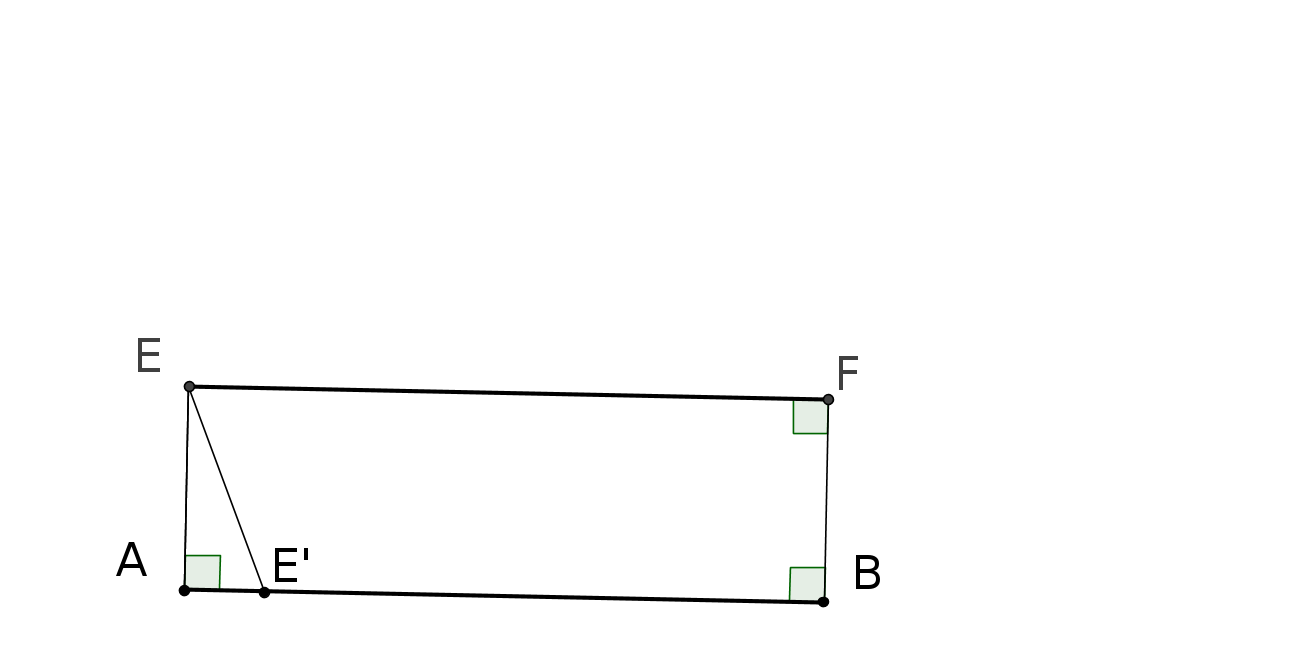
On a supposé l’angle FEA aigu donc l’angle FEE’ est aigu. Mais d’aprčs le lemme
1 BE’E est obtus. Or ces deux angles sont égaux donc E’ n’est pas sur AB donc
.
Raisonnons maintenant sur le quadrilatčre EFDC. On place E" sur DC prolongé, ŕ
partir de D, tel que DE"=EF. Comme on a supposé l’angle FEA aigu, l’angle FEC est
obtus.
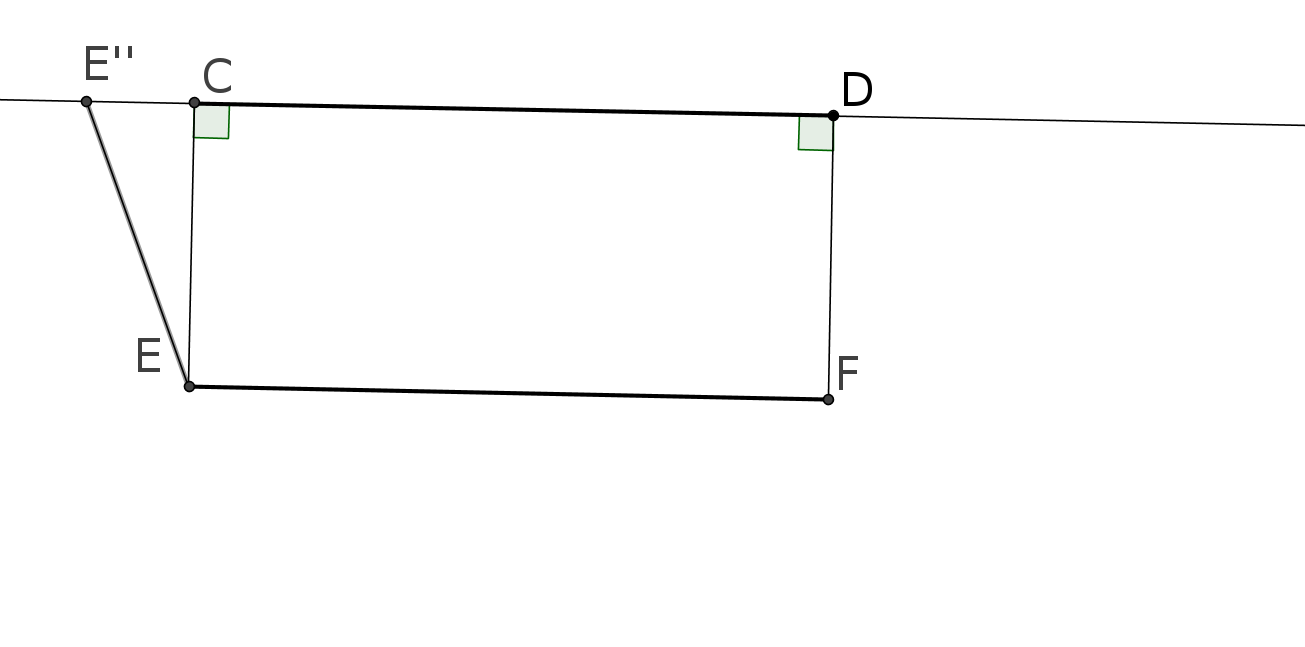
Donc, puisque EFDE" est un S-q, les angles FEE" et DE"E sont égaux. Comme l’angle FEE" est
plus grand que FEC, il est obtus. D’aprčs le lemme 1, c’est impossible donc E" est sur DC, donc
donc
.
Donc .
Donc .
Or ABDC est un rectangle donc AB=CD. Donc l’angle FEA ne peut ętre aigu. De męme il ne peut
ętre obtus. Donc il est droit.
Lemme 4 : soit un rectangle ABDC et soit E un point sur AC prolongée du côté de
C. Soit F le point de BD tel que EF est perpendiculaire ŕ BD. Alors l’angle FEA est
droit.
Démonstration :
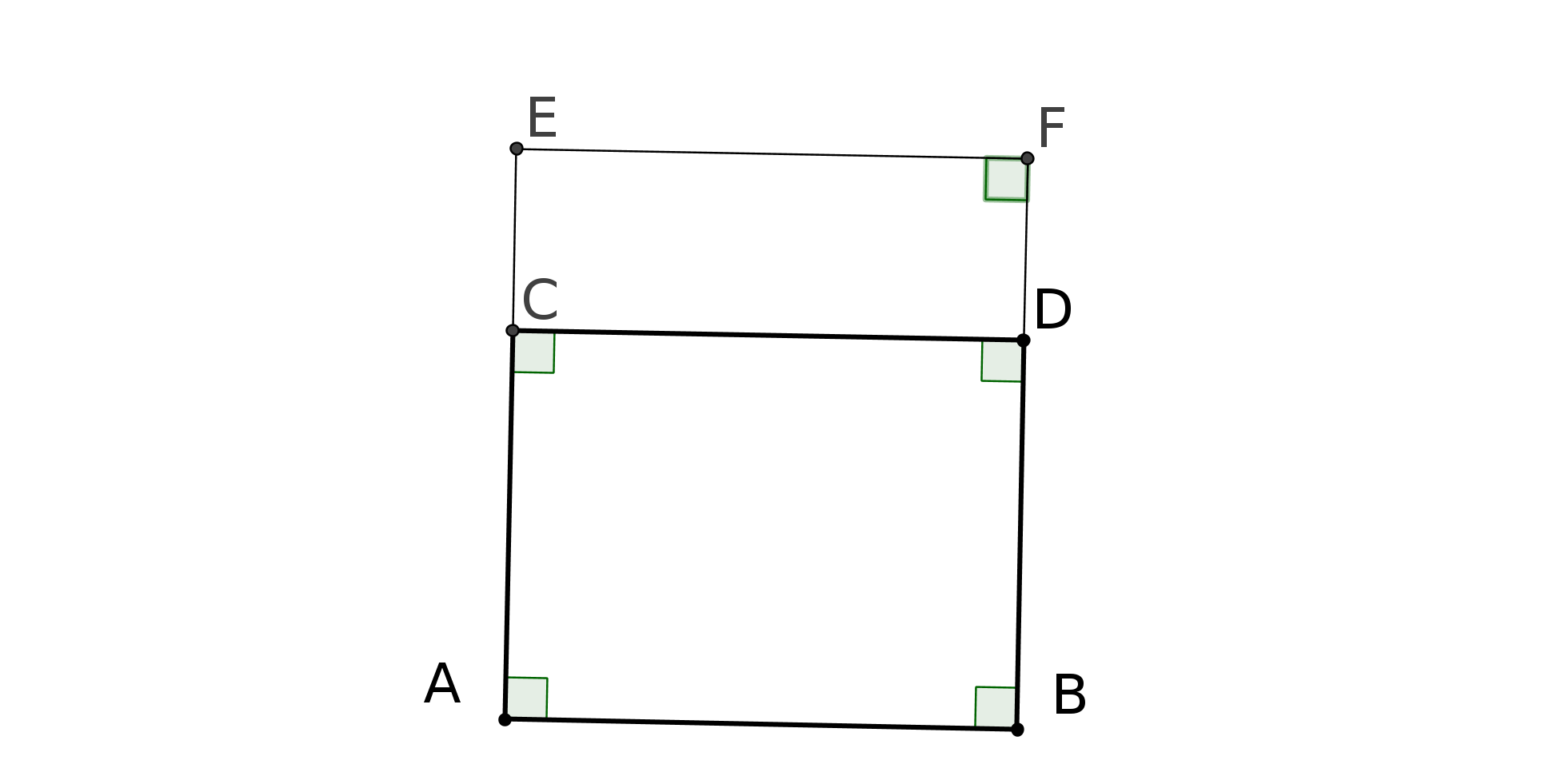
On va se ramener au lemme 3.
D’aprčs P2 on peut prolonger continűment une droite. Donc Prolongeons AC du double ainsi
que BD. On obtient la figure suivante :
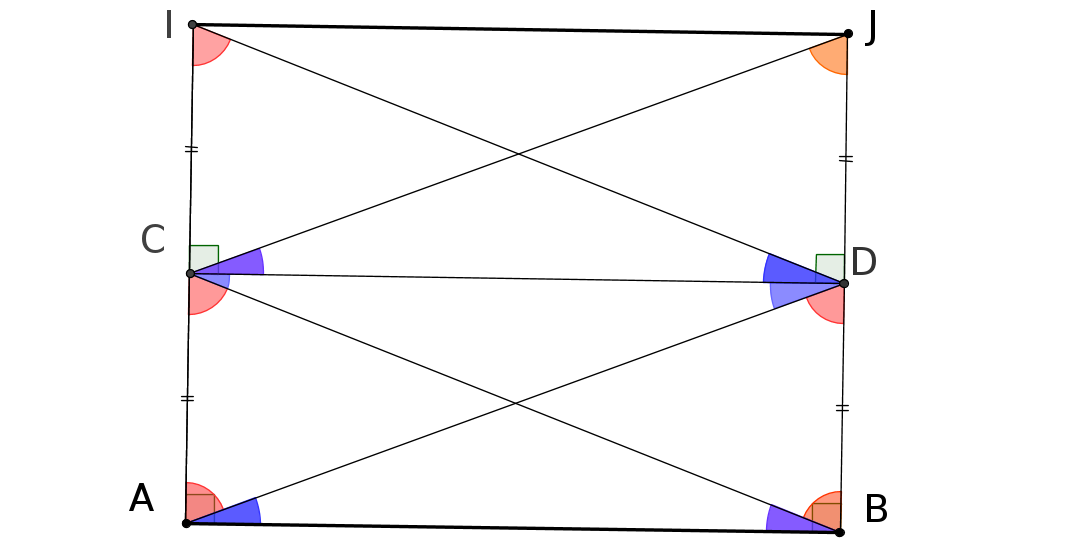
On démontre facilement l’égalité des triangles ABC, ABD, CAD, CBD, CJD, IDC d’oů on en
déduit l’égalité des angles indiqués sur la figure.
L’angle ICD est droit donc ICJ et CID sont égaux donc les triangles ICJ et ICD sont égaux
donc les angles IJC et IDC aussi. Comme les angles IDC DIC pris ensemble sont égaux ŕ un
droit, l’angle IJD est droit donc AIJ aussi, puisque ABJI est un S-q, donc ABJI est un
rectangle.
En recommençant cette opération autant de fois qu’il le faut, on peut supposer que le point E,
męme s’il est le prolongement de AC, appartient au côté d’un rectangle. Ainsi l’angle FEA est
droit.
Proposition 7.4 : S’il existe un S-q qui est un rectangle tous les S-q le sont aussi.
Démonstration soit ABDC un rectangle et E’F’T’G’ un S-q.

1. ABDC pouvant ętre agrandi autant de fois qu’on le veut, on peut supposer que
et
. Ainsi
construisons le S-q AFHG tel que AF=E’F’, AG=E’G’. On obtient la figure suivante :
Soit H’ le point de CD tel que FH’ est perpendiculaire ŕ CD. Mais d’aprčs le lemme 3 cela
implique que l’angle AFH’ est droit donc F, H et H’ sont alignés. Donc AFH’C est un
rectangle.
2. Soit G’ le point de FH’ tel que GG’ est perpendiculaire ŕ FH’. Alors, d’aprčs le lemme 3, l’angle AGG’ est droit.
Si on suppose que l’angle AGH est aigu, alors G’ est sur HH’ et donc l’angle GHF est obtus : c’est
impossible puisque les deux angles AGH et GHF sont égaux. Si on suppose que l’angle AGH
est obtus, alors l’angle GHF est aigu : c’est impossible. Donc AFHG est un rectangle.
Remarque : on pourrait se demander si avec la construction ci-dessus les S-q, AFHG et E’F’T’G’,
sont égaux. Pour s’en persuader il suffit de considérer les égalités des triangles des deux figures.
Donc les deux S-q auront les męmes angles au sommet.
Corollaire 7.4 : Si un quadrilatčre a trois angles droits le quatričme angle est aussi
droit.
Démonstration :

Soit D’ tel que AD’=BD. Alors ABDD’ est un S-q donc l’angle BDD’ est droit donc C=D’. D’oů
le résultat.
Proposition 7.5 : la somme des angles d’un triangle est égale ŕ deux droits.
1. Soit ABC un triangle rectangle et A. On trace la perpendiculaire ŕ AB en B, BD, telle que
BD=AC. Donc ABDC est un S-q donc un rectangle dont la somme des angles est égale ŕ 4
droits.
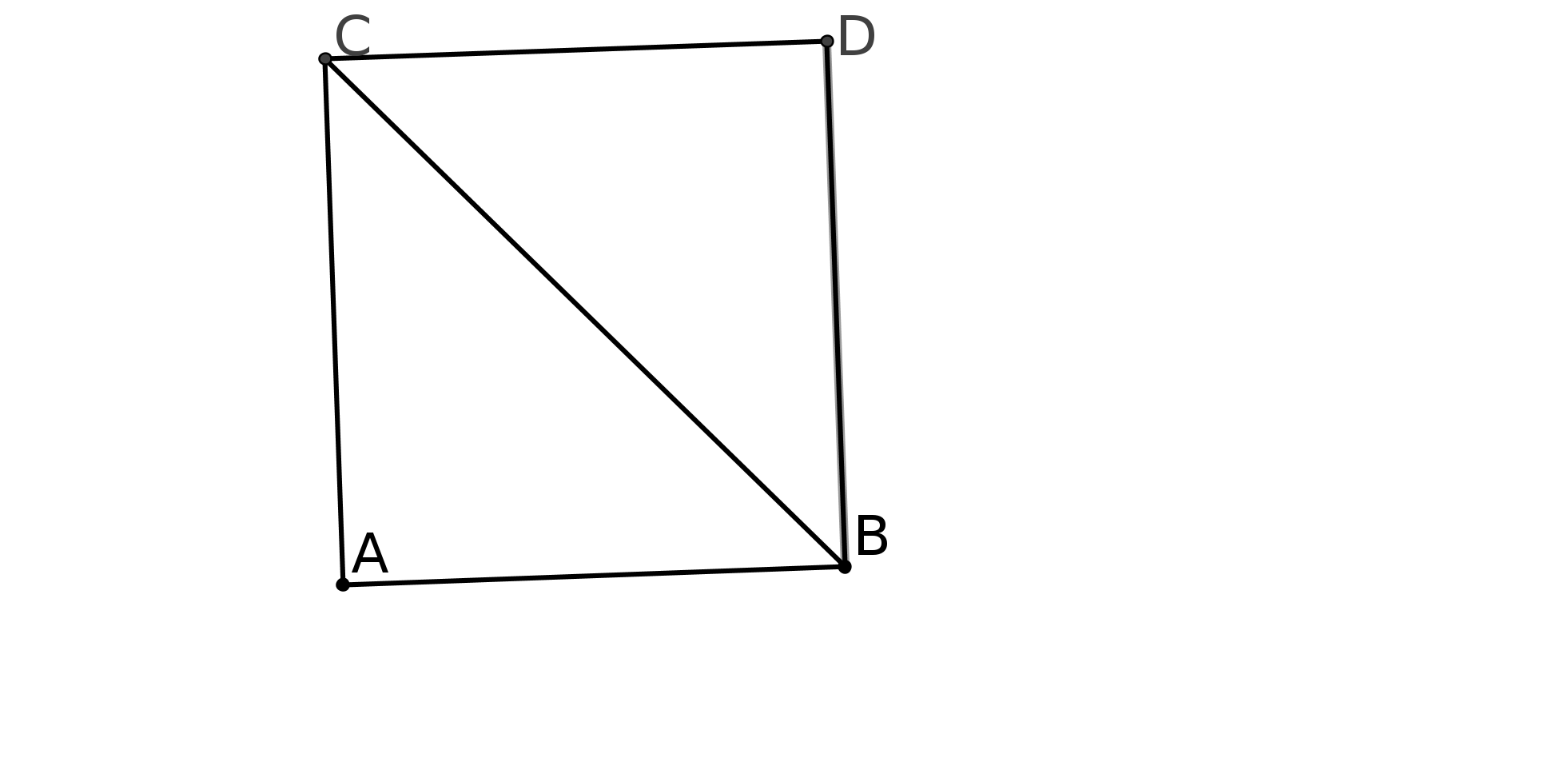
Les triangles ABC et BCD sont égaux donc la somme des angles de ABC est égale ŕ deux
droits.
2. Prenons d’abord un triangle ABC de hauteur CE, E étant sur AB ou sur son prolongement.
a. Si E est sur AB :
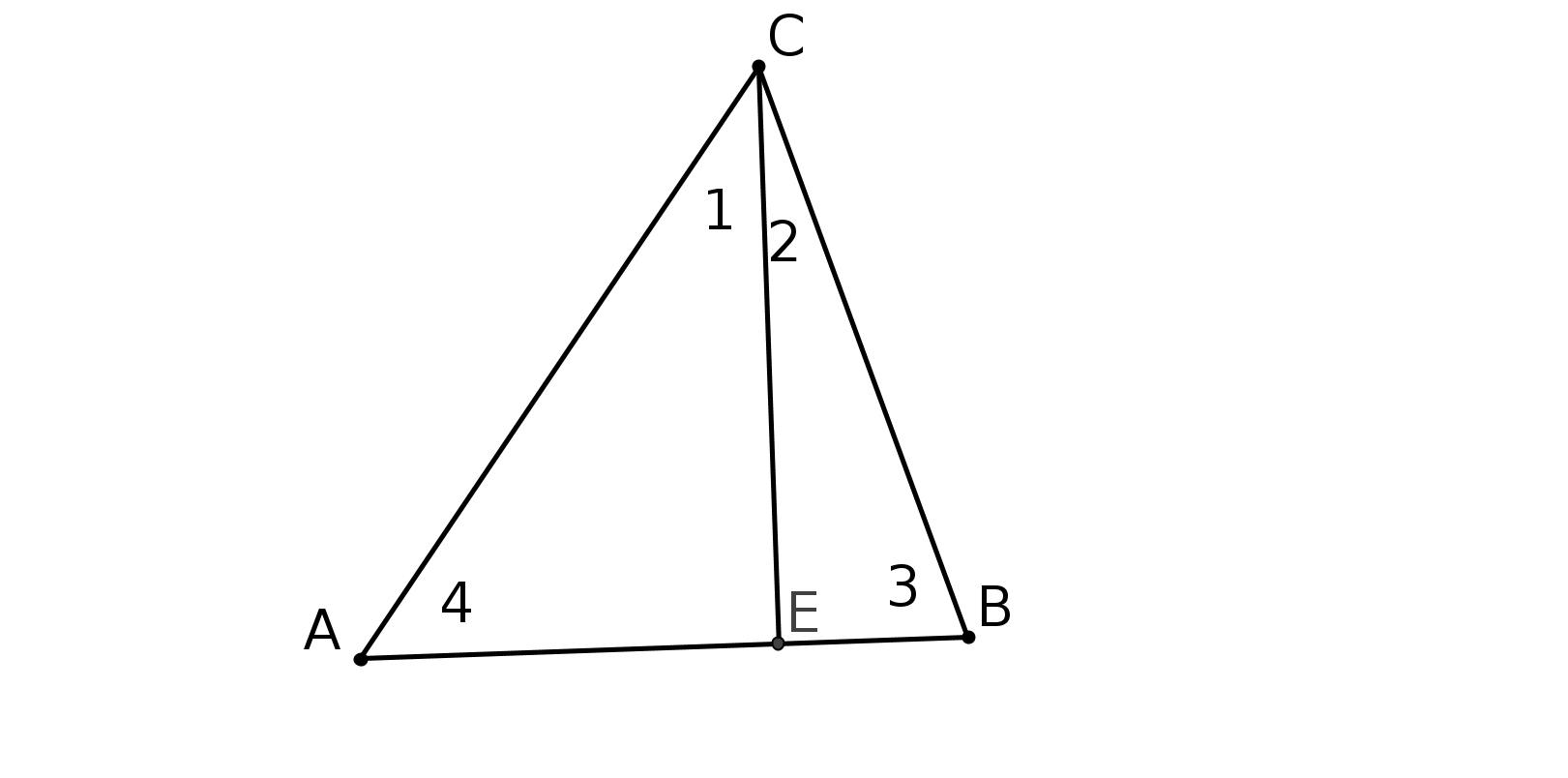
La somme, S, des angles de ABC est :
S=1+2+3+4=(1+4+1droit)+(2+3+1droit)-2droits= 2 droits si on applique 1.
b. Si E est sur le prolongement de AB :
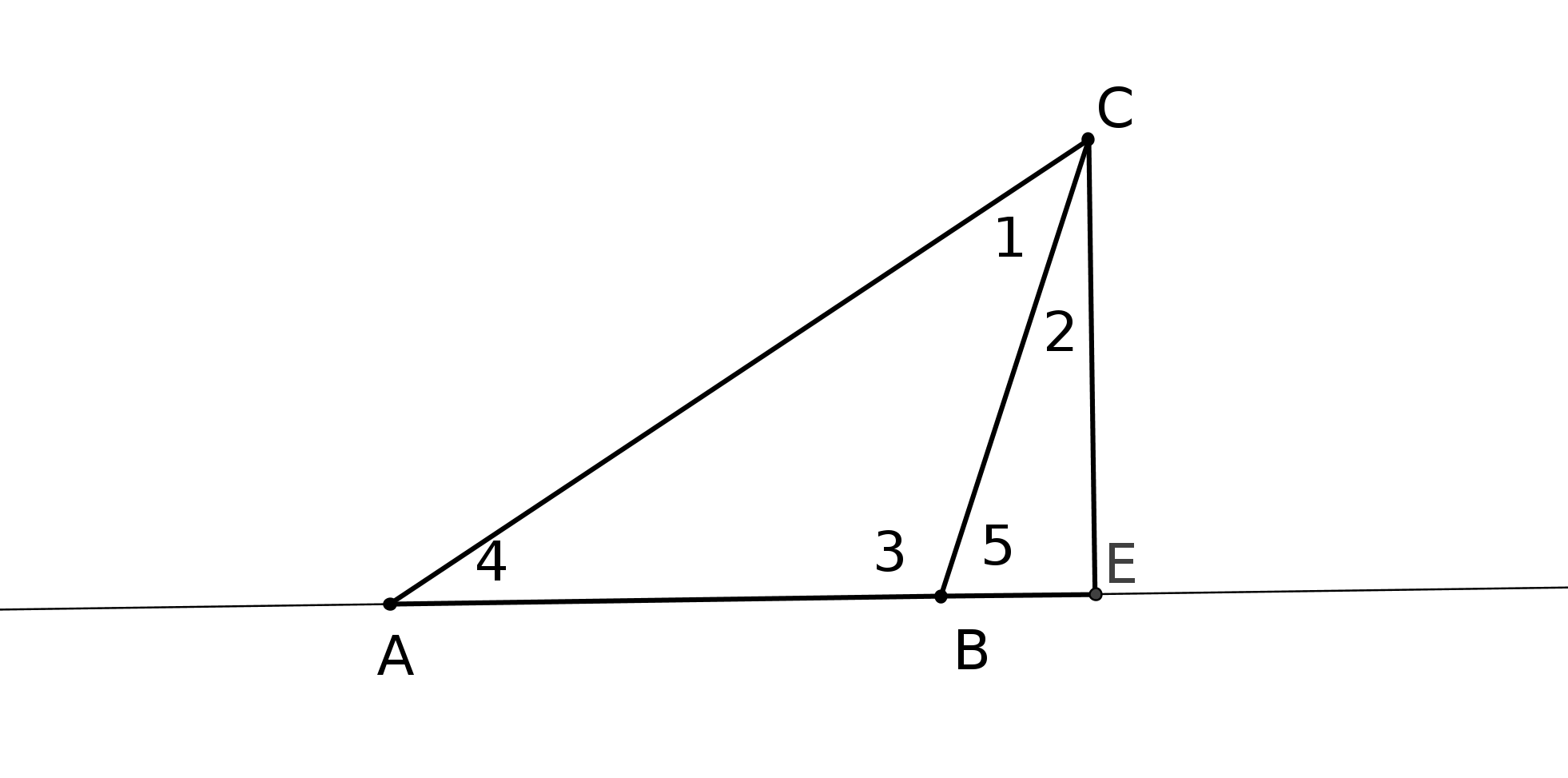
les triangles ACE et BCE sont rectangles donc on a :
1+2+4=2+5 donc 1+3+4+2=2+3+5 donc 1+3+4= 2 droits d’oů le résultat.
Proposition 7.6 : P5 est vrai.
Saccheri montre d’abord le résultat suivant.
lemme : soient trois droites AC, AB, BD telles que BD est perpendiculaire et l’angle
CAB est aigu. Alors AC et BD se coupent.
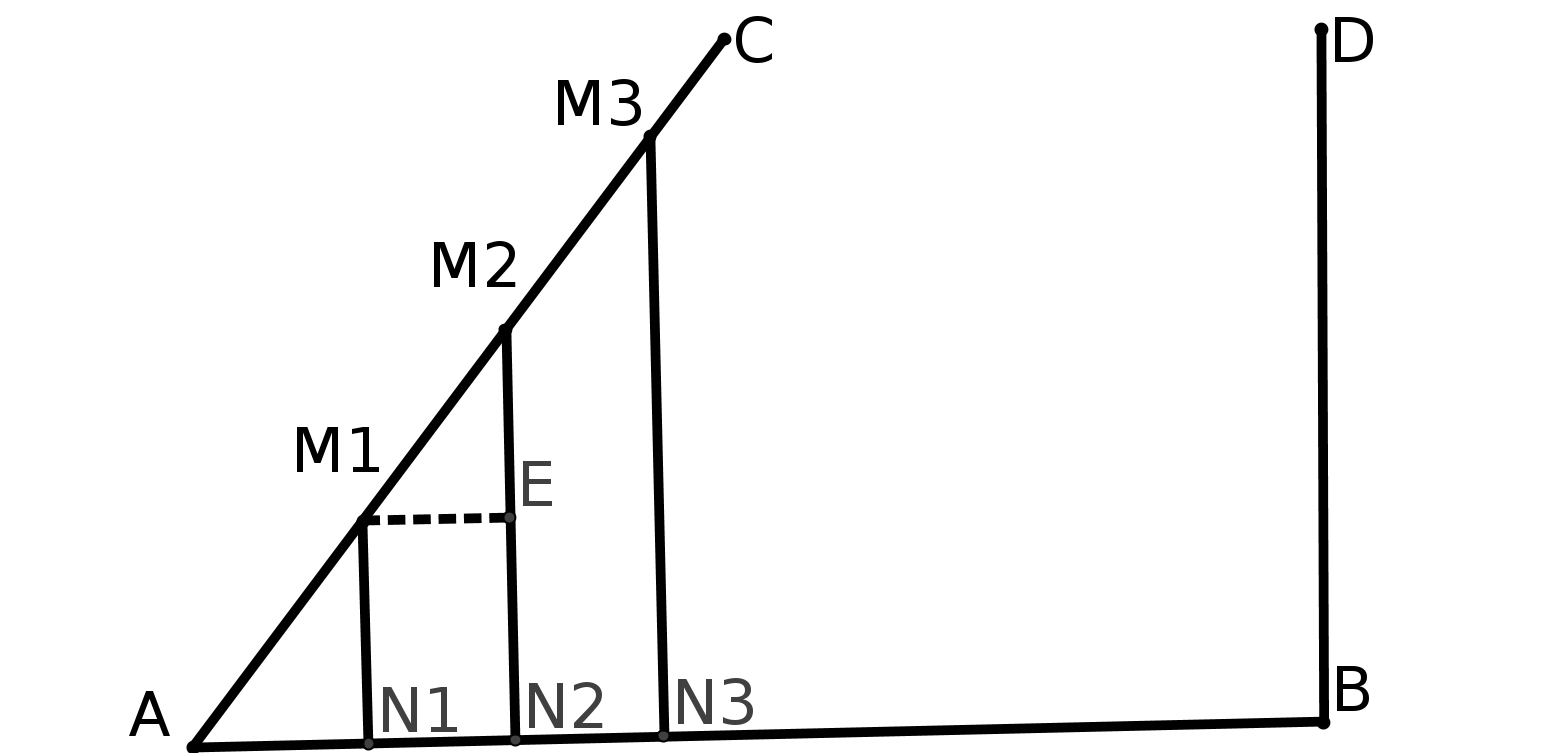
Soient ,, trois points de AC tels que . Et on trace les perpendiculaires , , .
On trace la perpendiculaire ŕ .
Le quadrilatčre M1N1N2E a trois angles droits donc (Corollaire 7.4) l’angle est droit. Donc la somme des angles et est égale ŕ un droit.
La somme des angles d’un triangle étant égale ŕ deux droits, les angles et sont égaux.
Les triangles rectangles et , ayant un côté et un angle égal, sont égaux. Donc . On en déduit que . Donc .
On démontrerait de męme que .
En construisant la suite de points
tels que on définit ainsi une
suite de segments égaux .
Il existe alors une valeur de
telle que
et ( la géométrie euclidienne
est archimédienne).
étant parallčle ŕ BD
et sont
de part et d’autre de BD donc AC coupe BD.
Démontrons maintenant P5.
Soient une droite AB tombant sur les droites AC et BD en faisant des angles plus petits que deux droits. L’un des deux angles est aigu. Supposons que c’est l’angle DBA. Alors la perpendiculaire AE ŕ BD a son pied E entre B et D (Quitte ŕ prolonger BD).
a. Si alors AC
coupe l’angle
donc AC coupe BE donc BD. (C’est une affirmation non démontrée qu’il faudrait rajoutée sous la
forme d’un postulat dans les Eléments d’Euclide, manque déjŕ indiqué ŕ l’occasion de
l’énoncé du th 21.1)
b. Si
alors AC coupe BD en E.
c. Supposons .
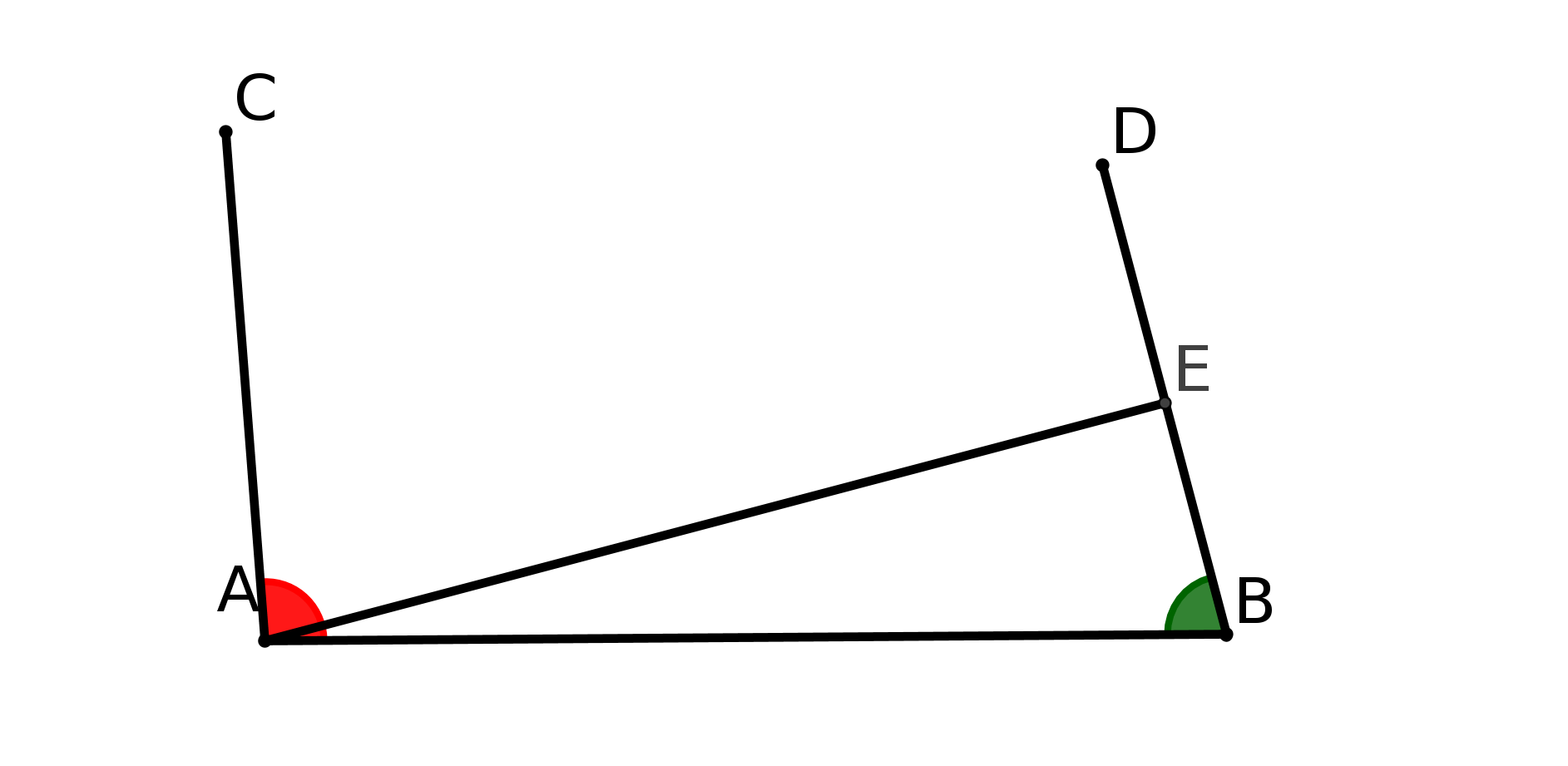
La somme des angles est égale ŕ deux droits donc 1droit et les deux angles sont aigus. Or :
droits. Donc
1 droit- 2 droits. Donc
1 droit. Donc
droit. Et d’aprčs le résultat préliminaire, DE coupe AC donc BD et AC se coupent.
Si ABDC est un S-q dans lequel les angles A et B sont droits, on suppose que C et D sont obtus.
Proposition 7.7 : sous H2, dans un S-q ABDC tel que AC=BD, on a :
et si on appelle E le point d’interchapter des diagonales on a
.
Démonstration :
1. Soient I et J les milieux respectifs de AB et CD. Alors IJ est perpendiculaire ŕ CD
(P.7.3).
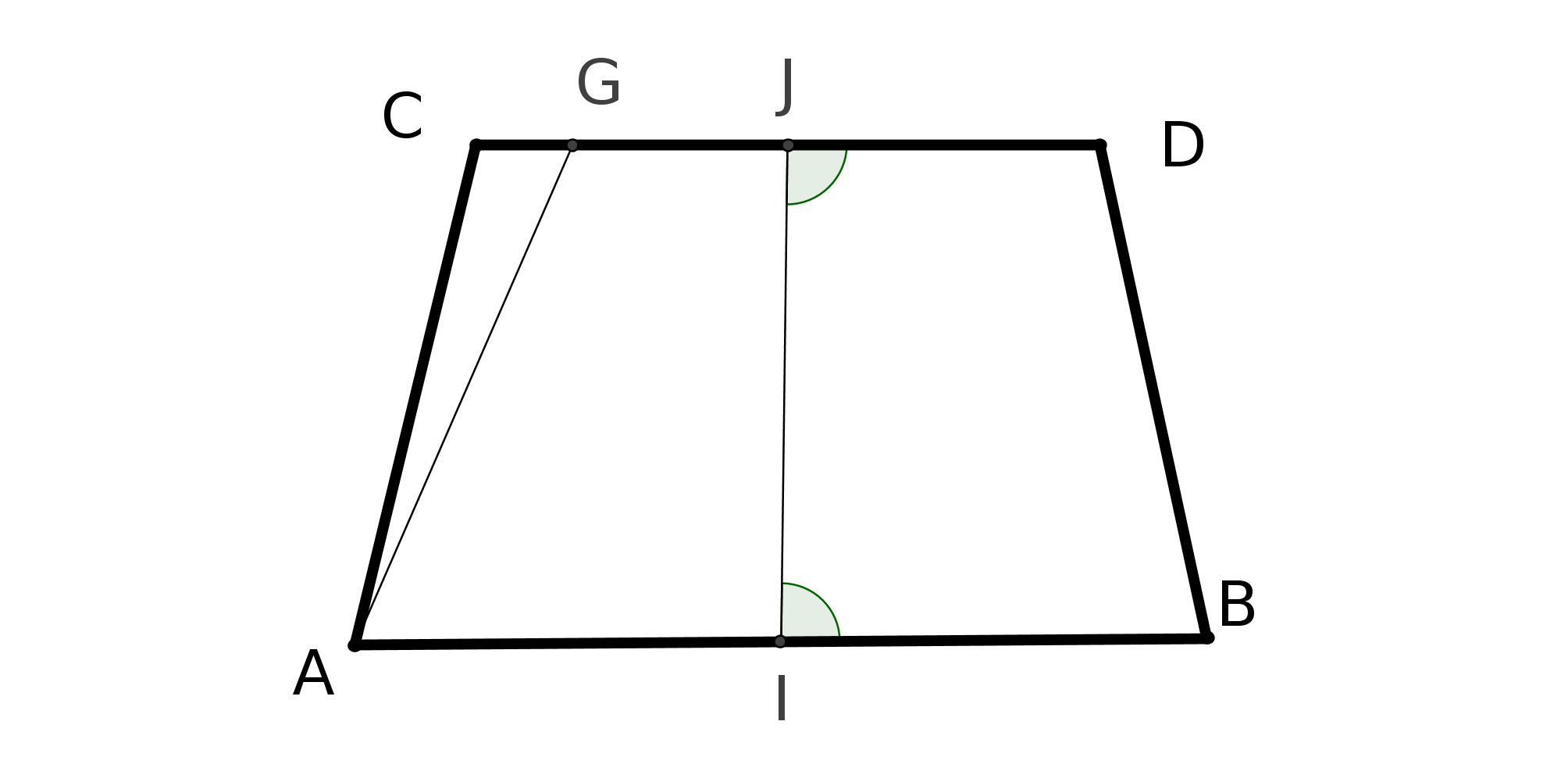
Supposons .
Soit G tel que GJ=AI et G sur CJ. Alors IJAG est un S-q donc les angles
et
sont égaux
(P.7.1). Or est aigu
puisque est droit et
est obtus puisque
est obtus. C’est
impossible puisque . Donc
contradiction et on n’a pas .
On ne peut pas avoir non plus AI=CJ : en effet IJCA serait un S-q et donc l’angle A
serait égal ŕ l’angle C d’aprčs P.7.1. L’angle A étant droit, l’angle C le serait aussi :
impossible.
On a donc
donc .
Traçons les diagonales BD et AC qui se coupent suivant un point E qui est sur IJ
(P.7.3).
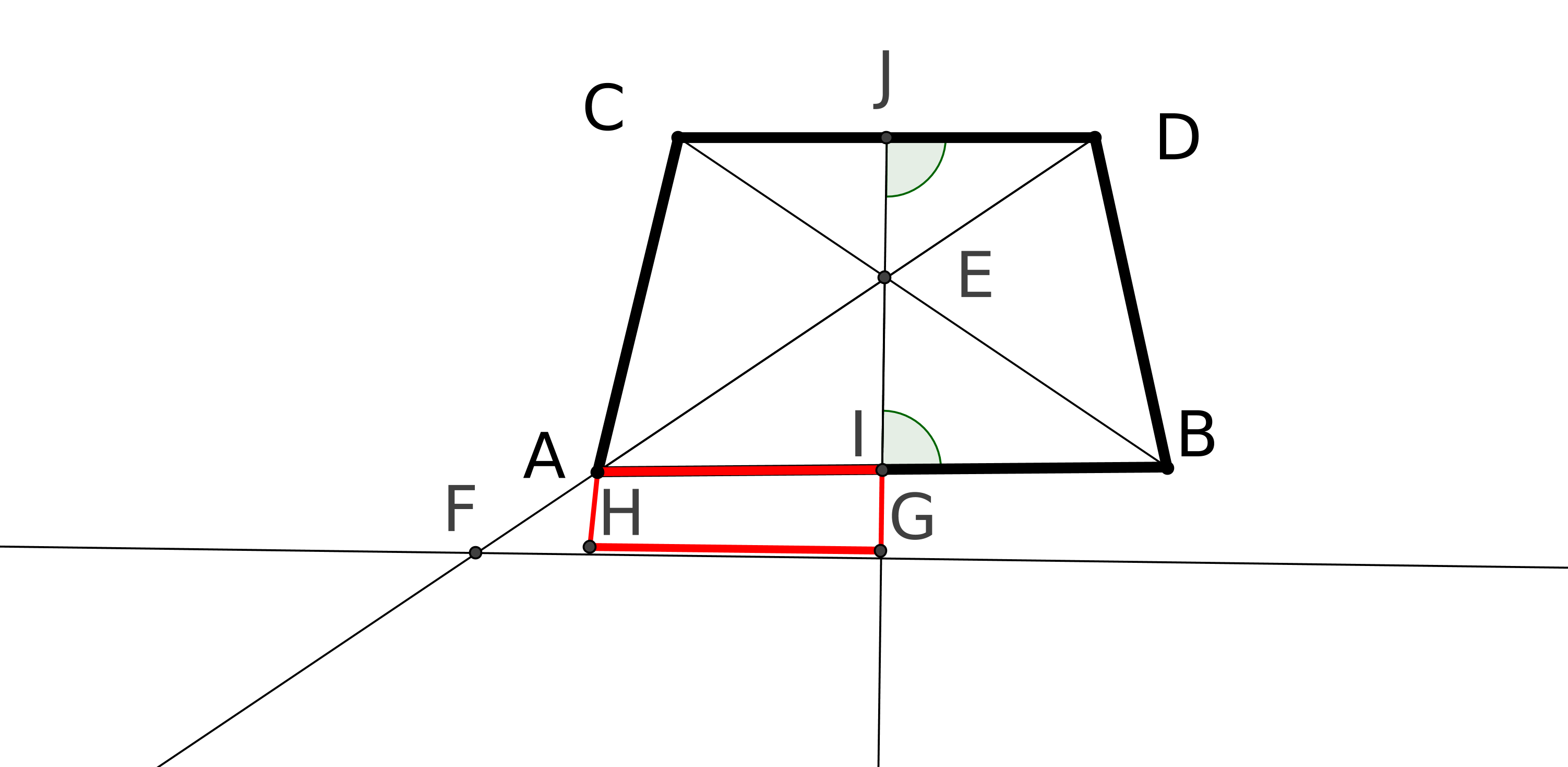
Supposons .
Soit F, le point de EA prolongée en A, tel que EF=ED et soit FG la perpendiculaire ŕ IJ. Alors les triangles EFG et JED sont égaux (Th 26.1 : deux angles et un côté égal). Donc JD=FG.
Dans le triangle JDE l’angle J est droit donc (Th17.1 : la somme de deux angles dans un triangle est inférieure ŕ deux droits) l’angle est aigu, donc aussi.
Soit H tel que AI=GH. Alors IGHA est un S-q et donc . H est sur FG et distinct de F, sinon serait obtus : en effet est droit donc est aigu donc est obtus donc et le seraient aussi. Mais serait aigu puisque est aigu. Donc, impossible.
Donc puisque
GH=AI. Donc :
impossible, puisque .
Donc .
Théorčme : si un S-q vérifie H2 il en est de męme de tous les S-q.
Démonstration :
Commençons par les lemmes suivants :
Lemme 1 : soit ABDC un S-q vérifiant H2 et tel que AC=BD. On appelle I et J les milieux respectifs de AB et CD.
1. Alors .
2. Soit E un point de CD et soit EF la perpendiculaire ŕ AB. Alors
.
Démonstration :
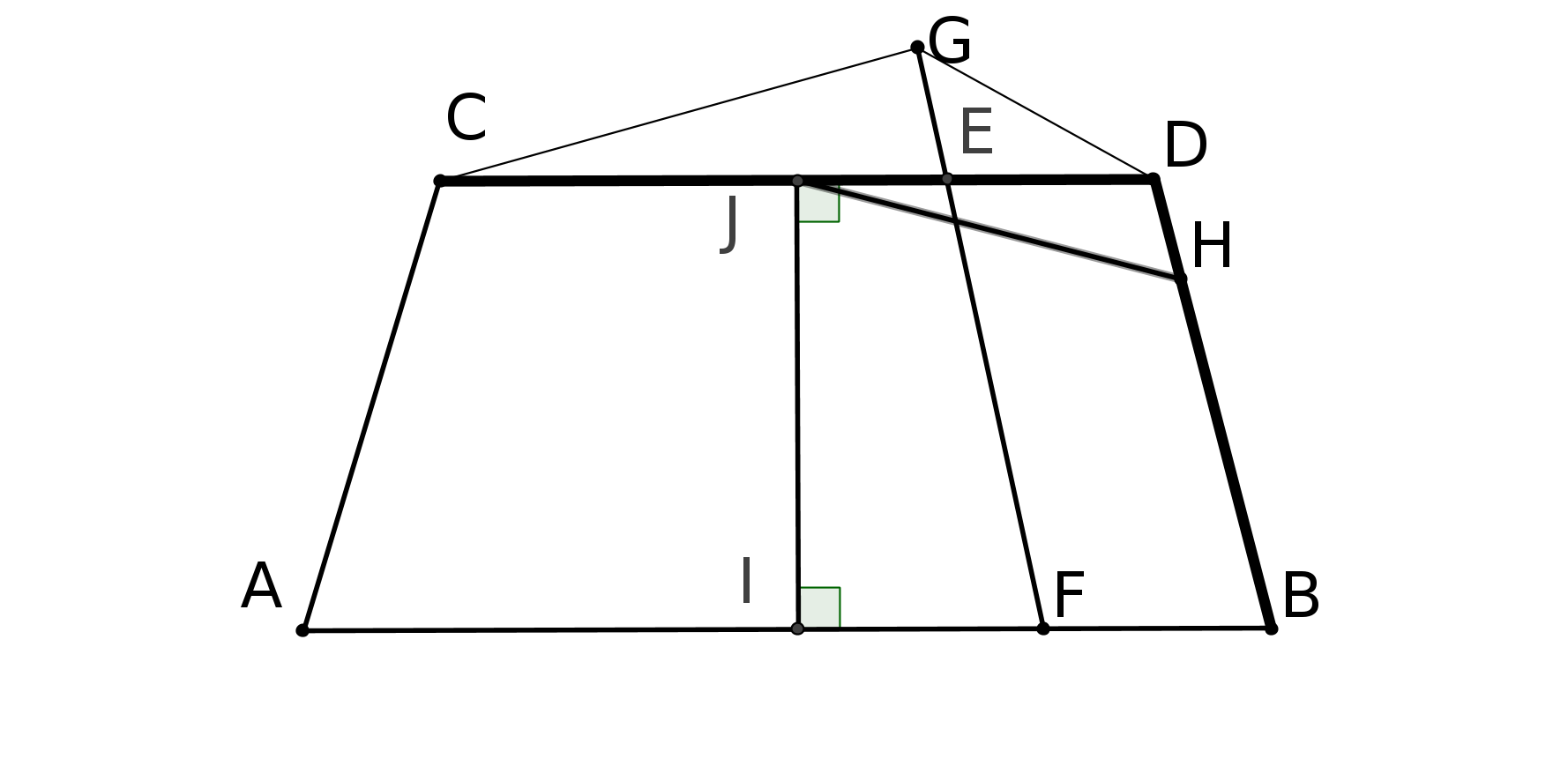
1. Supposons .
Alors il existe un point H de BD tel que IJ=BH. IBHJ est un S-q et on a
. Comme
est aigu ou droit,
l’est aussi.
Or est obtus
donc aussi :
contradiction. Donc .
2. Supposons . Soit G le point de FE prolongée tel que FG=BD. les quadrilatčres AFGC et FBDG sont des S-q donc et . Or F et G sont de part et d’autre de CD, donc et . Comme les angles et sont obtus il en est de męme de et . Donc serait plus grand que deux droits : impossible.
Si EF=BD alors EF=AC. Donc les quadrilatčres AFEC et FBDE sont des S-q donc et . Comme les angles et sont obtus il en est de męme de et : impossible.
Donc .
Lemme 2 : soit ABDC un S-q vérifiant H2 et tel que AC=BD. On appelle I et J les milieux respectifs de AB et CD.
1. Soit G le point de IJ tel que IG=AC. Alors AIGC et IBDG sont des S-q vérifiant H2.
2. Soit F un point de AB, distinct de B, et soit le point E tel que EF=AC, EF perpendiculaire ŕ
AB et C et E du męme côté de AB. Alors AFEC et FBDE sont des S-q vérifiant
H2.
Démonstration :
1. Soit la figure suivante :
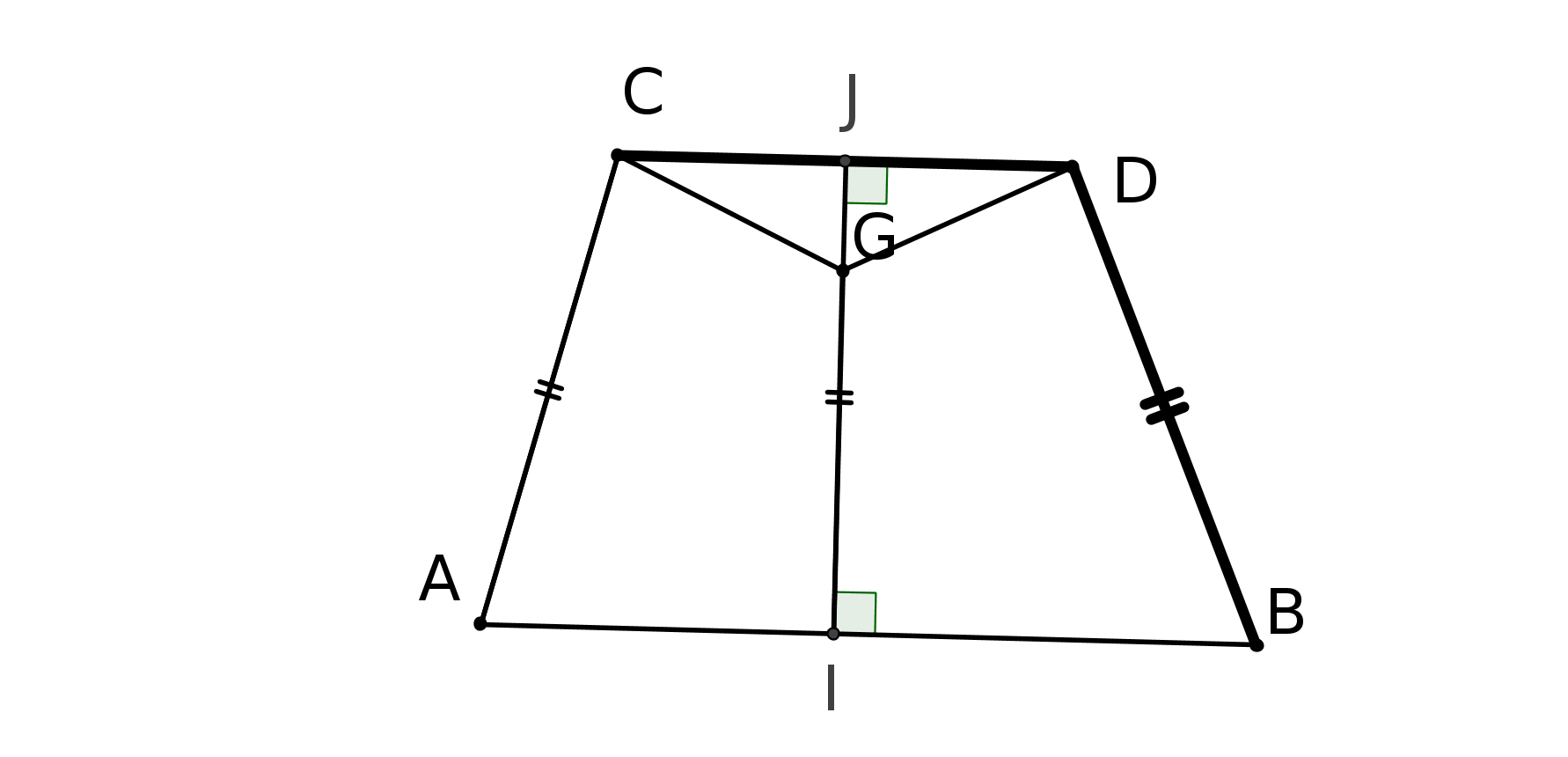
a. D’aprčs le lemme 1, IJAC donc GIJ.
b. Les quadrilatčres AIGC et IBDG sont égaux.
c. L’angle
est plus petit que deux droits. Donc le double de l’angle
est plus grand que
deux droits donc
est obtus. ainsi AIGC et IBDG sont des S-q vérifiant H2.
2. Supposons que FIB.
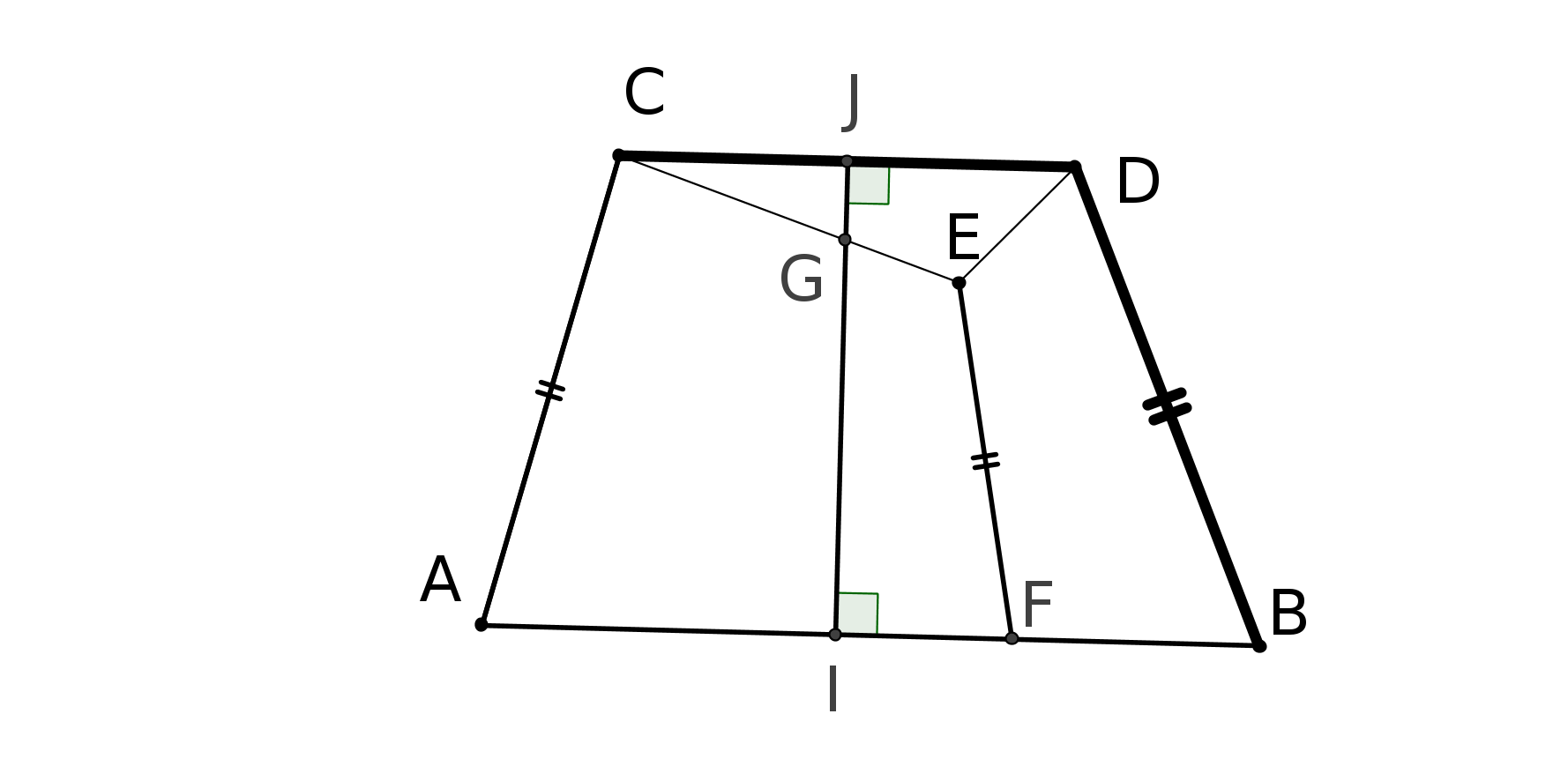
a. Si E et F sont de part et d’autre de CD alors EF couperait CD en un point H et, d’aprčs le lemme 1, FH serait plus grand que BD, donc aussi EF : contradiction. Donc E et F du męme côté de CD.
EF, IJ et BD sont parallčles (Th28.1) donc E est ŕ l’intérieur de IBDJ.
E et C sont de part et d’autre de IJ. Donc EC coupe IJ en un point G.
En utilisant l’égalité des triangles AIG et BIG, puis celle des triangles ACG et BDG, on démontre que .
Supposons
aigu. Alors l’est
aussi. donc
est aigu. Donc
les angles et
le sont aussi : impossible,
sinon serait plus grand
que deux droits. Donc
est obtus. Donc AFEC est un S-q vérifiant H2.
b. Montrons que IBDG est aussi un S-q vérifiant H2.
Soient les suites de points I, G, J telles que :
(i) I=I, J=G=J.
(ii) pour tout 0,
I est le milieu
de IB,
G est le point de
IJ
tel que IG=AC
et J est le
milieu de GD.
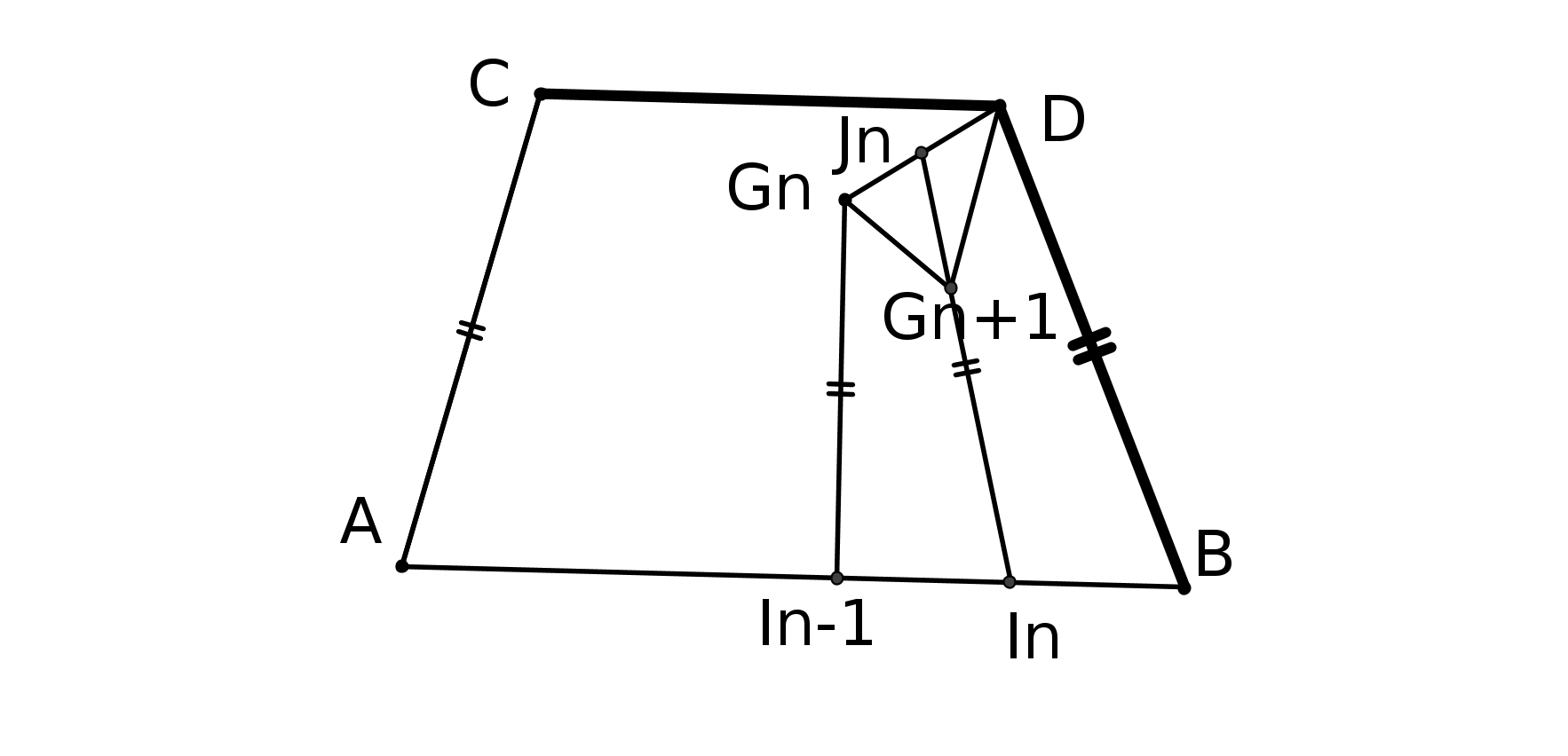
D’aprčs le 1. du lemme, IBDG et IIGG sont des S-q vérifiant H2.
Il existe tel que
FII.
Alors, comme dans le a. on démontre que FBDE est un S-q vérifiant H2.
Lemme 3 : soient ABDC et BFED des S-q tels que AC=BD=EF et tels que A, B et F sont
alignés. Si ABDC vérifie H2 alors BFED et AFEC le sont aussi.
Démonstration :
1. Si F est sur AB :
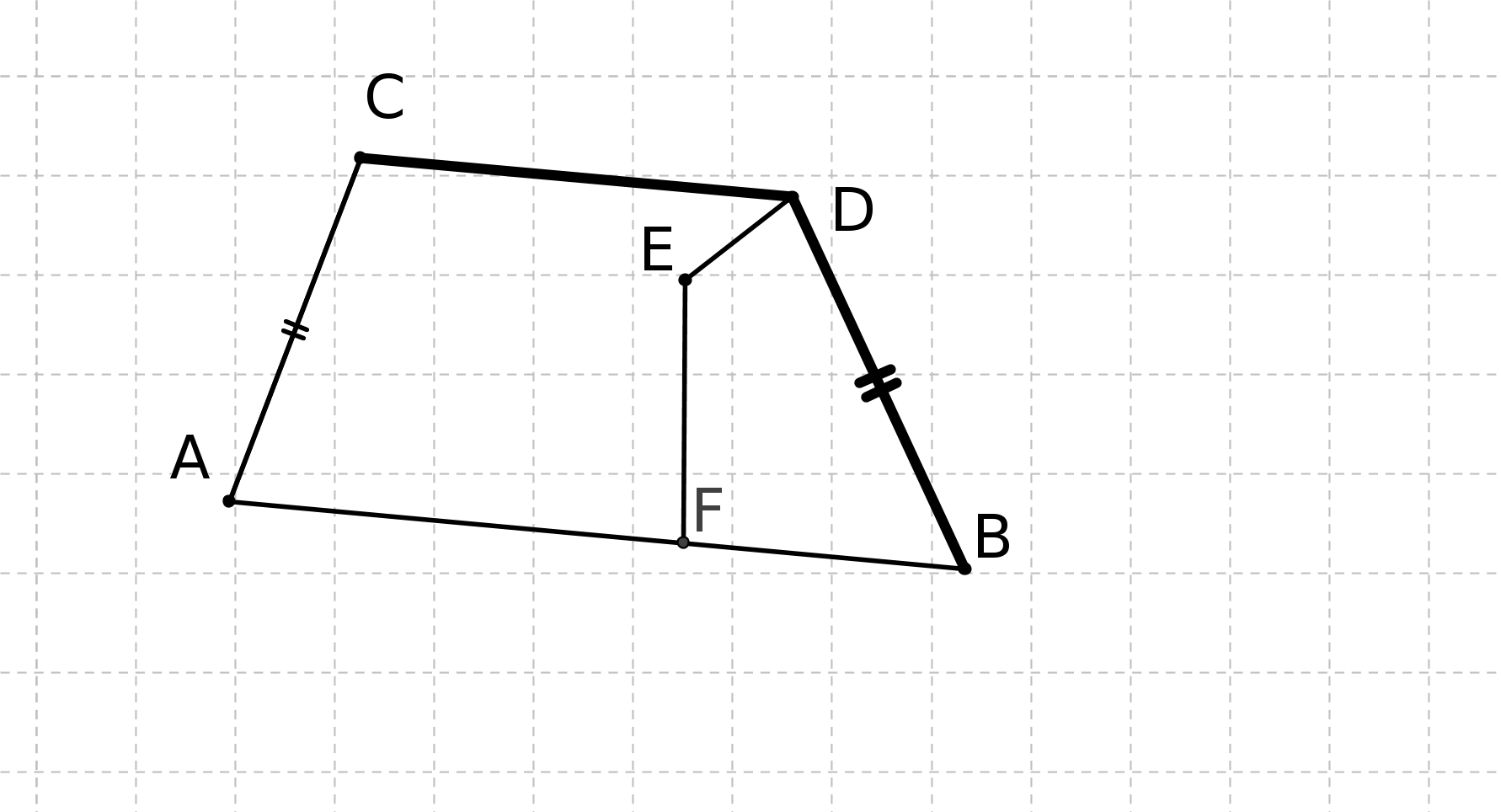
Alors d’aprčs le lemme 1, E est ŕ l’intérieur de ABDC et, d’aprčs le lemme 2 BFED et AFEC
sont des S-q vérifiant H2.
2. Si F est sur le prolongement de AB prolongée en B :
a. Si AB=BF :
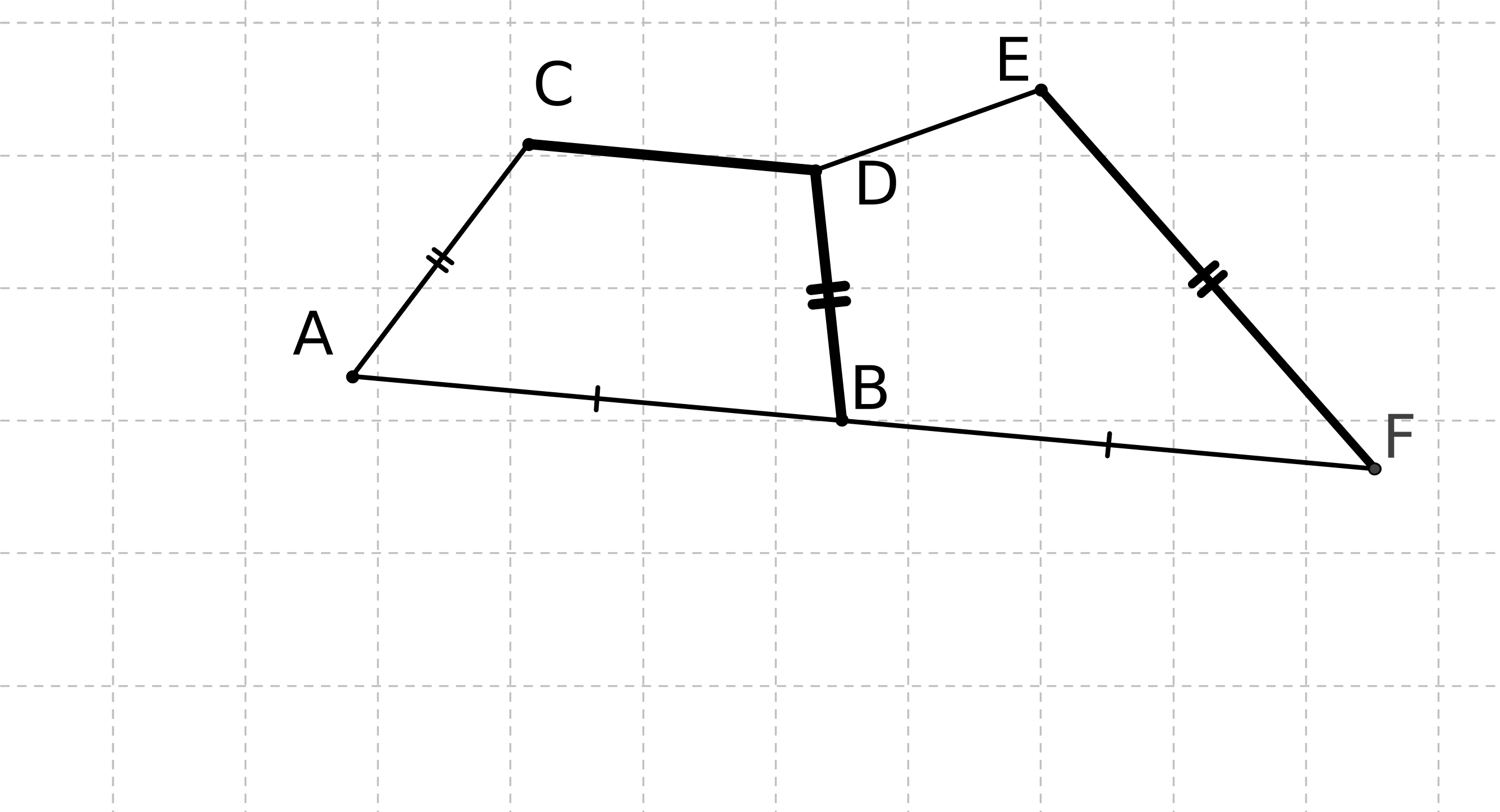
ABDC et BFED sont égaux donc BFED vérifie H2. Donc les angles et sont obtus. Donc l’angle est plus petit que deux droits. Donc la droite CD coupe l’angle.
L’angle est
obtus donc
aussi, donc AFEC est un S-q vérifiant H2.
b. Si ABBF :
On double AB autant de fois pour obtenir un S-q, AHLC, vérifiant H2 et tel que F soit sur
AH.
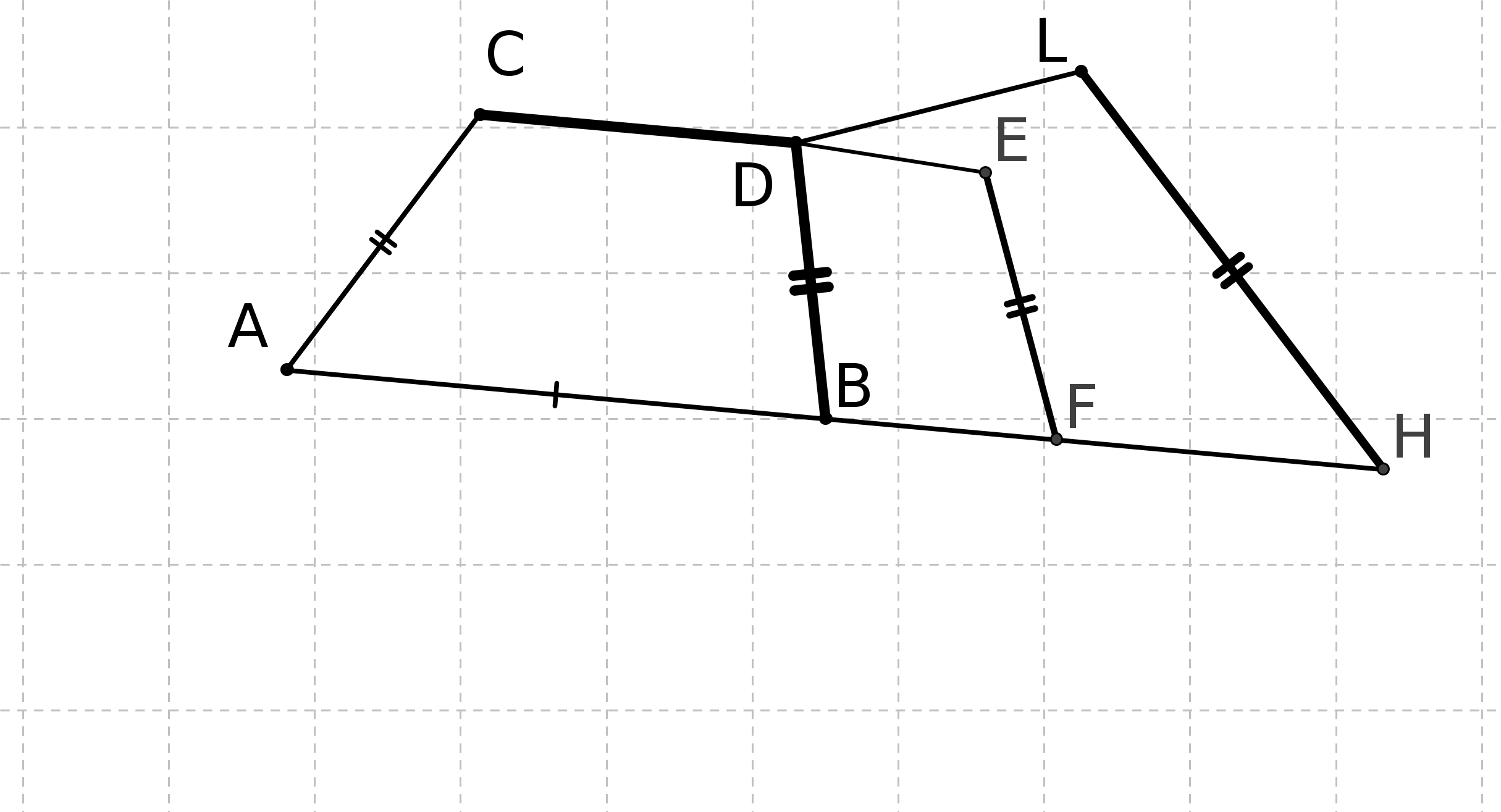
Alors d’aprčs le 1. on a le résultat souhaité.
Lemme 4 : soit ABDC un S-q vérifiant H2 et tel que AC=BD. Soient E et F les points de AC et
BD (éventuellement prolongées) tels que AE=BF. Alors le quadrilatčre ABFE est un S-q
vérifiant H2.
Démonstration :
On appelle I, J et K les milieux respectifs de AB, EF et CD.
1. Supposons que E soit sur AC.
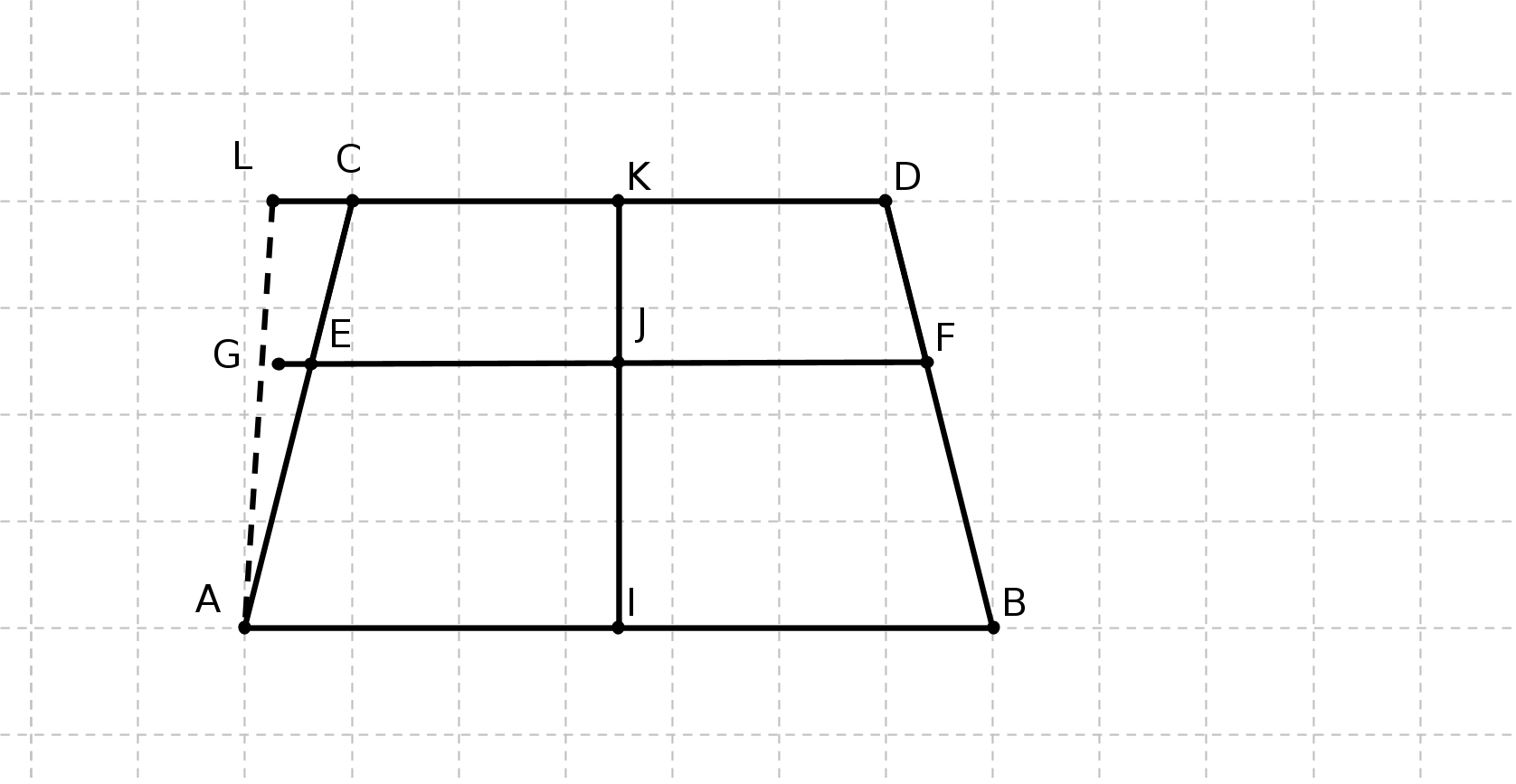
Soit L le point de CK (éventuellement prolongée en C) tel que KL=AI. Alors AIKL est un S-q. Si L est sur CK alors est inférieur ŕ un droit et est supérieur ŕ un droit. C’est impossible puisque ces deux angles sont égaux. Donc C est sur LK et est obtus, donc AIKL est un S-q vérifiant H2.
Soit G le point de EJ (éventuellement prolongée en E) tel que GJ=AI. D’aprčs le lemme 2 G est ŕ l’intérieur de AIKL et AGJI est un S-q vérifiant H2. Donc et sont obtus. Comme est droit, E est sur GJ.
E est sur GJ et
est obtus donc
aussi. Donc ABFE est un S-q vérifiant H2.
2. Supposons que E soit sur AC prolongée.
a. Soit L un point de CK, prolongée en C, tel que AI=LJ. On a
(P.7.7) et
droit,
donc
est obtus et IKLA est un S-q vérifiant H2.
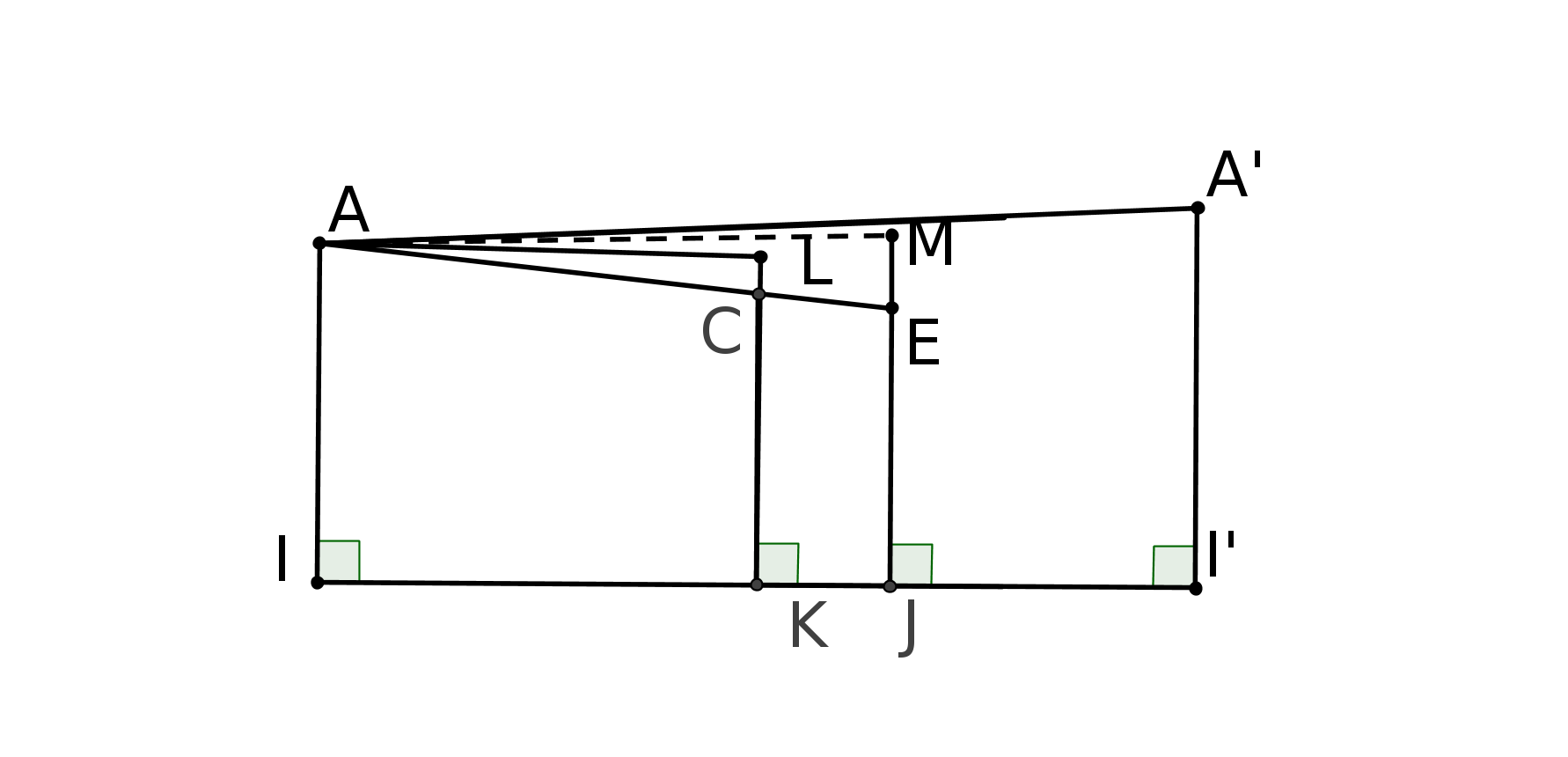
Il existe un entier et un point I’ tels que II’=IK et II’IJ. Soit A’ tel que AI=A’I’ et A’I’ perpendiculaire ŕ II’. D’aprčs le lemme 3, II’A’A est un S-q vérifiant H2.
L’angle est obtus et est droit donc II’A’A contient AC. II’ contient J donc II’A’A contient E.
Soit M, comme indiqué sur la figure, tel que MJ=AI. Alors, d’aprčs le lemme 3, IJMA est un
S-q vérifiant H2, donc IAM est obtus donc plus grand que IAE. Donc E est sur JM, donc AEJ est un
angle obtus. Donc ABFE est un S-q vérifiant H2.
Démonstration du théorčme :
Soit ABDC un S-q vérifiant H2 tel que AC=BD et soit A’B’D’C’ un S-q tel que A’C’=B’D’.
Soient G, F et H tels que
BG=A’B’, et A,B et G alignés dans cet ordre.
GF=B’D’, GF perpendiculaire ŕ AB, F et C du męme côté de AG,
HG=B’D’, H sur BD ou son prolongement.
1. Les quadrilatčres BGFH et AGFE sont égaux.
2. Soit I le point de GF tel que IG=BD. Alors, d’aprčs le lemme 3, BGID est un S-q vérifiant
H2 et donc, d’aprčs le lemme 4, BGFH aussi. Donc A’B’C’D’ est un S-q vérifiant H2.
Proposition 7.8 : Soit ABDC un S-q vérifiant H2 tel que AC=BD. Soit E et F deux points respectivement de AC et BD tels que AE=BF. Alors :
1. Les diagonales de EFDC se coupent en un point appartenant ŕ IJ, la médiatrice commune de AB et CD.
2.
et
Démonstration :
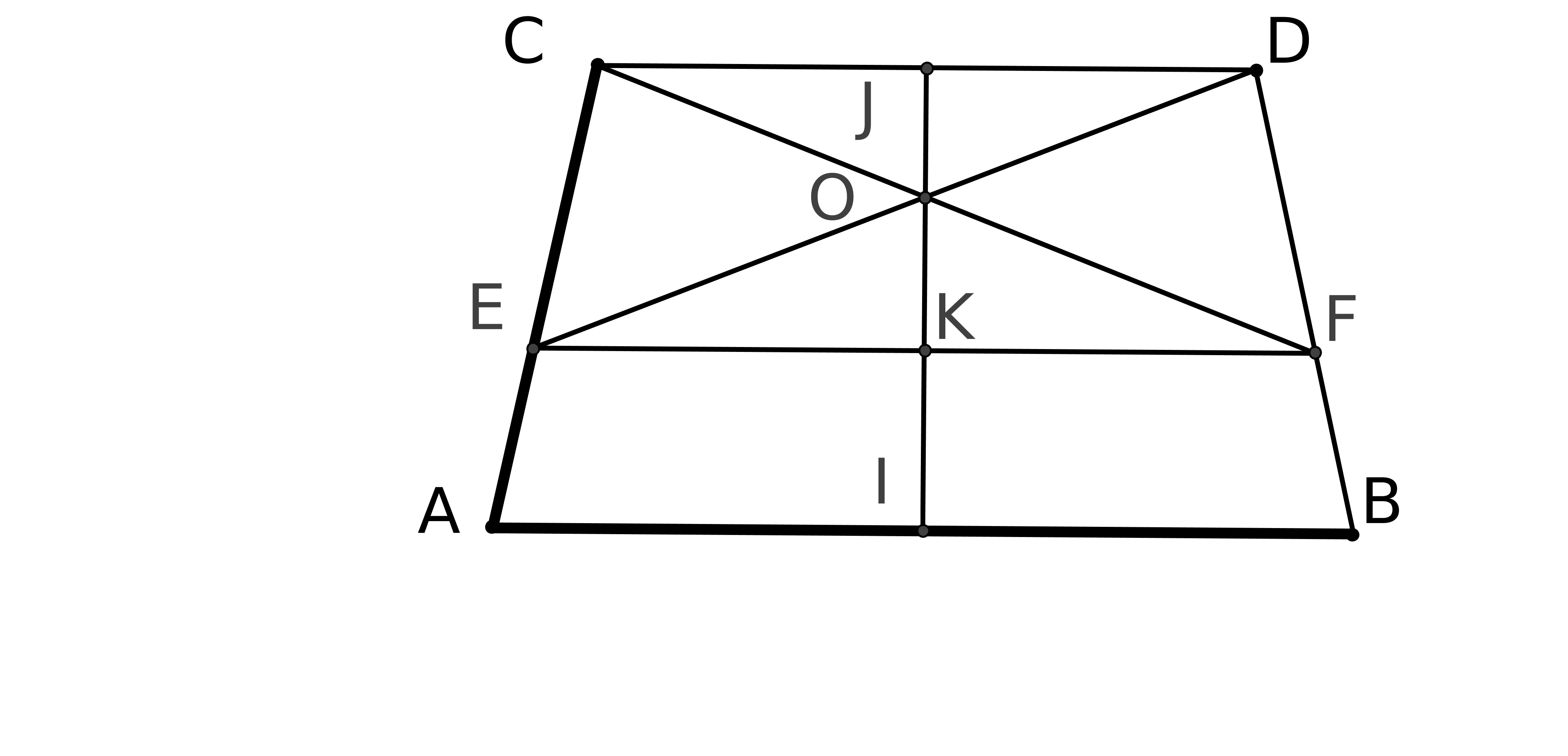
1. a été démontré en P.7.3.
2.
étant aigu (lemme 4), on démontre, comme pour P.7.7, que
.
Proposition 7.9 : la somme des angles dans un triangle est supérieure ŕ deux droits.
Démonstration :
1. On prend un triangle ABC rectangle en A. Puis on trace une perpendicu -laire BD égale ŕ
AC.
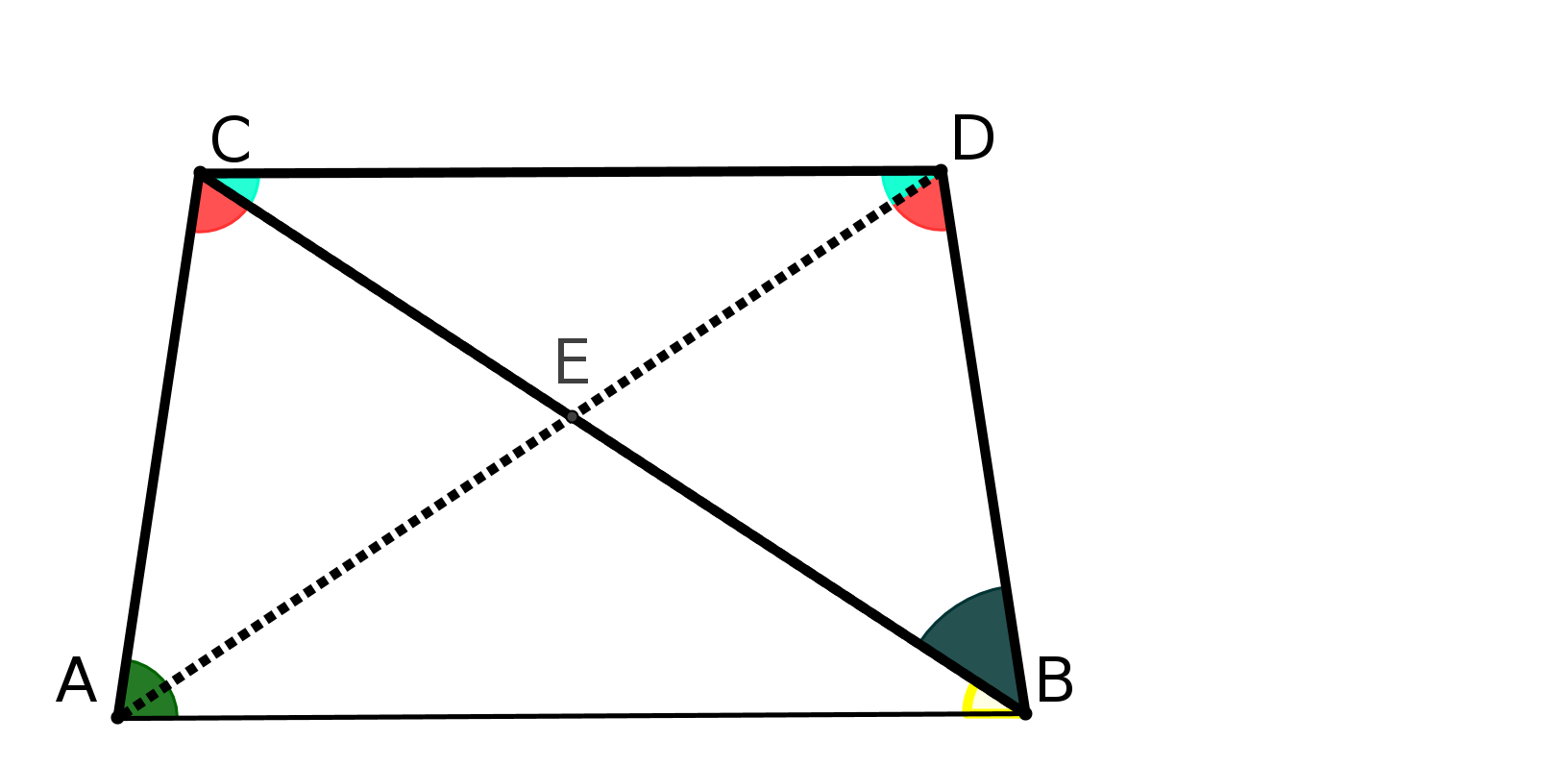
On pose : et .
On appelle S la somme des angles de ABC. On a :
.
Donc
. Dans le triangle BED, donc (Th19.1) :
donc et on a : donc
. Donc . Donc
.
Ainsi la somme des angles est supérieure ŕ deux droits.
2. Si ABC est un triangle quelconque on se ramčne ŕ deux triangles rectangles.
Proposition 7.10 : sous H2, P5 est vrai.
Comme P5 implique que la somme des angles est égale ŕ 2 droits, sous l’hypothčse H2, P5 serait faux.
Mais Saccheri, sous H2, arrive ŕ démontrer P5 et donc rejette H2 !
Refaisons une démonstration semblable ŕ la sienne : soit une droite AB coupée par les droites AC et BD.
BD est perpendiculaire ŕ AB et AC coupe AB suivant un angle aigu.
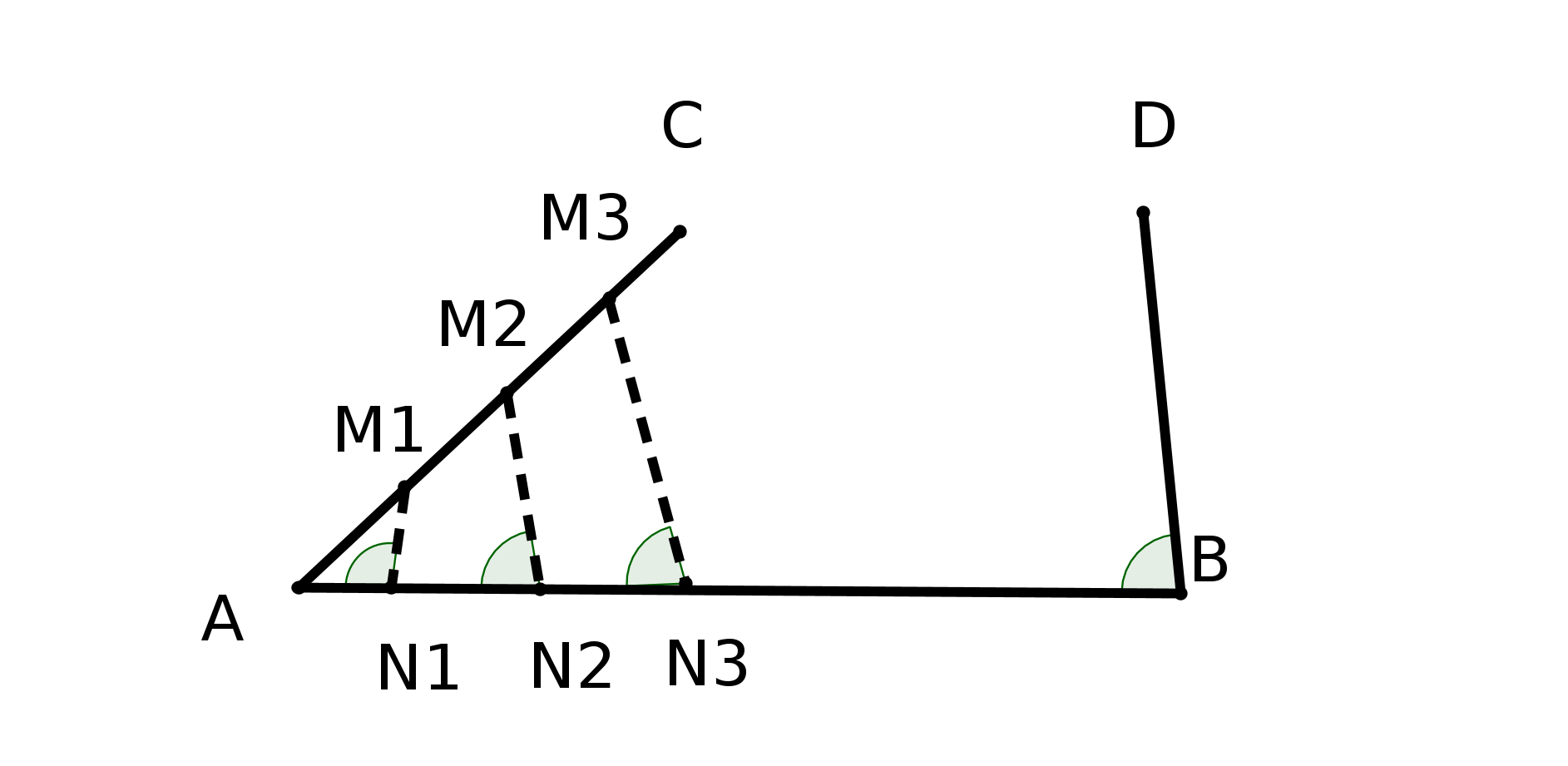
Soient ,, trois points de AC tels que .
Puis traçons les perpendiculaires,, et ŕ BD. Donc d’aprčs le th 28.1 ces droites sont parallčles entre elles et ŕ BD.
Montrons que .
Reprenons la figure et traçons la perpendiculaire AH ŕ AB telle que .
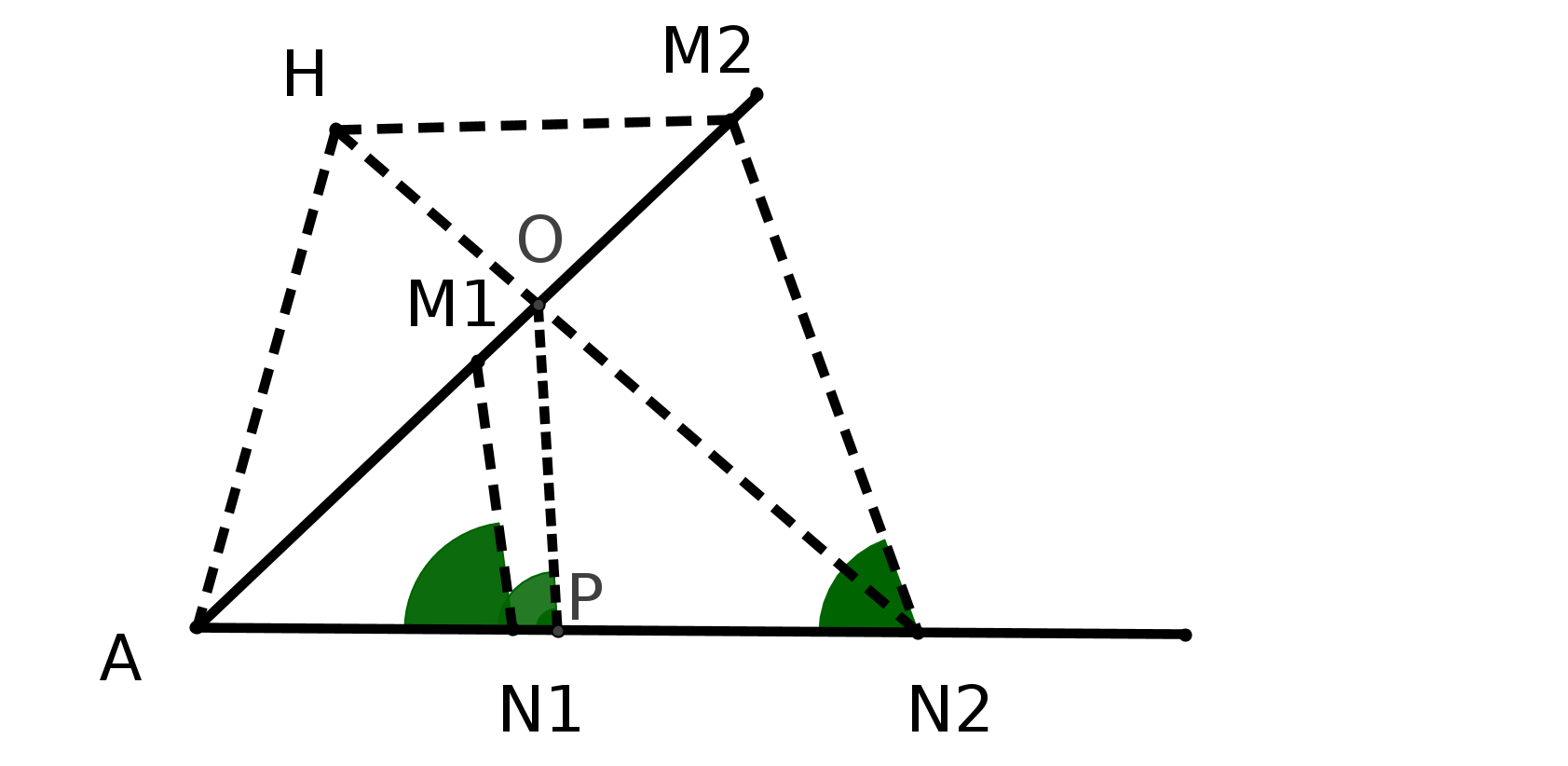
On appelle O le point d’interchapter de et . On a vu (Prop.7.7) que donc est sur OA.
Appelons P le milieu de . D’aprčs la proposition 7.3 la droite OP est perpendiculaire ŕ .
Donc les droites
et sont
parallčles et ,
ne coupant pas ,
est sur
OP, donc .
Montrons, maintenant, que :
On trace le quadrilatčre de Saccheri puis on prend le point F tel que .
Alors (prop.7.8).
Donc et
donc est sur
. Appelons P le milieu de
. Comme précédemment,
on montre que .
En construisant une suite de points
tels que on définit ainsi une
suite croissante de segments .
Il existe alors une valeur de
telle que
et.
étant parallčle
ŕ BD
et sont
de part et d’autre de BD donc AC coupe BD.
Démontrons maintenant P5.
Soit une droite AB tombant sur les droites AC et BD en faisant des angles plus petits que deux droits. L’un des deux angles est aigu. Supposons que c’est l’angle . Alors la perpendiculaire AE ŕ BD a son pied E entre B et D (quitte ŕ prolonger BD).
La somme des angles du triangle BAE est supérieure ŕ deux droits donc . Or :
. Donc
. Donc
. Donc
. Et
d’aprčs le résultat précédent, DE coupe AC donc BD et AC se coupent.
Conclusion : Finalement sous H2, la somme des angles dans un triangle est supérieure ŕ deux droits implique... que la somme des angles dans un triangle est égale ŕ deux droits : il y a donc incohérence.
Ainsi soit il y a une démonstration fausse dans ce qui précčde, soit H2 est incompatible avec la
géométrie neutre.
Remarque 1 : On peut remarquer que la démonstration précédente fonctionne męme si...la somme des angles que fait AB avec AC et BD est égale ŕ deux droits donc cela signifie que AC et BD se coupent en un point E et que dans le triangle ABE, la somme de deux des angles est égale ŕ deux droits.
cela contredit le théorčme 17 du livre 1 qui affirme que la somme de deux angles dans un triangle est inférieure ŕ deux droits.
Or le théorčme 17 repose sur le théorčme 16 qui repose lui-męme sur le théorčme 4. Or le théorčme 4 fait intervenir l’axiome 8, qui affirme que deux figures que l’on peut ajuster sont égales et P6 qui implique que deux droites ayant deux points communs sont confondues.
Il faudra regarder si H2 est compatible avec P6.
Remarque 2 : dans les démonstrations qui précčdent on a utilisé le fait qu’il existait des droites parallčles grâce au Th27.1. Mais on démontre que deux droites vérifiant les hypothčses du Th 27.1 sont sécantes. Donc il y a un problčme avec le parallélisme.
On a vu que dans la géométrie que l’on a développée sur une sphčre, dans laquelle H2 est
vérifiée, qu’il n’existait pas de parallčles.
Remarque 3 : pour démontrer qu’il existait tel que on a utilisé l’axiome d’Archimčde qui nous dit que quelle que soient les grandeurs A et B il existait un nombre entier tel que . Cela implique que l’on peut rendre toute grandeur aussi grande que l’on veut.
Cet axiome n’est pas explicité dans les Eléments d’Euclide mais il est utilisé implicitement. Donc on peut considérer que son utilisation est légitime.
A noter que Hilbert dans son livre "Fondement de la géométrie" de 1899 établit une
géométrie non archimédienne.
Remarque 4 : on a utilisé P2 lorsque l’on a construit nos suites de points. Mais on l’a utilisé dans le sens oů on pouvait, en distance, prolonger une droite autant que l’on veut.
Au niveau euclidien ceci est implicite bien que l’on n’ait défini aucune notion de distance (toujours parce que l’on ne dispose pas des nombres irrationnels !).
Cependant P2 nous dit que l’on peut "faire sortir toute droite sur une droite de maničre
continue". "De maničre continue ne signifie pas forcément que l’on peut prolonger une
droite autant, en distance, que l’on veut. Par exemple, si on prend l’intervalle ouvert
] ;
1[ on peut le prolonger continűment vers 0 mais sa longueur restera plus petite que 1.
Reprenons la démonstration pour démontrer P5 sans utiliser le parallélisme des
droites.
Proposition 7.11 : deux droites quelconques sont sécantes. Ainsi, sous H2, il n’existe
pas de droites parallčles.
Soient deux droites AB et ED. Soit C un point de ED tel que CA est perpendiculaire ŕ AB. On peut supposer que l’angle ACD est inférieur ou égal ŕ 1 droit. Sinon c’est l’angle ECA.
Puis les points , ,...,, de AB tels que .
Puis des points , ,...,, on trace les perpendiculaires ŕ (Th11.1). Elles coupent CD en , ,...,.
Cette construction est possible. En effet : Si on trace de la perpendiculaire ŕ AB égale ŕ AC, on obtient un quadrilatčre de Saccheri donc est obtus, donc CD est contenue dans l’angle et donc CD coupe soit AB, et le problčme est terminé, soit en et on continue, en faisant le męme raisonnement avec ,... , tant que CD ne coupe pas AB.
On dira que le point est au dessus de si et sont du męme côté des AB.
1. Montrons que tant que est au dessus de .
On a sinon l’angle serait obtus. Donc l’angle est obtus. Donc l’angle est aigu.
De męme
.
2. Soient les points I et J tels que , .
Montrons que .
La somme des angles d’un triangle étant supérieure ŕ deux droits, la somme des angles du quadrilatčre est supérieure ŕ quatre droits donc on a :
deux droits. D’oů : deux droits.
Donc .
donc . (1)
De plus la proposition 7.3 implique que est la médiatrice de et de donc .(2)
De (1) et (2) on tire .(2)
Comme
on obtient
donc .
3. Montrons que .
On a . Donc
. Donc
. Donc
. Donc
.
Or est obtus donc donc
.
Donc .
Donc .
4. Posons .
supposons que pour tout tel que , est au dessus de
Montrons que pour tout , , on a :
et
.
On a : . Donc .
Donc
En faisant, comme dans 1., 2. et 3., on peut démontrer :
pour tout , , on a .
Donc, par récurrence, .
Et donc, toujours par récurrence, on a :
.
5. Montrons que les droites sont sécantes.
Il existe tel que, pour tout , , , et .
Ceci signifie que n’est
pas au dessus de , donc que les
droites CD et AB se coupent en
ou en un point situé entre
et .
Proposition 7.12 : H2 est incompatible avec P6.
Démonstration :
Prenons deux droites AB et CD admettant une perpendiculaire commune. Ce qui est possible, puisque il suffit d’appliquer deux fois de suite le th.11.1.
Alors, d’aprčs la démonstration précédente, AB et CD se coupent en deux points et donc
entourent un domaine : cela contredit P6.
Proposition 7.13 :
1. Deux droites quelconques sont sécantes en deux points.
2. Soient deux droites se coupant en deux points O et O’. Quelles que soient les droites et leurs deux points d’interchapter, A et A’, on a : AA’=OO’. On appellera pôles ces deux points.
3. Si deux droites se coupent en deux points A et A’ elles n’ont pas d’autre point
commun entre A et A’ et elles ont une perpendiculaire commune et une seule entre A et
A’
Démonstration :
1.Soient deux droites ayant une perpendiculaire commune AB se coupant en deux points O et O’.
Alors les triangles OAB et O’AB sont égaux.
En effet les triangles OAB etO’AB ont deux angles égaux et un côté égal (Th26.1).
Dans tout ce qui suit on se donne deux droites ayant une perpendiculaire commune
AB et se coupant en O et O’.
2.Si une droite d passe par O , alors elle passe par O’.
d et AB étant deux droites elles sont sécantes en un point I.
A. Supposons que I soit entre A et B. On peut supposer sinon on raisonne ŕ partir de B. Soit J tel que et joignons I, J ŕ O’.
a. Les triangles AIO et AIO’ sont égaux ainsi que les triangles AJO et AJO’ (Th4.1), donc .
On a , , . Donc les triangles AIO’et OIJ sont égaux (Th4.1). donc et 1 droit.
b. On a puisque , et . Donc les triangles AIO et OIJ sont égaux. Donc 1 droit puisque A,I et J sont alignés.
c.Donc les triangles AIO et AIO’ sont égaux. Donc 1 droit donc O,I et O’ sont alignés.
Donc la droite d, c’est-ŕ-dire OI, passe par O’ et elle est perpendiculaire ŕ AB.
B. Supposons que I soit ŕ l’extérieur de AB, du côté de B et soit J tel que
.
a. Si :
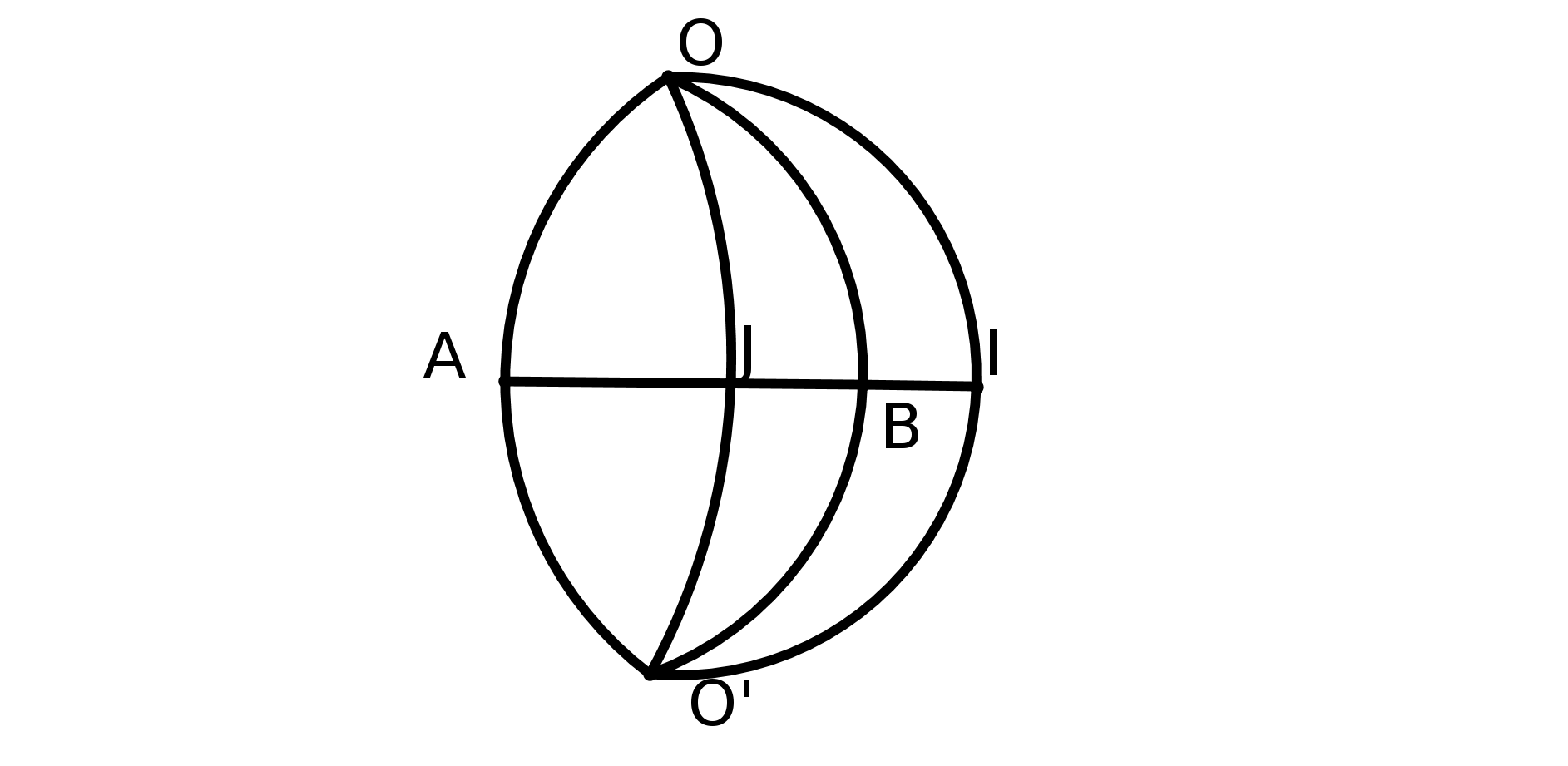
les triangles BJO et OIB sont égaux (un angle égal et deux côtés égaux). Donc 1 droit (puisque OJ est perpendiculaire ŕ AB)
Et, (Th4.1), les triangles O’IB et OIB sont égaux, donc les points O, I et O’ sont alignés. Donc
d, c’est-ŕ-dire OI, passe par O’.
b. Si .
On divise en autant de segments de męme longueur, ,..., , tels que .
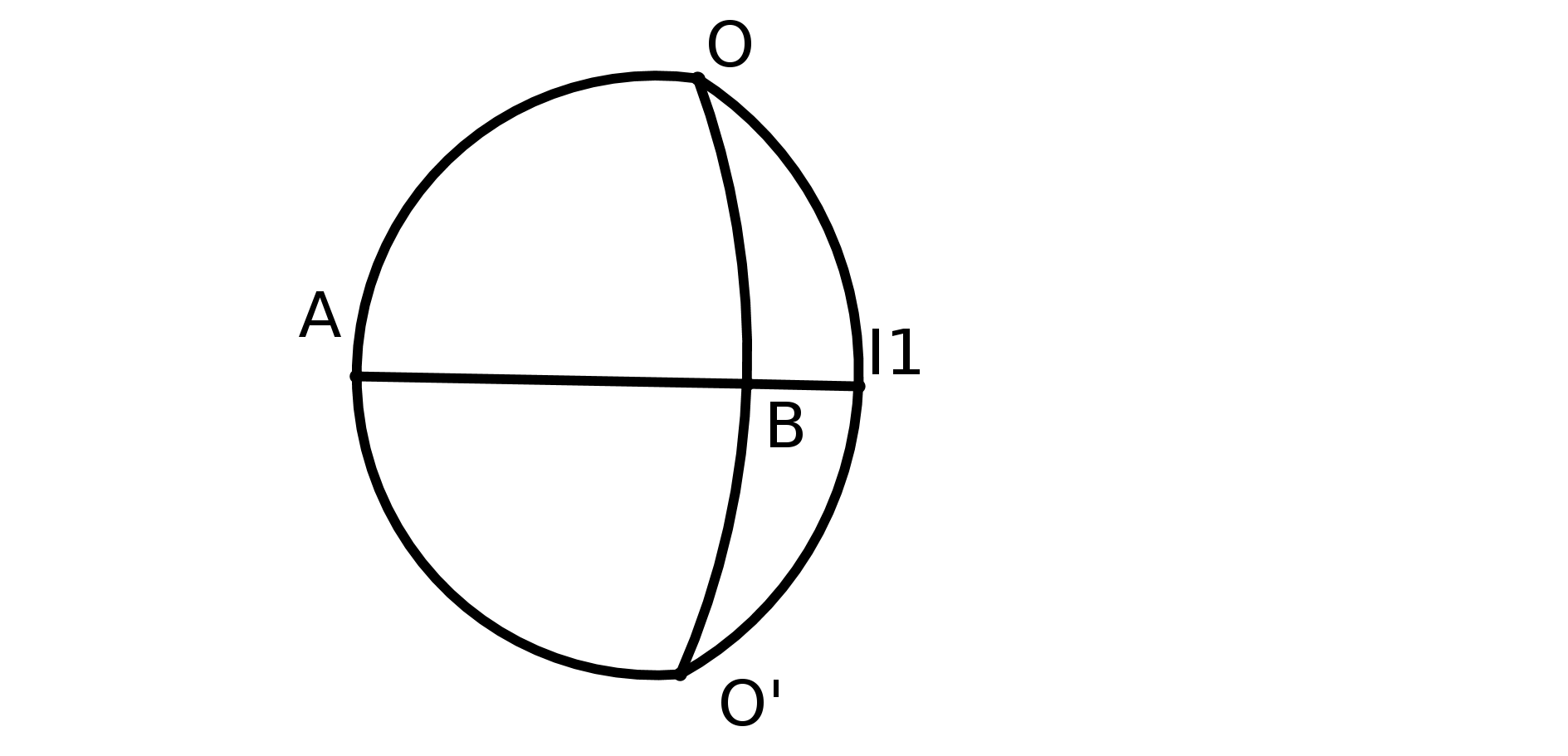
Alors, comme précédemment, on démontrera que la droite
passera par O’ et qu’elle sera perpendiculaire ŕ AB. Puis, pour
, on recommencera le męme
raisonnement en partant de
et ainsi de suite jusqu’ŕ I.
3. Soient deux droites sécantes en un point C, CD et CE. Montrons qu’elles sont sécantes en
deux points.
Soient D’ et E’ de maničre que
et OD’=CD et OE’=CE (Th2.1 et Th23.1). les deux droites passant par O passent
aussi par O’. Donc les droites CD et CE se coupent en un autre point, C’, que C et
.
4. Deux droites ont une perpendiculaire commune et une seule.
D’aprčs la démonstration faite en 2. et en 3. deux droites se coupant en deux points ont une perpendiculaire commune.
Et d’aprčs la démonstration faite en P7.12, les deux pôles sont construits de telle maničre qu’il ne peut exister d’autre point d’interchapter entre les deux pôles.
Il ne peut y avoir d’autre perpendiculaire commune entre ces deux points. En effet, soit une autre
perpendiculaire, FG, ŕ la droite AB. Alors on démontrerait comme dans P7.12 que l’angle
est
obtus et non droit.
Définition : Quels que soient les pôles O et O’ et les pôles A et A’, on a démontré qu’une
droite égale ŕ AA’ passant par O, est égale ŕ une droite joignant O ŕ O’. On prendra OO’
comme unité de mesure : on posera donc OO’=1.
Proposition 7.14 : sous H2, les droites sont finies de longueur 2.
Démonstration :
Soient O et O’ deux pôles.
1. Soient deux points O et C et une droite passant par O et C. Si
alors il
passe une droite et une seule par O et C, sinon O et C seraient deux pôles.
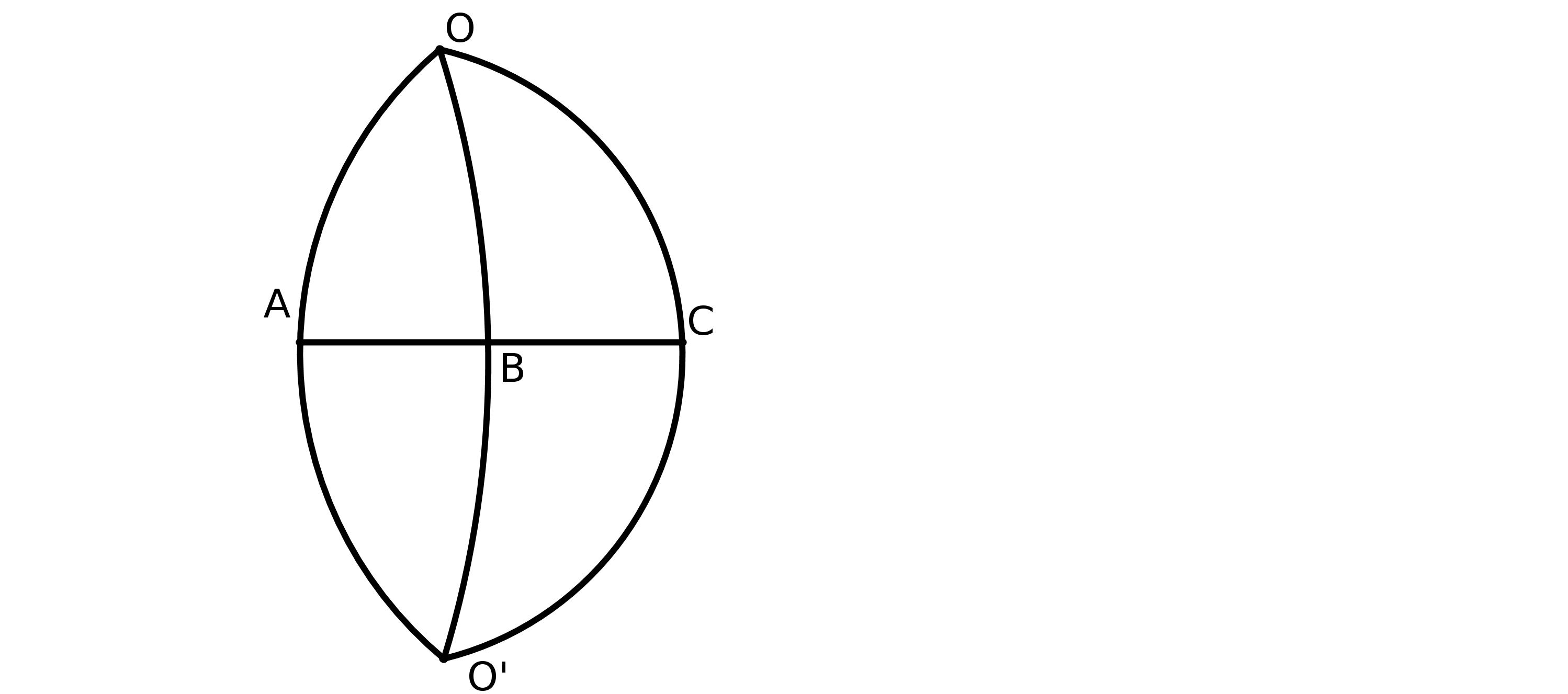
2. Soient deux droites perpendiculaires OA et OB. Elles se coupent aussi en O’ et on suppose que AB est leur perpendiculaire commune.
On a alors . Soit C le point tel que B soit le milieu de AC. Cette construction est possible puisque, une droite passant par deux pôles est au moins de longueur .
Alors les triangles OAB et OBC, ayant un angle égal et deux côtés égaux, ont leurs bases OA et OC égales. Donc . Les points O et C n’étant pas deux pôles, O et A non plus, les triangles OAB et OBC ont aussi leurs angles égaux. Donc 1 droit. Donc les points A, O et C sont alignés.
On démontrerait de męme que A, O’ et C sont alignés. Donc la droite OA prolongée est finie et de
longueur .
Question : les théorčmes 1 ŕ 26 peuvent-ils ętre employés sous ces conditions ?
1. Pourquoi P5, dans les Eléments d’Euclide, implique que la somme des angles dans un triangle
est égale ŕ deux droits ?
On démontre, dans le théorčme 32, que la somme des angles est égale ŕ deux droits en
utilisant le théorčme 28 qui affirme l’existence de droites parallčles puis le théorčme 29 qui
utilise P5. Or, ŕ partir du moment oů on démontre que, sous H2, le parallélisme n’existe pas les
théorčmes 32 et 29 tombent, P5 tout seul ne pouvant pas impliquer le théorčme
32.
2. Ainsi P5 n’est pas contradictoire avec H2 mais la démonstration faite (inspirée de celle faite
par Saccheri) pour démontrer que H2 implique P5 est fausse puisqu’elle repose sur le
parallélisme.
Y a-t-il d’autres démonstrations fausses que l’on a fait sous H2 ? Il faut s’intéresser ŕ
P6.
P6 n’est pas vérifiée sous H2 puisque deux droites distinctes peuvent entourer un
domaine. Donc ŕ partir du moment oů l’on a utilisé th4.1 ou th16.1 il faudrait tout
revoir.
Résultat 1 : si deux points A et B sont entre deux pôles d’une droite, il existe une droite et
une seule passant par A et B.
En effet
donc A et B ne peuvent pas ętre un couple de pôles.
Résultat 2 : dans les démonstrations précédentes on a utilisé, en particulier, les théorčmes 4, 16, 17, 18, 21 ou 26. Or tous ces théorčmes dépendent de P6 et du fait que l’on peut doubler la longueur d’une droite (th16.1). Or on vient de démontrer que si deux points sont distants de il passe une infinité de droites.
Cependant les quadrilatčres de Saccheri sur lesquels nous avons travaillé ne sont pas touchés
par cette situation.
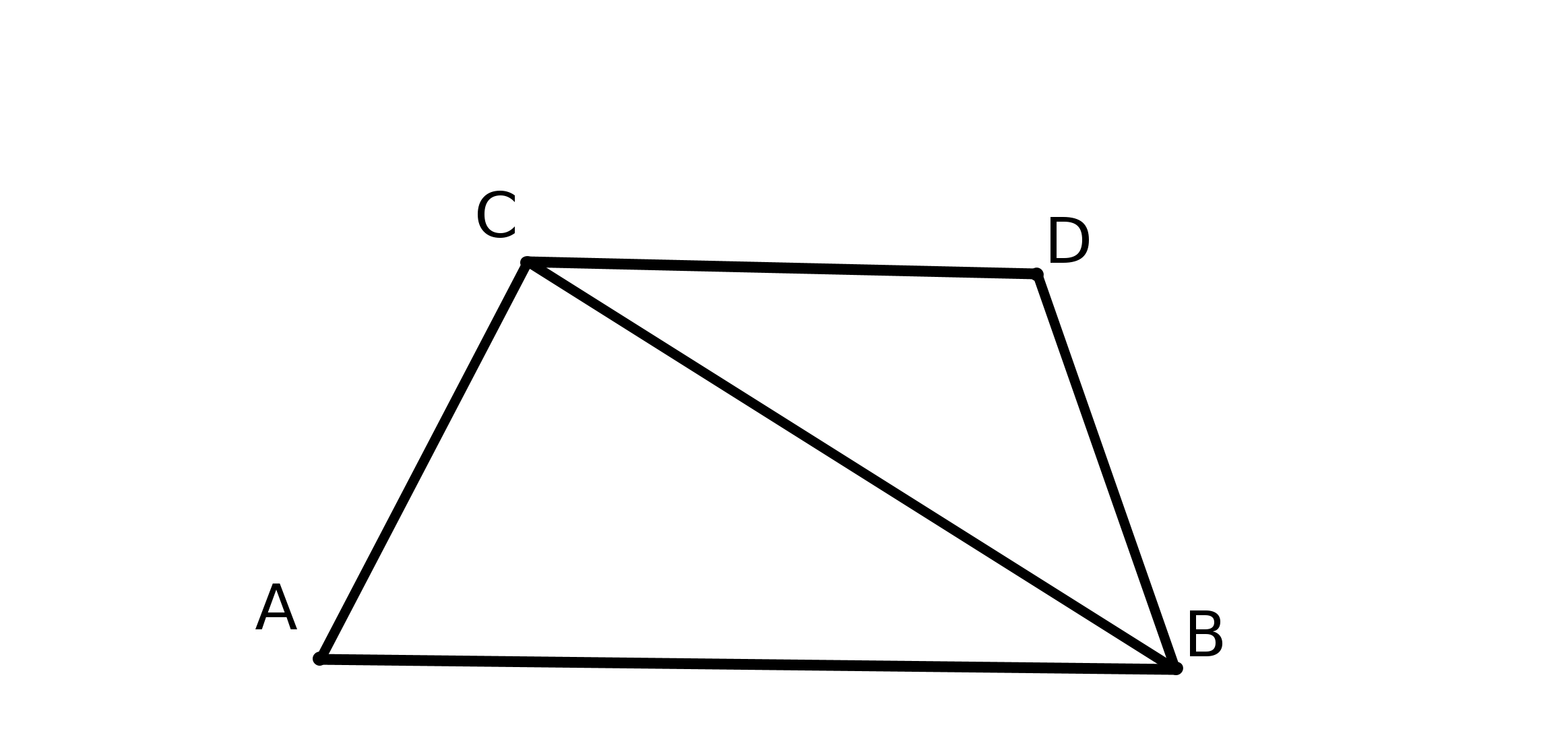
Soit un quadrilatčre de Saccheri ABDC.
Par définition : AB est la perpendiculaire commune ŕ AC et BD, et on a
.
Proposition 1 : A et B ne peuvent pas ętre deux pôles.
Démonstration :
Alors les droites BC et BD passant par B, passent aussi par A. Donc A, C et B, ainsi que A, B et D, sont alignés.
A, B et C, sont alignés, AB est perpendiculaire ŕ AC donc AB est perpendiculaire ŕ BC.
Donc BC et BD sont confondues puisqu’elles sont perpendiculaires ŕ la męme droite. Donc
ABDC n’est plus un quadrilatčre de Saccheri.
Conclusion : dans un quadrilatčre de Saccheri A et B ne peuvent ętre deux pôles.
Proposition 2 : on a .
Démonstration :
Les droites CA, CB et CD sont sécantes en C donc elles sont sécantes en un point C’. B est sur CC’ donc . De plus . Ainsi on pourra doubler la longueur d’une droite et on pourra appliquer les théorčmes d’Euclide n’utilisant pas P5 et le parallélisme.
Conclusion : les résultats démontrés sous H2 sont validés.
CONCLUSION du sous-chapitre 7.4 : l’hypothčse H2 peut ne pas ętre rejetée : il ne faut plus parler de parallélisme et rejeter P6. Mais dans le domaine défini par l’ensemble des droites passant par deux pôles déterminés, les théorčmes 1 ŕ 26, excepté th17.1, sont applicables. On peut construire une nouvelle géométrie qui s’apparente ŕ la géométrie de Riémann.
Reprenons la figure de la proposition 7.6.
Saccheri démontre que les droites AC et BD ne se coupent pas toujours et qu’il existe des droites qui se rapprochent indéfiniment sans se couper. Il s’agit de droites parallčles non euclidiennes. Saccheri n’arrive pas ŕ de contradiction mais conclut : "L’hypothčse de l’aigu est absolument fausse, car elle répugne ŕ la nature de la ligne droite."
Un commentateur a dit que Saccheri avait trouvé un diamant et qu’il l’avait jeté en déclarant
que c’était un morceau de verre !
Lambert prend la géométrie neutre comme point de départ.
Il utilise un quadrilatčre qui a trois angles droits. Il fait alors trois hypothčses :
H1 : le quatričme angle est droit.
H2 : le quatričme angle est obtus.
H3 : le quatričme angle est aigu.
Sous H1 il démontre P5.
Il écarte H2 en supposant qu’une droite est infinie et nous avons vu que c’était faux. Il fait donc
la męme erreur que Saccheri.
Nous nous intéresserons ŕ H3.
Soit un trirectangle ABDC dans lequel on suppose que les angles A, B et C sont droits et que
l’angle D est aigu.
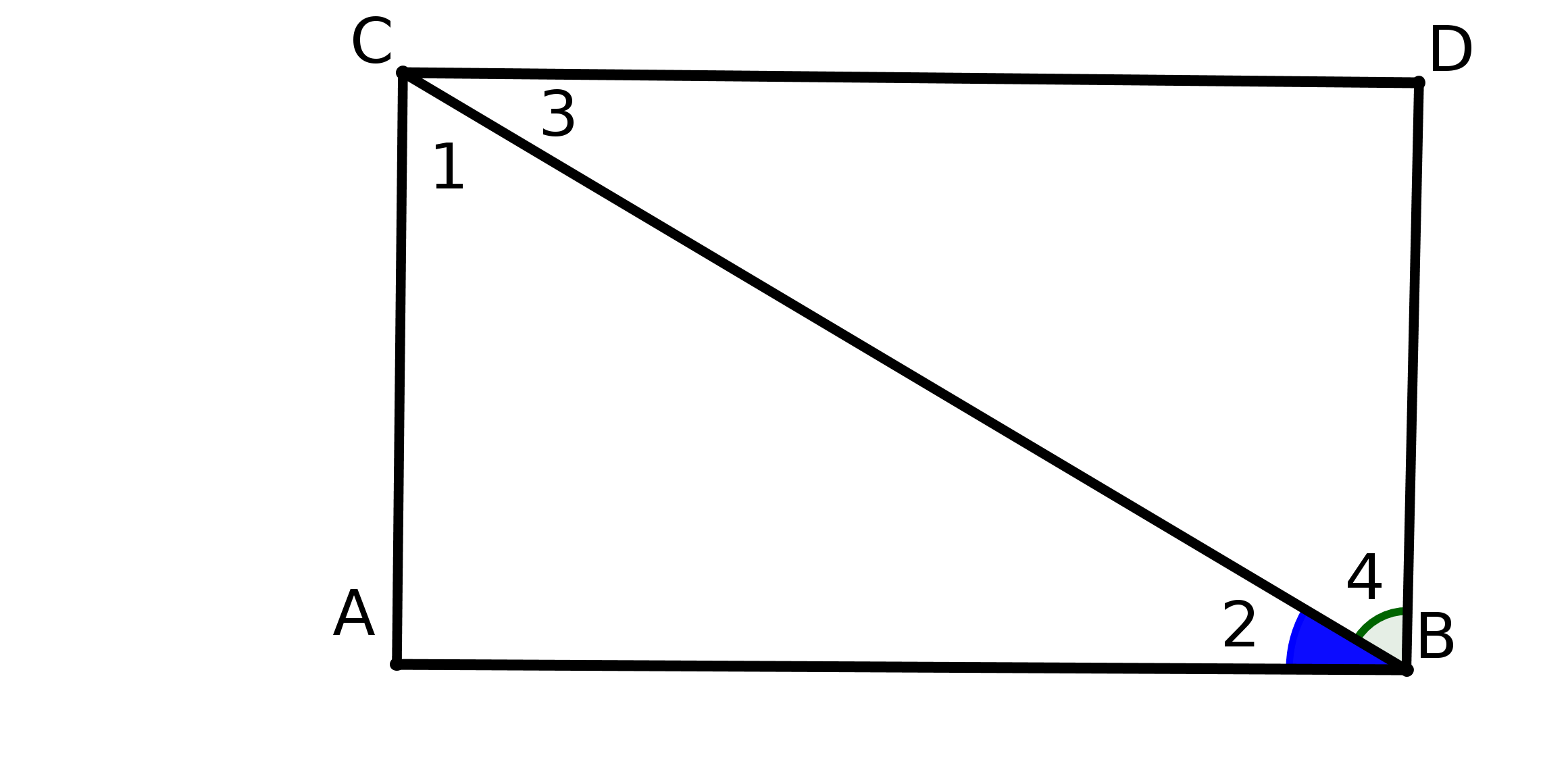
Soient les angles 1, 2, 3 et 4.
Si 1 droit alors 1 droit. Comme droit on obtient : .
De męme .
Tracons E tel que (th2.1), (th23.1).
donc CE coupe l’angle ACB.
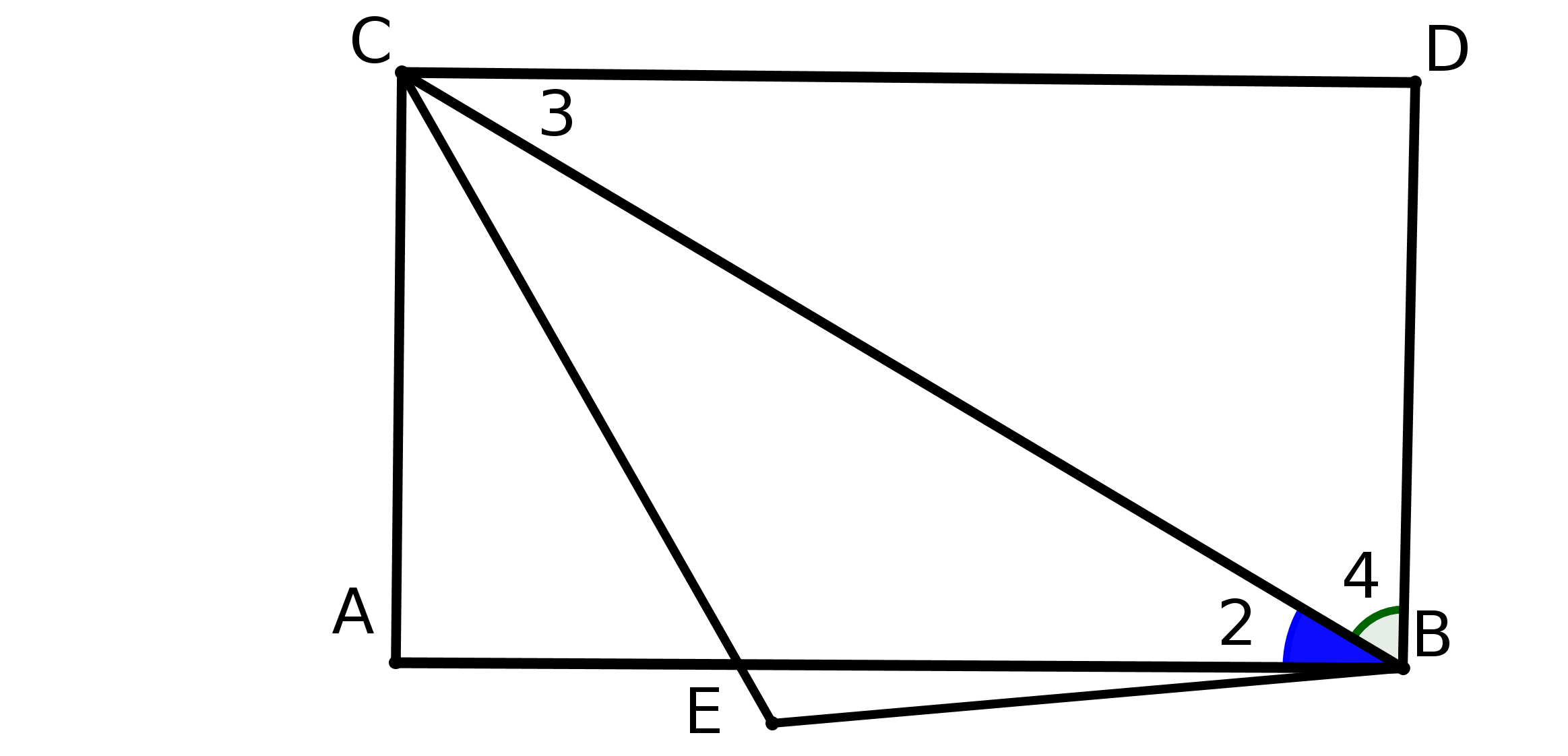
On a : , et donc (th4.1) les triangles BCE et BCD sont égaux donc, en particulier :
et . Mais donc la droite BE est dans l’angle CBA donc E est ŕ l’intérieur du triangle ABC ou sur AB donc, th 21.1, droit, donc droit. Contradiction avec notre hypothčse droit.
Donc
droit donc la somme des angles d’un triangle rectangle est plus petite que deux droits.
On démontrerait, de męme, que la somme des angles d’un triangle quelconque est inférieure ŕ
deux droits. Il suffit de se ramener ŕ deux triangles rectangles.
Proposition 8.1 : la somme des angles d’un quadrilatčre est inférieure ŕ quatre
droits.
Démonstration : Un quadrilatčre est la réunion de deux triangles, d’oů le résultat.
Proposition 8.2 : il n’y a pas de triangles semblables, autres qu’égaux, sous H3.
Démonstration : Supposons qu’il existe deux triangles semblables ABC et DEF tels que
,
et
. On
suppose
.
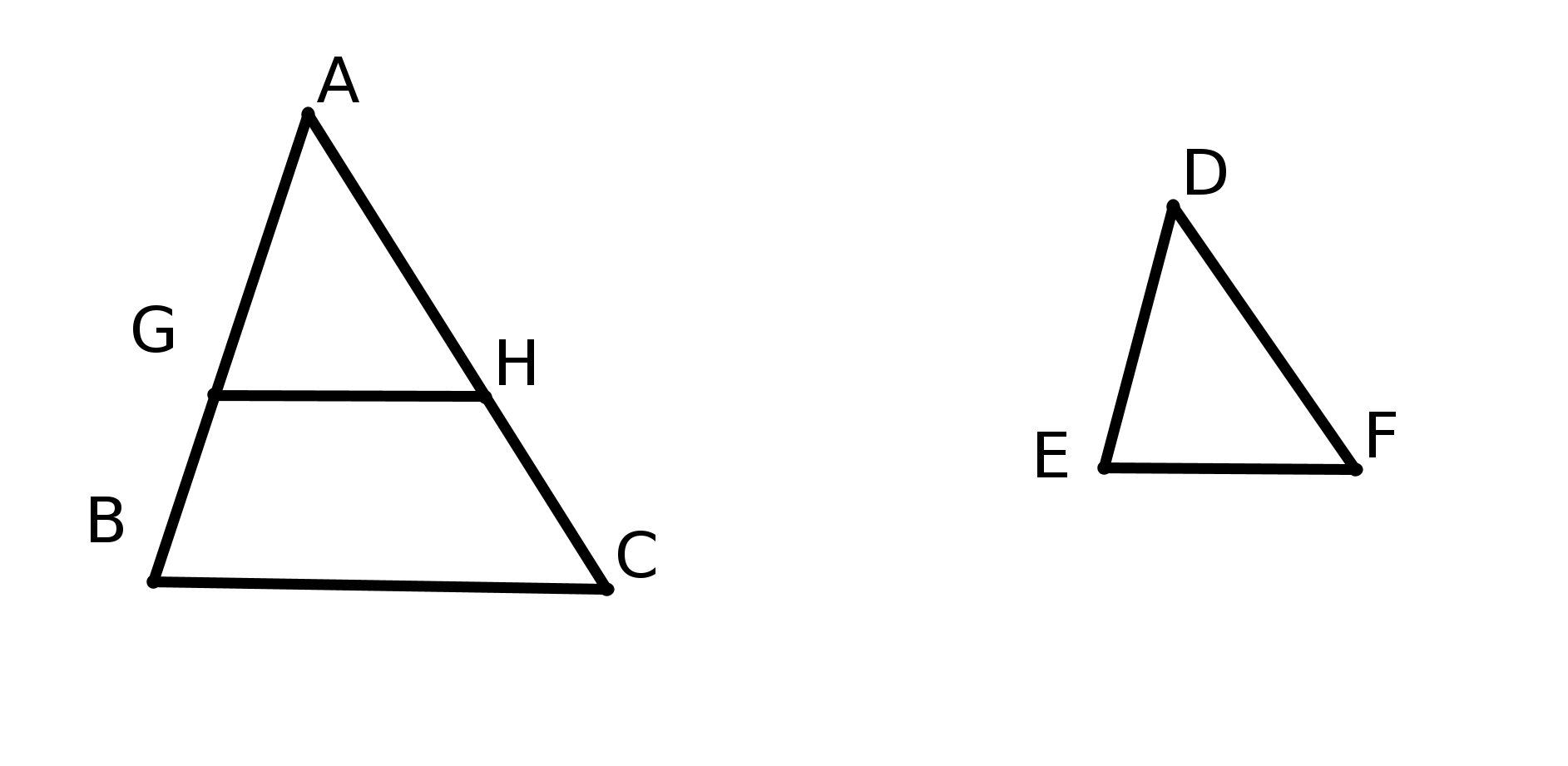
1. On reporte DE sur AC (th 2.1). on obtient AG=DE.
2. A partir de G on trace GI tel que (th 23.1). Puisque GI est parallčle ŕ BC (th 28.1). Donc GI ne coupe pas BC et coupe AC en H.
3. Le théorčme 26.1 implique que les triangles AGH et DEF sont égaux (deux angles égaux et un côté égal).
4. On pose droit. Dans le quadrilatčre GHBC la somme des angles est :
donc
donc
, ce qui est impossible. Donc on a .
donc il n’existe pas de triangles semblables inégaux.
Les propositions suivantes montrent ont pour but de montrer que plus un quadrilatčre a une aire
importante et plus la somme de ses angles est petite. Ainsi la somme de ses angles dépend de son
aire.
Proposition 8.3 : Soit un quadrilatčre de Lambert ABDC oů D est l’angle aigu. Alors
et
.
Démonstration : on a :
On pose 1 droit.
donc .
Or . Donc . .
De męme .
Proposition 8.4 : Soit un quadrilatčre de Lambert ABDC oů D est l’angle aigu. Alors
et
.
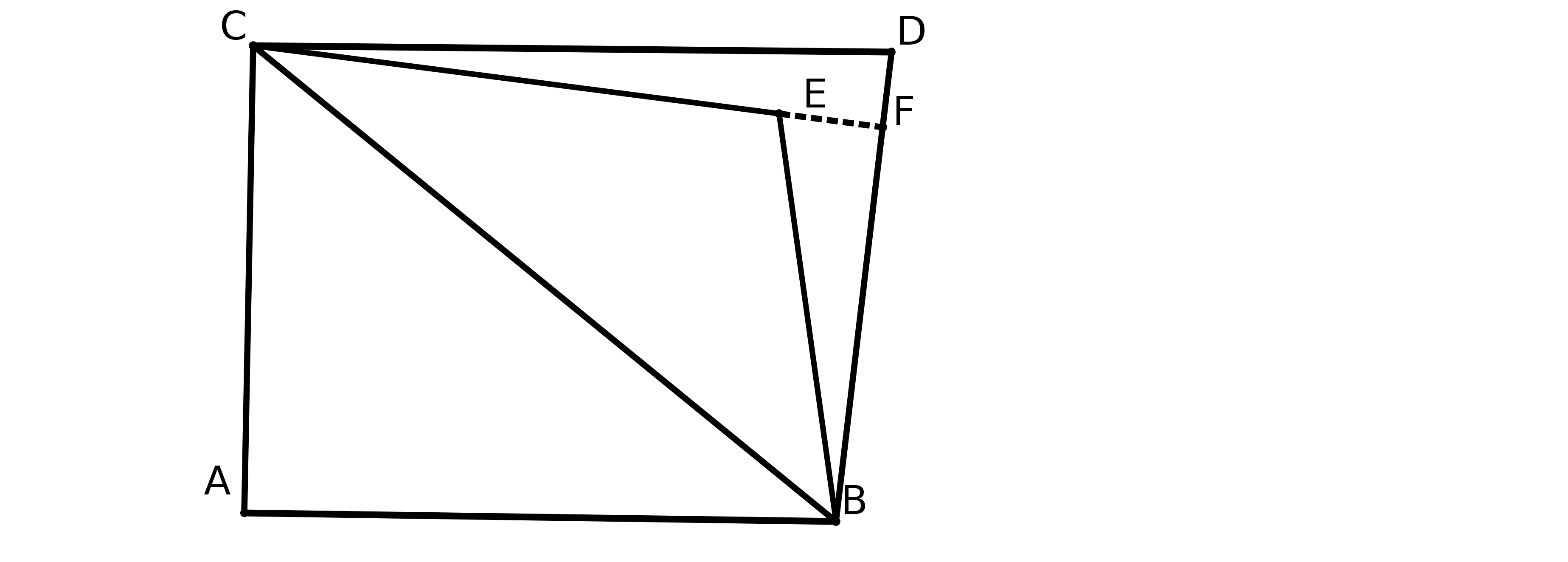
Construisons le triangle CBE égal au triangle CAB (th 22.1) oů , . Alors on a :
, et droit.
Comme et , E est ŕ l’intérieur du triangle CBD.
Soit F l’interchapter de CE et BD. Alors (th 16.1) donc est aigu donc (th 18.1) donc .
est
aigu donc est
obtus. Donc
donc .
Proposition 8.5 : Soit un quadrilatčre de Lambert ABFE oů F est l’angle aigu. Soit D un point de BF. Soit DC la perpendiculaire ŕ AC.
Alors ,
et . De
plus .
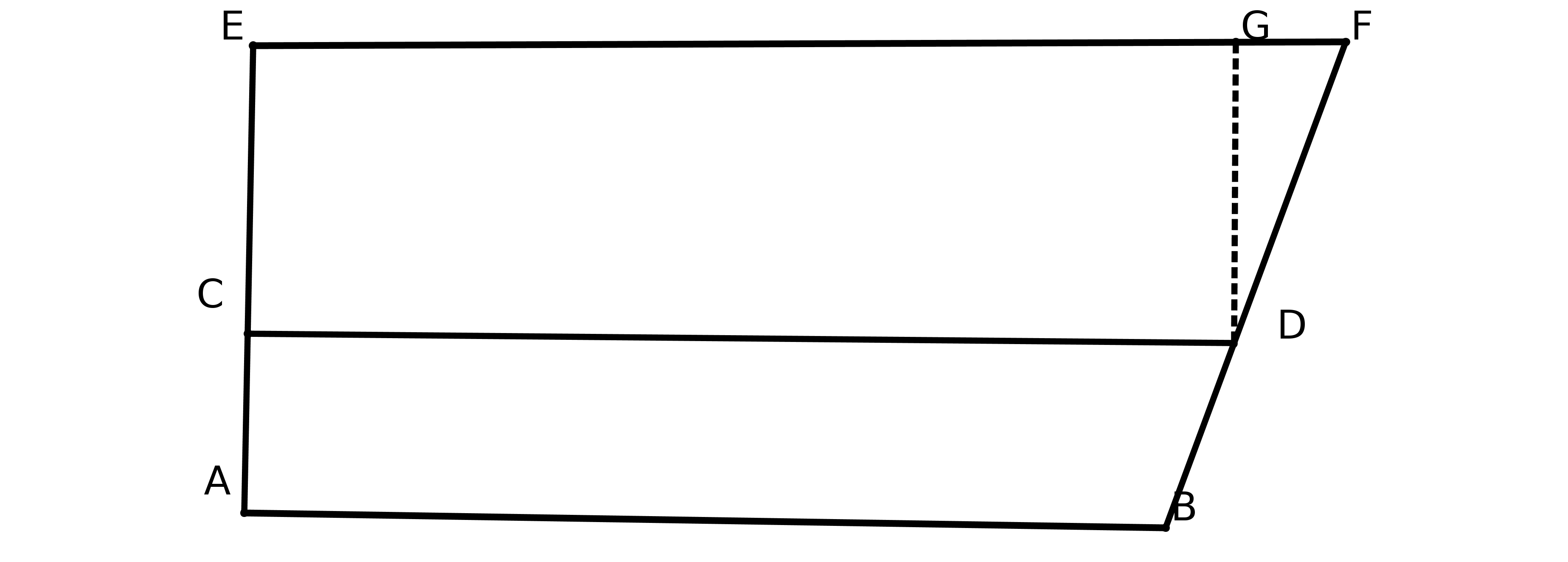
Démonstration : Les angles C, A et B sont droits donc ABDC est un quadrilatčre de Lambert donc D est aigu. Donc est obtus. Donc, si on appelle DG’ la perpendiculaire ŕ CD, DG’ est intérieure ŕ .
On a donc . Donc DG’ est dans l’angle . Donc DG’ coupe EF entre E et F. Appelons G ce point d’interchapter.
Alors ECDG est quadrilatčre de Lambert oů G est l’angle aigu. Donc (P.8.4) donc .
De męme . Comme est obtus et aigu, on a (th 18.1)donc .
On a . Donc
. Donc
.
Donc .
CQFD.
Proposition 8.6 : soit un quadrilatčre de Lambert ABFE oů E est aigu. Soient D et G deux points, respectivement, sur BF et EF et DC, GH, respectivement les perpendiculaires ŕ EA et AB.
Alors .

Démonstration : ABDC et ABFE sont deux quadrilatčres de Lambert donc d’aprčs la proposition précédente .
ABDC et AHIC sont deux quadrilatčres de Lambert donc d’aprčs la proposition précédente .
Donc .
Conclusion : la somme des angles dans un quadrilatčre dépend de son aire et Lambert en déduira que la somme des angles d’un triangle dépend de son aire.
Voici une démonstration que propose Legendre pour établir que la somme des angles dans un
triangle est égale ŕ deux droits sans utiliser P5.
On construit un triangle ABC tel que .
Cette construction est possible(th 22.1) en prenant
.
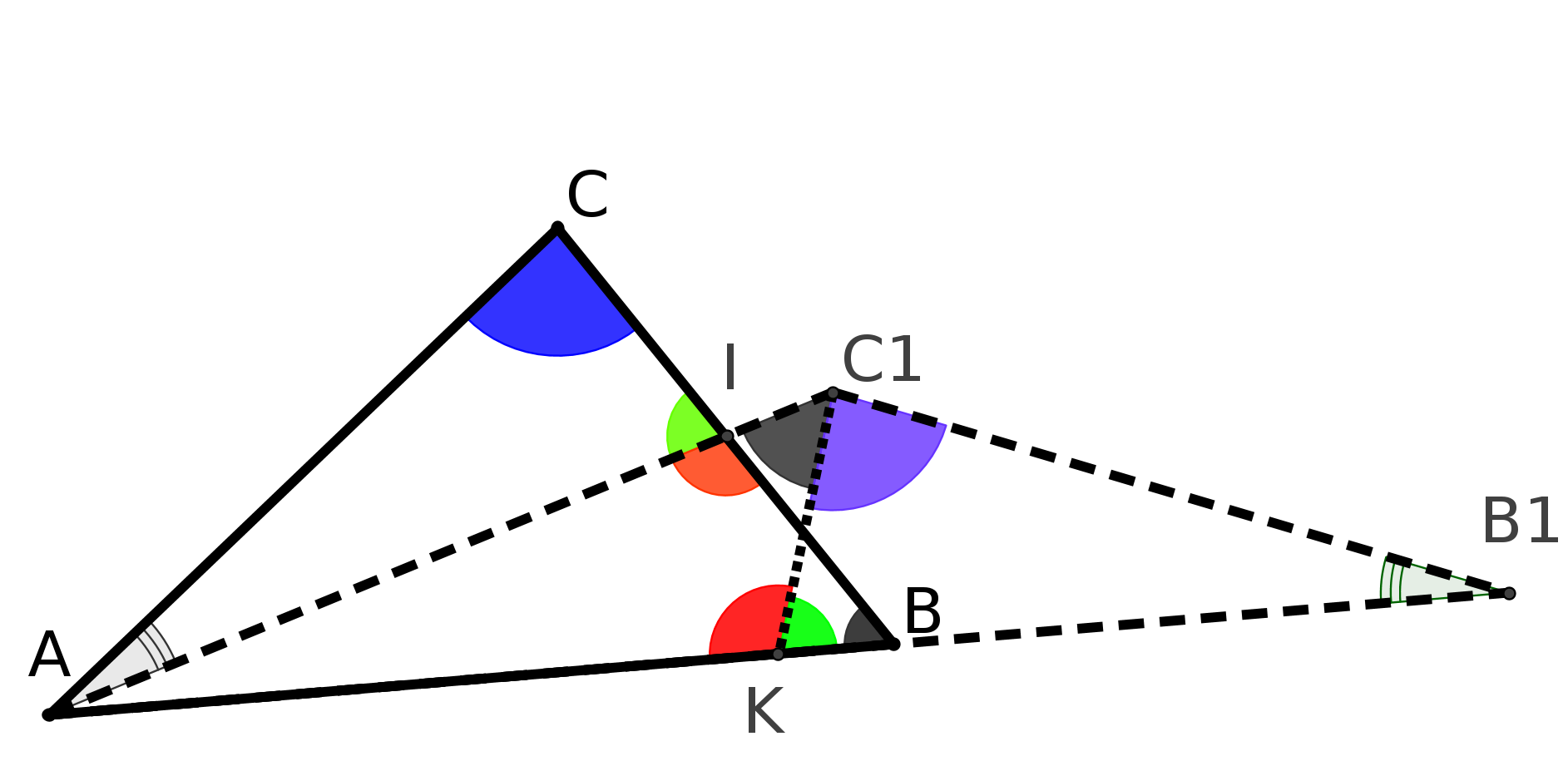
Soit I le milieu de BC. On a :
donc (Th18.1) et d’aprčs le th 21.1 donc donc .
On appelle le point tel que et A, I et alignés. donc I est sur .
On prolonge AB et on appelle
le point tel que . On appelle
K le point de AB tel que .
1. Les triangles et sont égaux (th4.1). En effet ils ont un angle égal et deux côtés égaux. Donc on a :
, et .
2. Démontrons que .
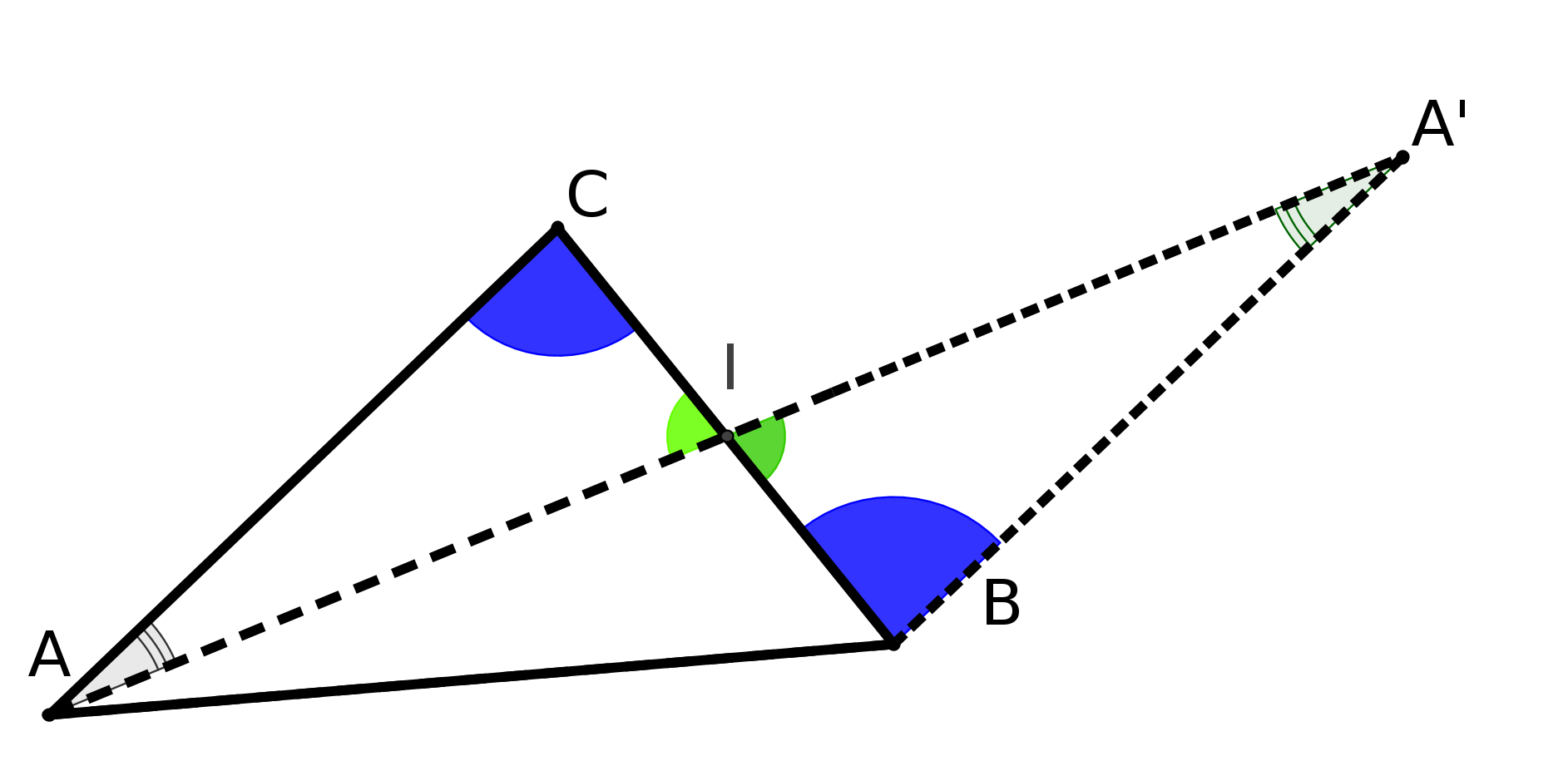
On prolonge AI et on prend le point A’ tel que IA’=IA. Alors les deux triangles ACI et IA’B sont égaux (th4.1). Donc, en particulier, on a et .
On a donc (th 18.1).
On a et donc .
On a et donc .
On a donc
(th 18). Donc
. En particulier, on en
déduit que B est sur .
3. Les triangles et sont égaux. En effet ils ont un angle égal et deux côtés égaux. Donc on a :
,
et
.
4. Appelons a, b et c les angles du triangle ABC et , et les angles de . On a :
. donc .
On a :
donc .
5. On répčte cette opération fois. On obtient ainsi une suite de triangles . Appelons , et les angles de . Alors, on démontre facilement que,
pour tout ,
et
.
6. On applique plusieurs fois le théorčme 18. On a ,
et
donc
donc
donc
. Mais
. Donc
.
7. On démontre par récurrence que, pour tout
,
.
8. En conclusion, on a construit une suite de
triangles
tels
que ,
,
et
.
9. Donc, de, pour tout , et , on tire : . Ainsi :
==0
et donc .
10. Legendre nous dit alors :
"Mais on peut concevoir que le triangle
varie dans ses angles et ses côtés, de maničre ŕ représenter les triangles successifs qui naissent
ultérieurement de la męme construction et s’approchent de plus en plus de la limite oů les angles
et
seraient nuls. Dans cette
limite les points A, et
finissent par ętre exactement
en ligne droite" ; alors a
pour limite 2 droits. Donc
droits. Donc la somme des angles d’un triangle est égale ŕ deux droits donc on peut en déduire
P5 !
11. Remarquons que, pour tout ,
le triangle a la męme aire que ABC.
En effet, les triangles IAC et , d’une part, et les triangles AIB et , d’autre part, sont égaux donc les triangles ABC et et ABC ont la męme aire. Donc, par récurrence, on obtient le résultat voulu. Donc le triangle ne peut avoir pour limite un triangle dont les sommets sont alignés.
En fait, les points
et n’ont pas de
limite puisque .
Donc, affirmer qu’en ,
les points sont alignés n’a pas de sens. La conclusion de Legendre est donc fausse.
Nous allons construire suivant Lobatchevski une géométrie non euclidienne.
On prend la géométrie neutre ŕ laquelle on rajoute le principe suivant noté P’5 :
P’5 : Soit P un point quelconque et une droite AB quelconque ne passant
par P. Alors il existe deux droites CD et EF distinctes passant par P telles
que :
1. CD et EF ne coupent pas AB męme prolongées de chaque côté indéfiniment.
2. Toute droite passant par P et coupant l’angle coupe AB.
3. Toute droite passant par P et coupant l’angle
ou
EPC ne coupe pas AB męme prolongée indéfiniment.
Remarque : on aurait pu prendre un postulat moins fort. Le troisičme point pourrait se démontrer en utilisant l’énoncé suivant :
Dans un triangle toute droite issue d’un sommet coupe le côté opposé.
Cet énoncé est utilisé dans la démonstration du théorčme 21.1, mais dans Euclide il n’est
jamais formulé. Il faudrait le poser en postulat.
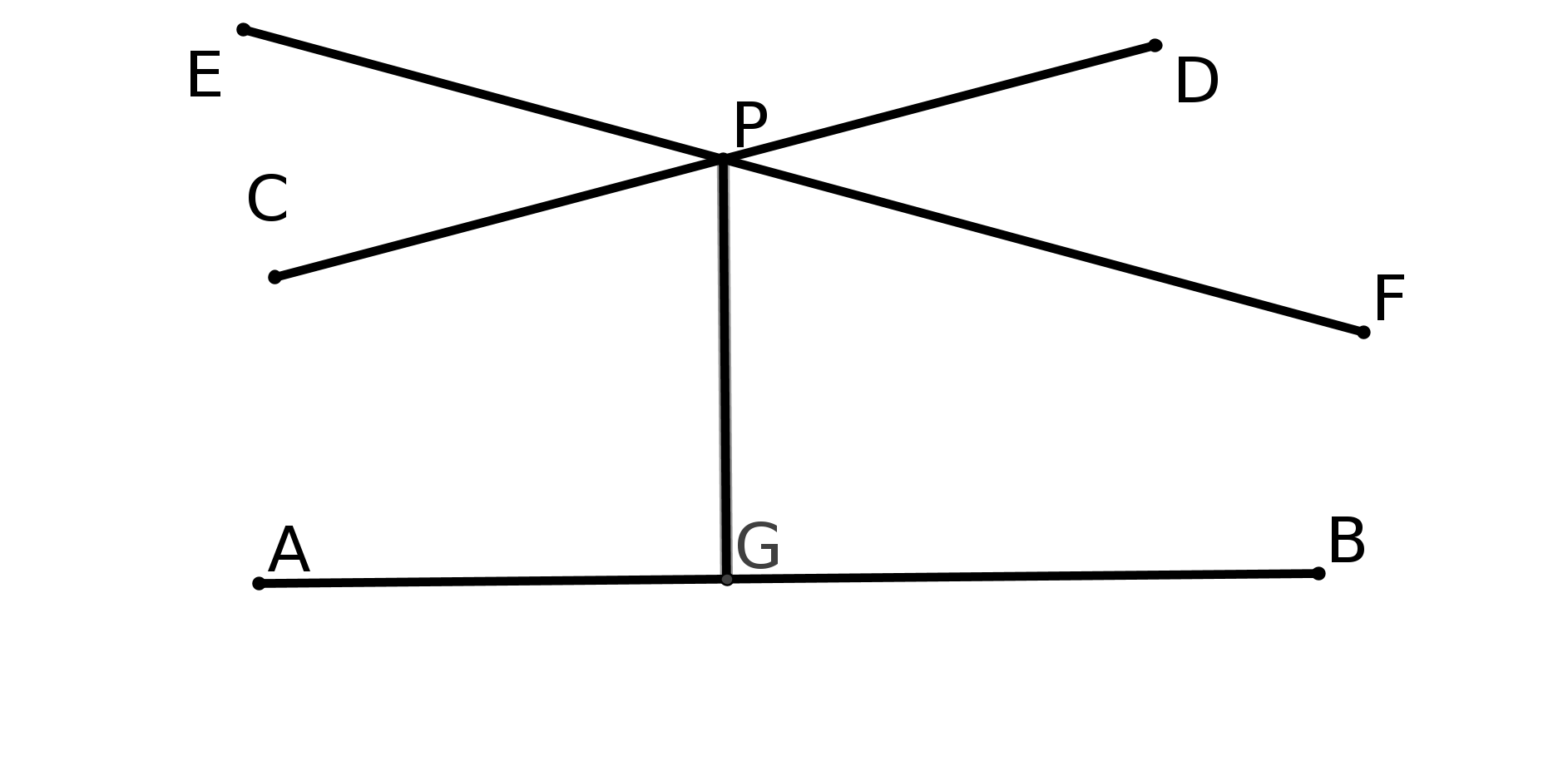
Définition 1.10 : les droites EF et CD sont appelées parallčles hyperboliques par rapport ŕ P
et toute droite passant par P et ne coupant pas AB est appelée parallčle divergente par rapport ŕ
P.
Notation : on notera "parallčle hyperbolique" par "h-parallčle" et "parallčle divergente" par
"d-parallčle".
Proposition 10.1 : en utilisant les notations de P’5, les parallčles hyperboliques font des angles
aigus égaux avec la perpendiculaire PG ŕ AB.
Démonstration :
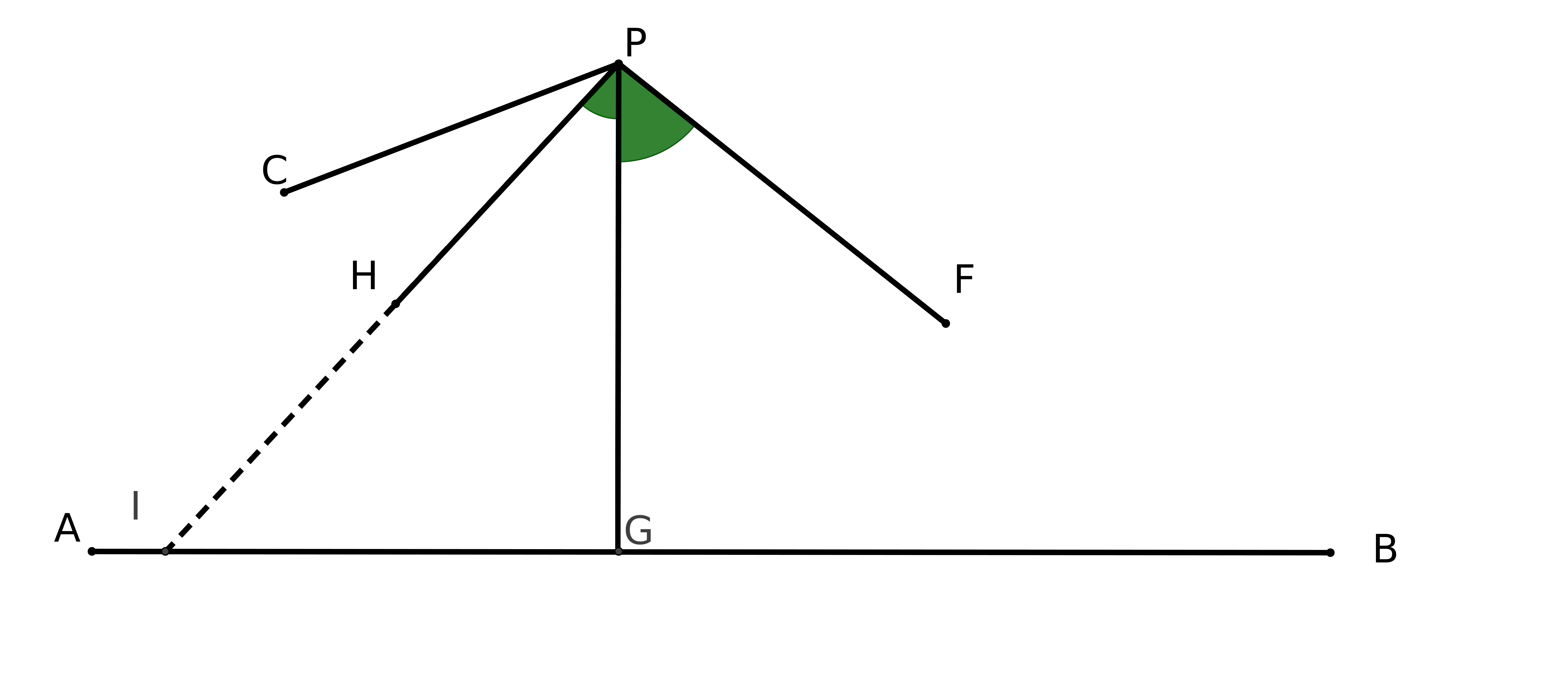
A. Montrons d’abord que .
1. Supposons . Soit H tel que (th23.1).
2. donc PH coupe AB (P’5). Soit I le point d’interchapter.
3. Soit J le point tel que .
On trace PJ.
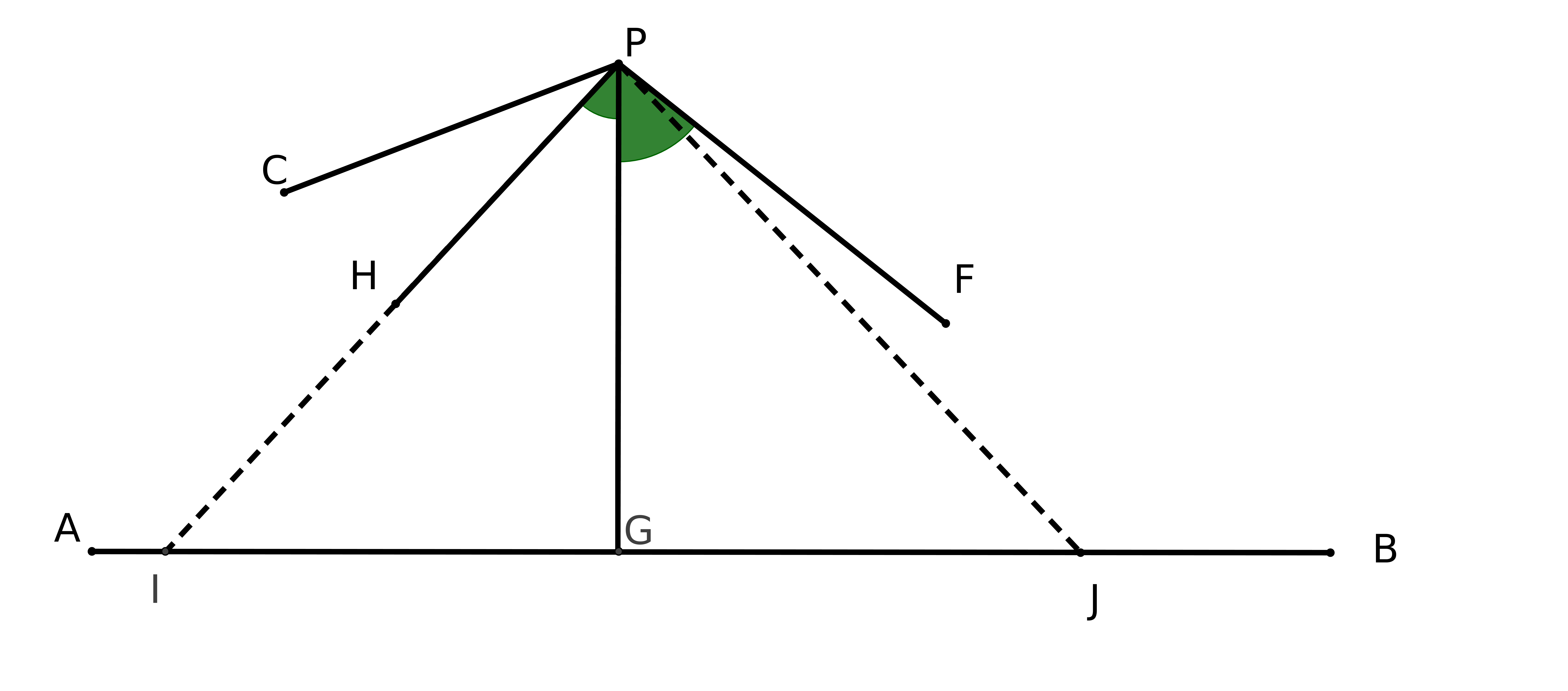
4. Donc les triangles IPG et JPG sont égaux (th 4.1). Donc .
5. Donc .
6. Mais PJ coupe AB donc PJ coupe (P’5). Donc . Contradiction : donc est faux.
7. On démontrerait, de męme, que
est faux. Donc .
B. Montrons que les angles et sont aigus
a. Supposons qu’ils sont droits.
Alors (th14.1) C, P, F sont alignés donc EF et CD sont confondues. Contradiction avec P’5. Donc et ne sont pas droits.
b. Supposons qu’ils sont obtus.
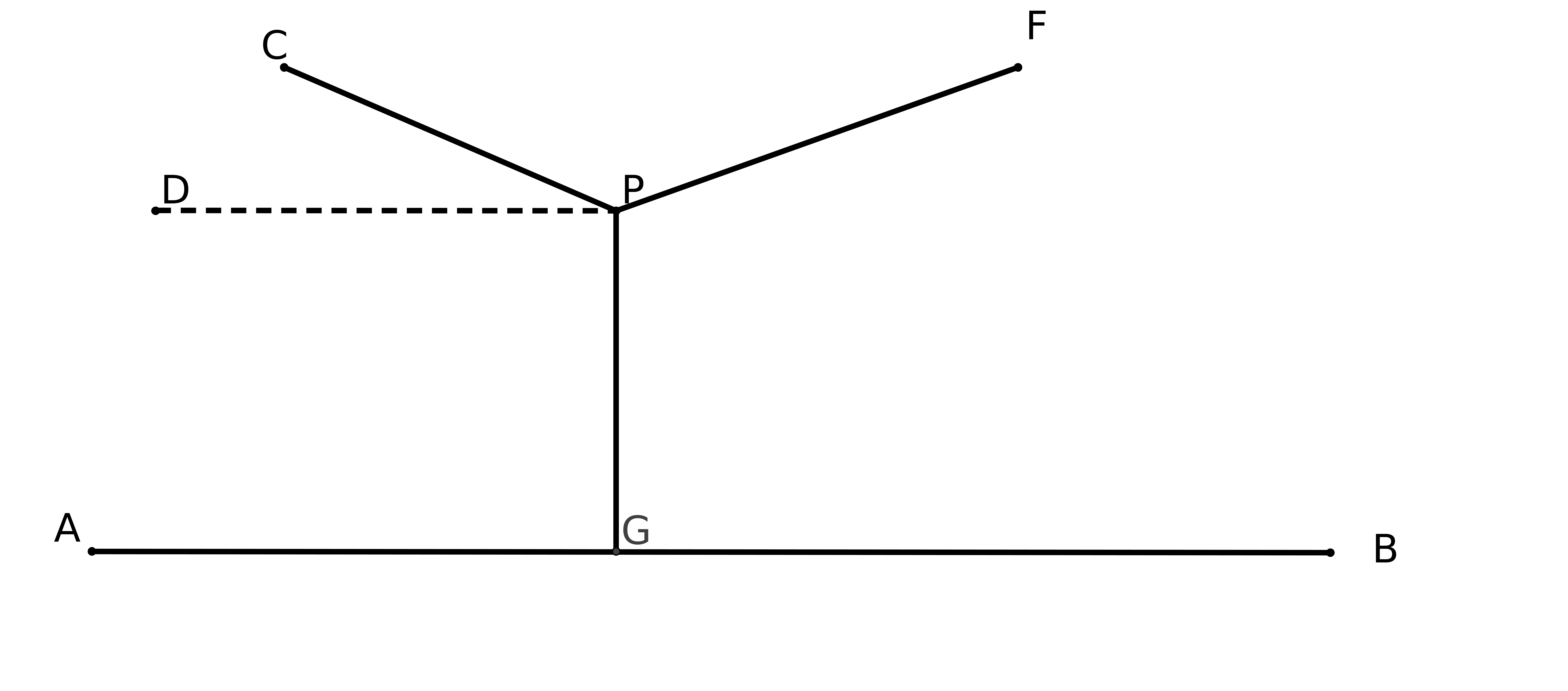
Soit la droite PD perpendiculaire ŕ PG, C et D étant du męme côté de PG. Alors donc (P’5) PD coupe AB. Mais PD et AB sont parallčles d’aprčs le théorčme 27.1 : contradiction.
Conclusion : les angles
et sont
aigus.
Définition 2.10 : soient P un point, AB une droite et CD et EF les parallčles hyperboliques
passant par P ŕ AB. EF sera appelée parallčle hyperbolique ŕ "droite" et CD ŕ
"gauche". Nous dirons qu’une h-parallčle a une direction.
Proposition 10.2 : une parallčle hyperbolique ŕ une droite donnée conserve son
caractčre de parallélisme en chacun de ses points. Cela signifie que si une droite CD
est une h-parallčle ŕ une droite AB par rapport ŕ un de ses points P, elle l’est
encore ŕ par rapport ŕ n’importe quel autre de ses points R, dans la męme
direction.
Démonstration : on suppose que CD est une h-parallčle ŕ droite.
A. On prend un point R sur PD.
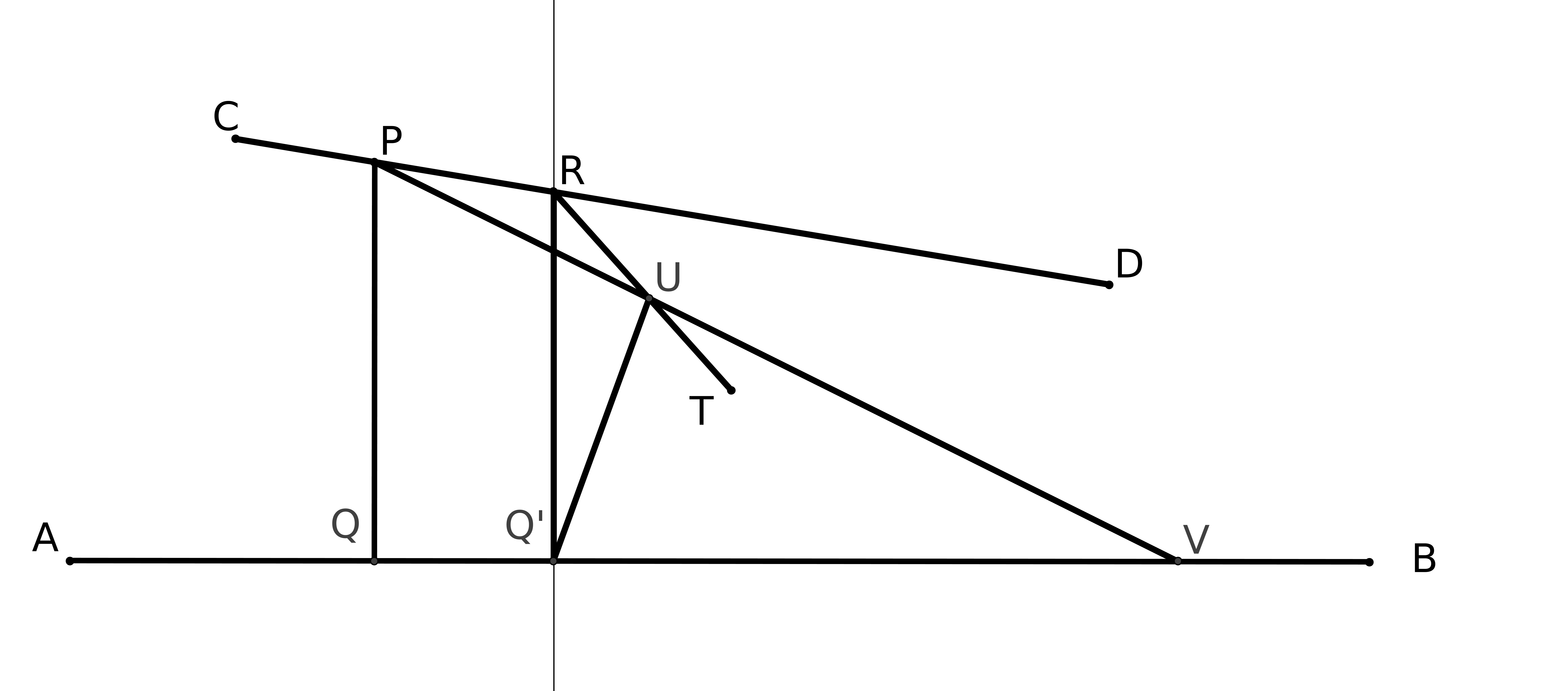
1. On trace les perpendiculaires ŕ AB, PQ et RQ’ (th12.1).
2. On trace une droite RT qui coupe l’angle . Soit U un point de RT et on joint UQ’.
3. PU coupe AB (P’5) en un point V.
4. Par construction, RT est distincte de UQ’ et de PV. De pus T est ŕ l’intérieur du triangle VUQ’. Donc RT coupe l’angle .
5. Ne coupant ni UQ’, ni UV en un autre point que U, RT coupe Q’V donc AB. Donc CD est une
h-parallčle pour R.
B. Prenons R sur PC.
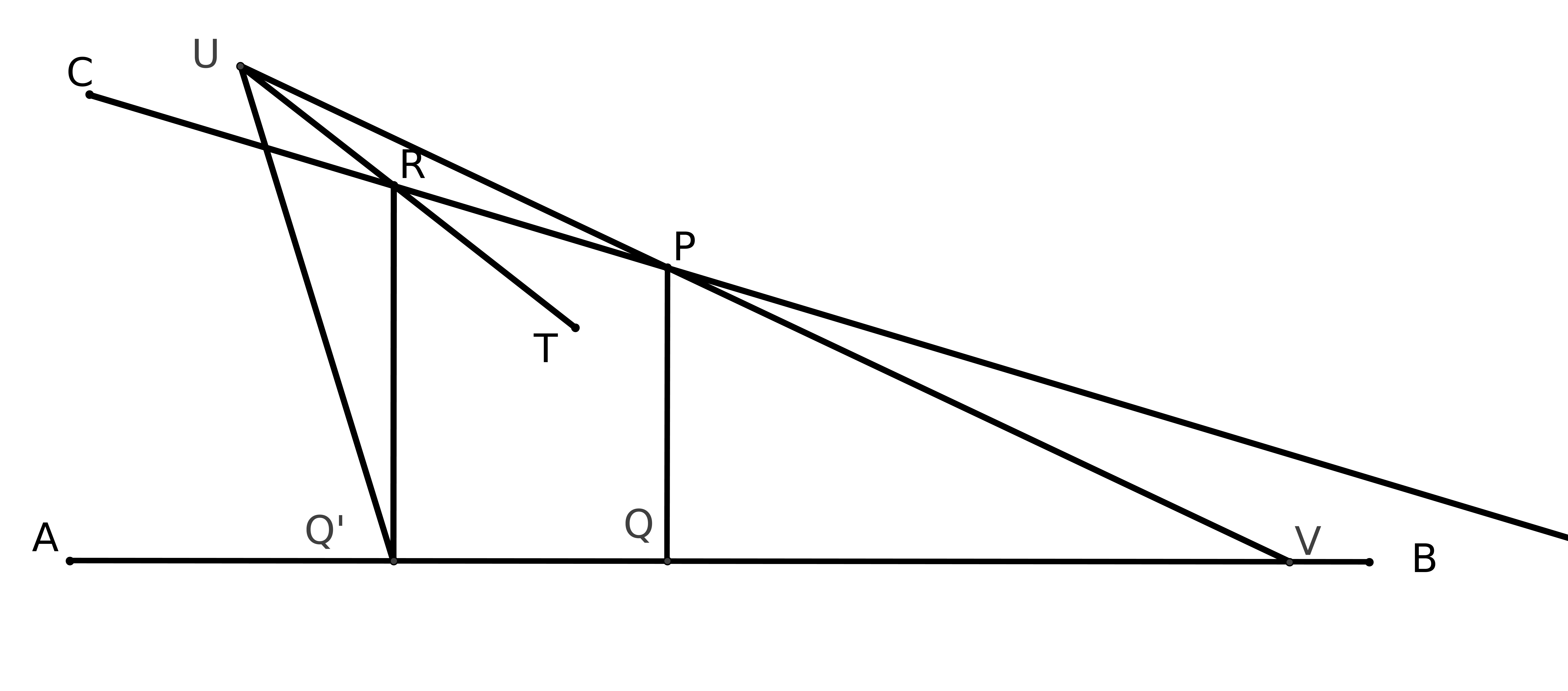
La démonstration est la męme que précédemment sauf que l’on
prendra U sur le prolongement de TR de maničre que PU coupe l’angle
donc
AB.
Proposition 10.3 : si une droite est une parallčle divergente en un point elle l’est encore en
chacun de ses points.
Démonstration : Soit CD une d-parallčle ŕ une droite AB en un point P. Soit un autre point I
de CD. CD est une droite qui ne coupe pas AB. Elle est donc soit une h-parallčle soit une
d-parallčle en I. Ce n’est pas une h-parallčle en I, sinon elle le serait en P. Donc c’est une
d-parallčle en I.
Proposition 10.4 : deux droites sont réciproquement parallčles. Cela signifie : si CD est une
parallčle ŕ AB, la droite AB est parallčle ŕ CD.
Démonstration :
A. Soit CD est une h-parallčle ŕ AB ŕ droite.
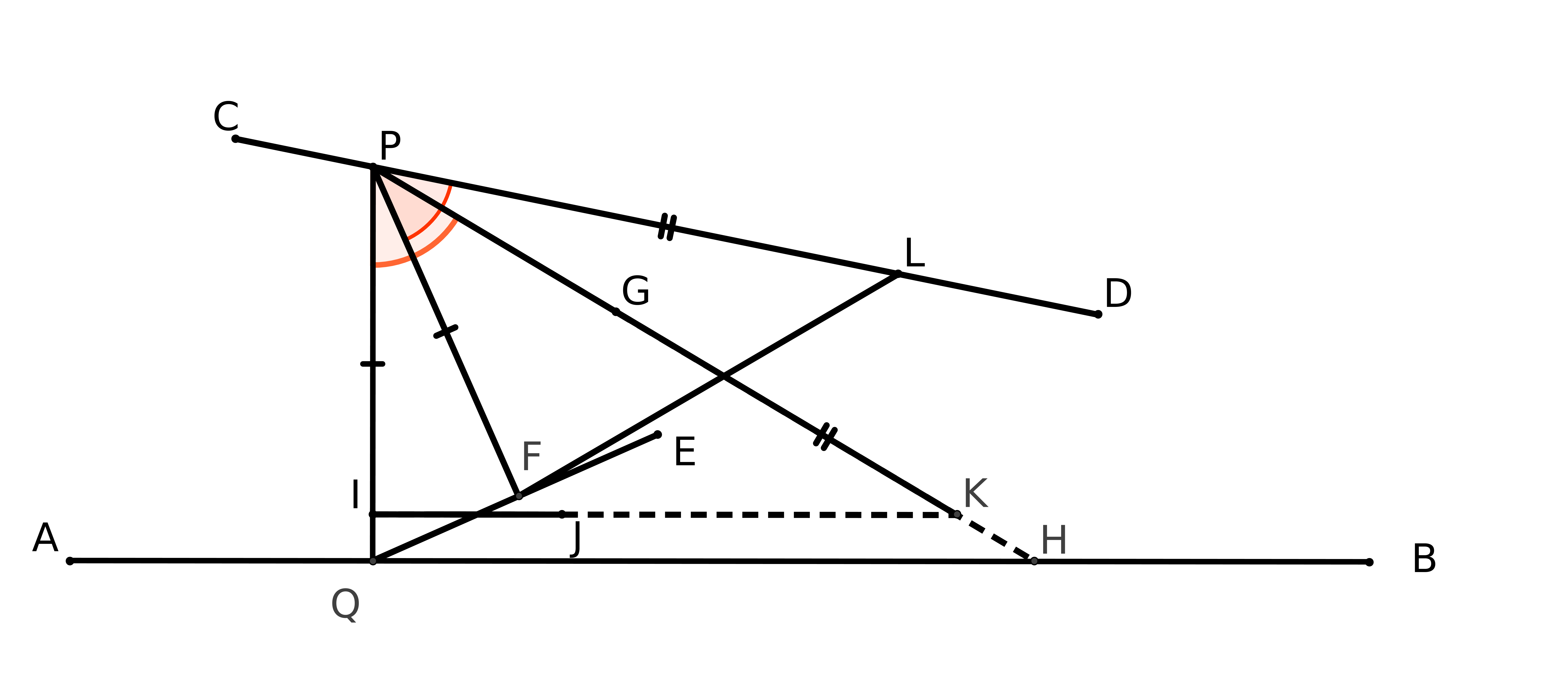
1. Soit et soit la droite QE coupant . Montrons que QE coupe CD.
2. Soit . Alors F est du męme côté de CD que Q et E (sinon QE coupe CD et c’est terminé).
3. On a (th 18.1).
4. On a (cf 2.)
5. Soit G tel que . D’aprčs 4. PG coupe donc PG coupe AB en un point H puisque CD est une h-parallčle.
6. Soit I tel que et soit IJ la perpendiculaire ŕ PQ. IJ parallčle ŕ AB (th 27.1) donc ne coupe pas AB. IJ peut ętre prolongée continűment en une droite dont l’extrémité J’ est ŕ l’extérieur du triangle PHQ. IJ coupe donc PH en un point K.
7. Soit L un point de PD tel que PL=PK. Alors les triangles PLF et PKI sont égaux. Donc droit.
8. Donc ,
donc Q, F, E et L sont alignés, donc QE coupe CD donc AB est une h-parallčle ŕ CD ŕ
droite.
Soit CD une d-parallčle ŕ AB.
1. Alors AB et CD ne se coupent pas.
2. Si AB était une h-parallčle ŕ CD, CD le serait aussi d’aprčs A. Donc AB est une
d-parallčle ŕ CD.
Corollaire : Deux droites h-parallčles ne peuvent pas admettre de perpendiculaire
commune.
Démonstration : en effet, la perpendiculaire d’une h-parallčle ŕ une droite fait un angle aigu
avec la h-parallčle. Et le h-parallélisme est réciproque.
Démontrons le lemme suivant qui est vrai dans la géométrie neutre.
lemme 10.1 : dans un quadrilatčre ABDC oů les angles A et B sont droits on a :
1. Si AC=BD alors .
2. Si alors .
3. Si
alors .
Démonstration :
CAS1 : .
La démonstration est celle du théorčme 7.1.
CAS1 : .
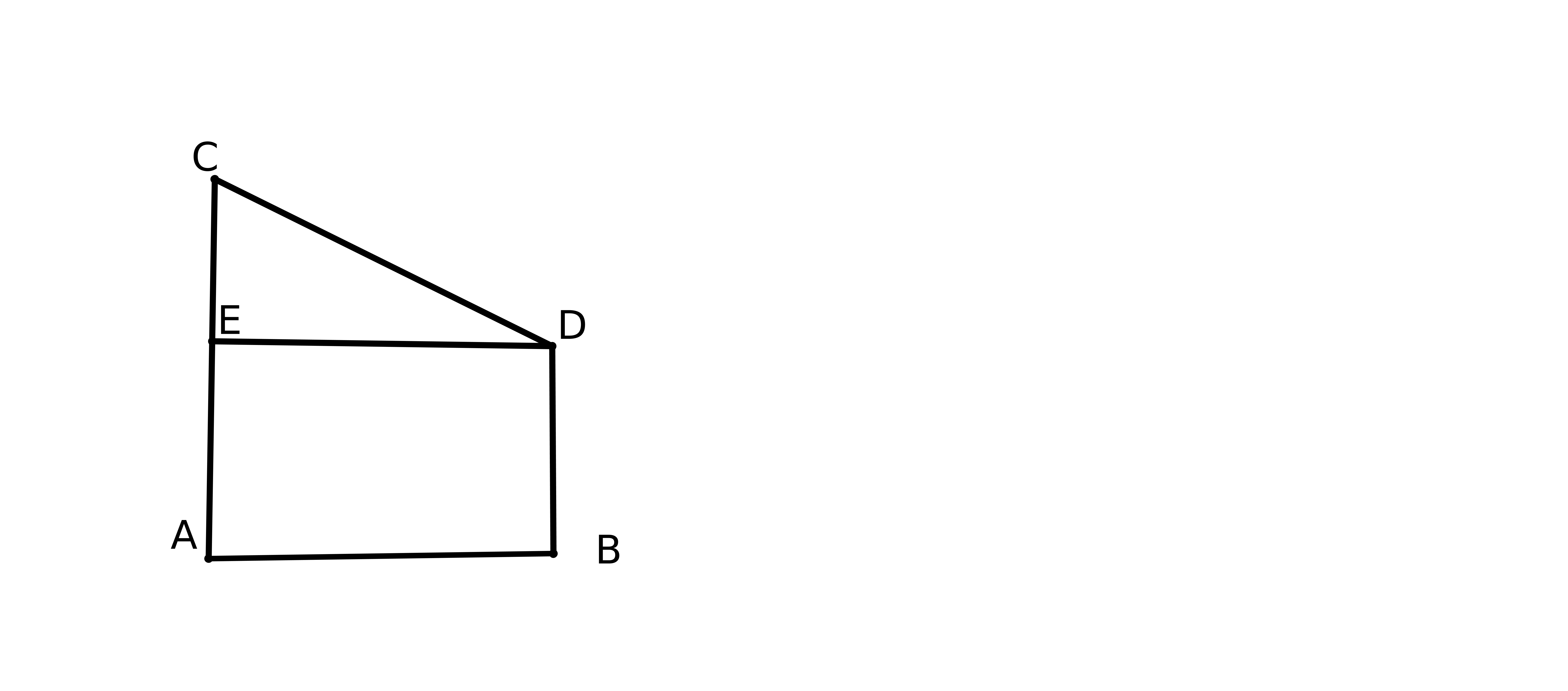
1. Prenons le point E de AC tel que . Alors, d’aprčs le cas 1, on a : .
2. Mais (th 16.1) et .
3. Donc .
CAS1 : .
Il suffit d’inverser les rôles de AC et BD dans le cas 2.
Proposition 10.5 : Deux droites h-parallčles ŕ une męme troisičme droite, dans la męme
direction, sont h-parallčles entre elles.
Démonstration :
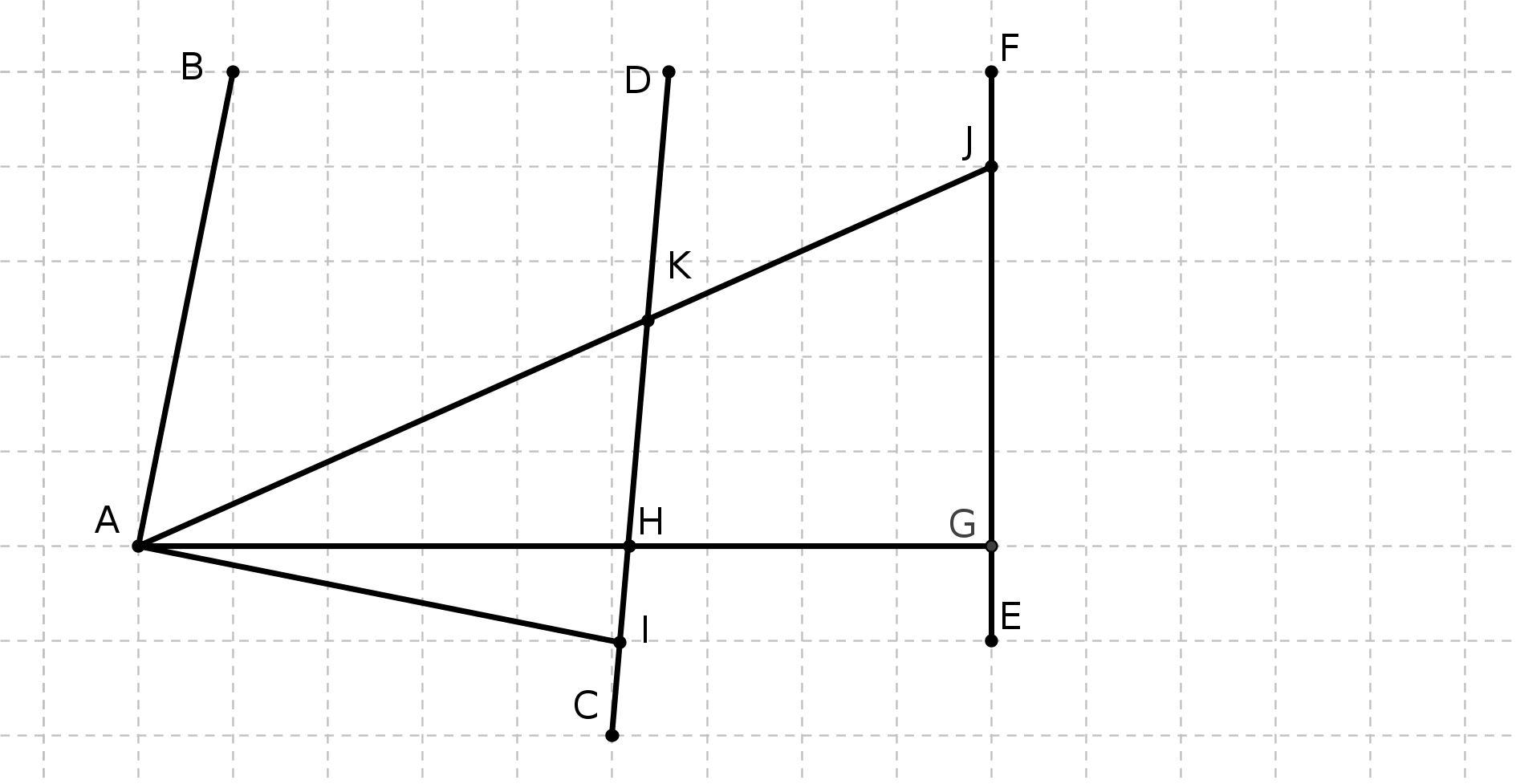
1. Soient AB et CD deux droites h-parallčles ŕ EF de maničre que A et E sont de part et d’autre de CD.
Soit AG la perpendiculaire ŕ EF. A et G sont de part et d’autre de CD, donc AG coupe CD en un point H.
Soit AI la perpendiculaire ŕ CD. CD h-parallčle ŕ EF donc l’angle est aigu, donc l’angle aussi. Donc H est sur DI.
Soit une droite quelconque issue de A et coupant l’angle . AB est h-parallčle ŕ EF donc cette droite coupe EF en un point J. HD ne coupe pas EF donc coupe AJ en un point K. Donc toute droite coupant l’angle coupe CD. Si AB coupait CD en un point L, CD étant h-parallčle ŕ EF en chacun de ses points, AL, donc AB, couperait EF : impossible.
Ainsi AB est h-parallčle ŕ CD.
2. Soient AB et EF deux droites h-parallčles ŕ CD de maničre que A et E sont de part et d’autre de CD.
Soit AG la perpendiculaire ŕ EF. A et G sont de part et d’autre de CD, donc AG coupe CD en
un point H.
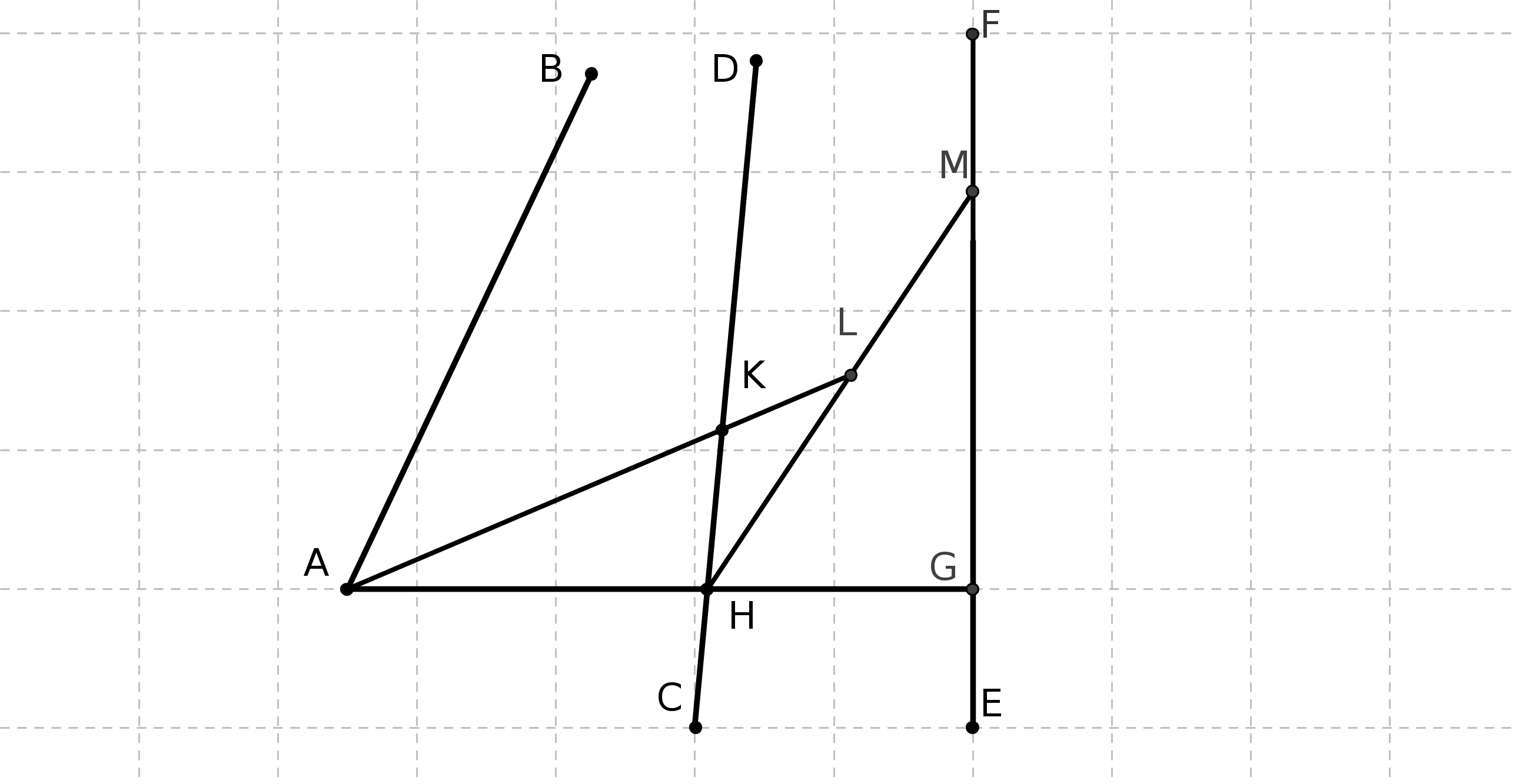
Soit une droite quelconque issue de A et coupant l’angle . AB est h-parallčle ŕ CD donc cette droite coupe CD en un point K. Soit L un point sur le prolongement de AK et on joint HL.
CD est h-parallčle ŕ EF donc HL coupe EF en un point M. AL ne peut recouper ni AC, ni CM
donc elle coupe EF. Donc AB est H-parallčle ŕ EF.
Proposition 10.6 : deux droites h-parallčles s’approchent l’une de l’autre dans la direction
de leur parallélisme. Cela signifie que si l’on trace des perpendiculaires successives de
l’une sur l’autre, dans la direction de leur parallélisme, les perpendiculaires sont plus
courtes.
Démonstration : soient deux droites h-parallčles CD et AB et deux perpendiculaires EF et GH
de CD sur AB.
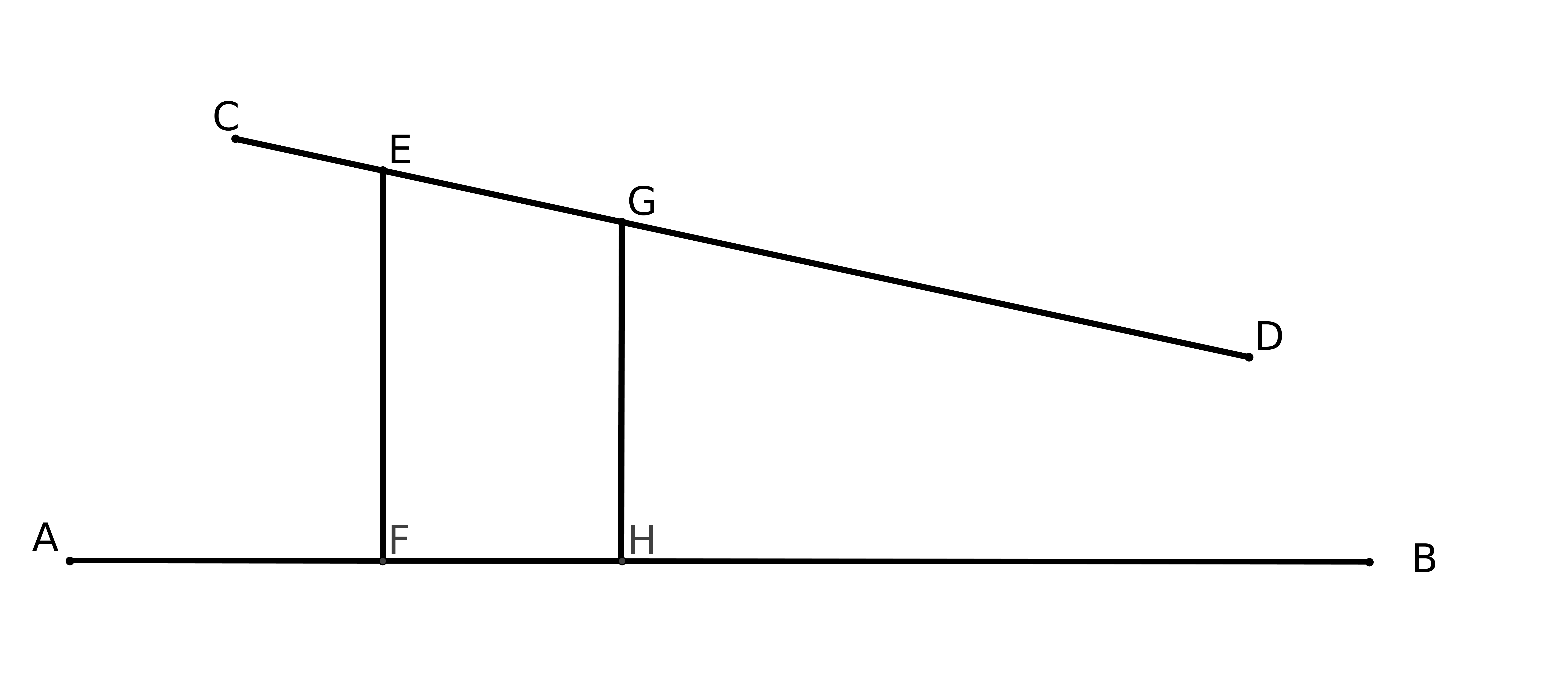
1. les angles et sont aigus.
2. Donc est obtus.
3. D’aprčs le lemme 10.1 on a .
Proposition 10.6bis : Soient deux droites h-parallčles entre elles, AB et CD, et une autre
droite donnée EF. Alors il existe un point G de CD tel que la perpendiculaire GH de CD sur AB est
égale ŕ EF.
Démonstration : Prenons au hasard un point G sur CD et traçons la perpendiculaire GH ŕ
AB.
Cas 1 : Si GH=EF, c’est terminé.
Cas 2 : Si :
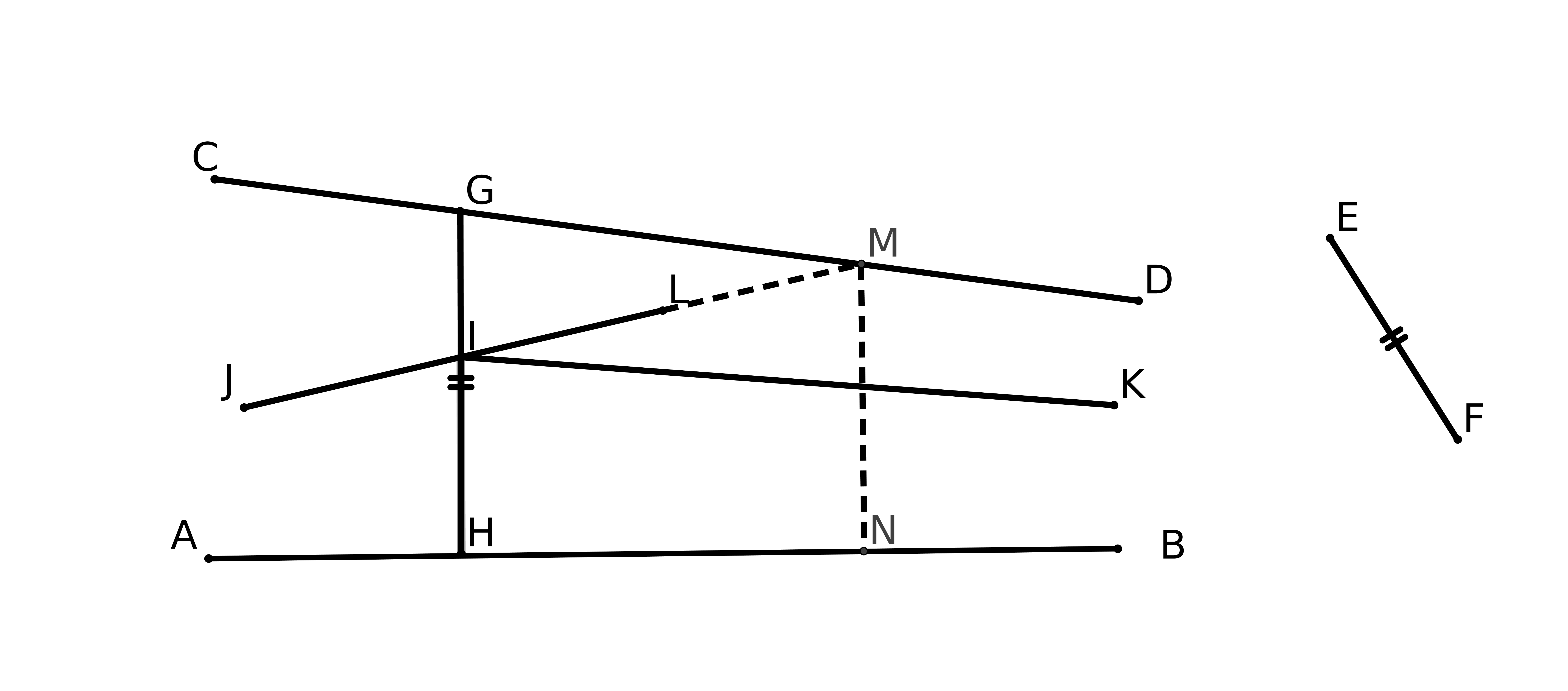
1. On prend I sur GH tel que .
2. On trace une h-parallčle, IJ, ŕ AB dans le sens contraire du parallélisme de AB et CD. Puis
on trace la h-parallčle, IK, ŕ AB dans l’autre direction.
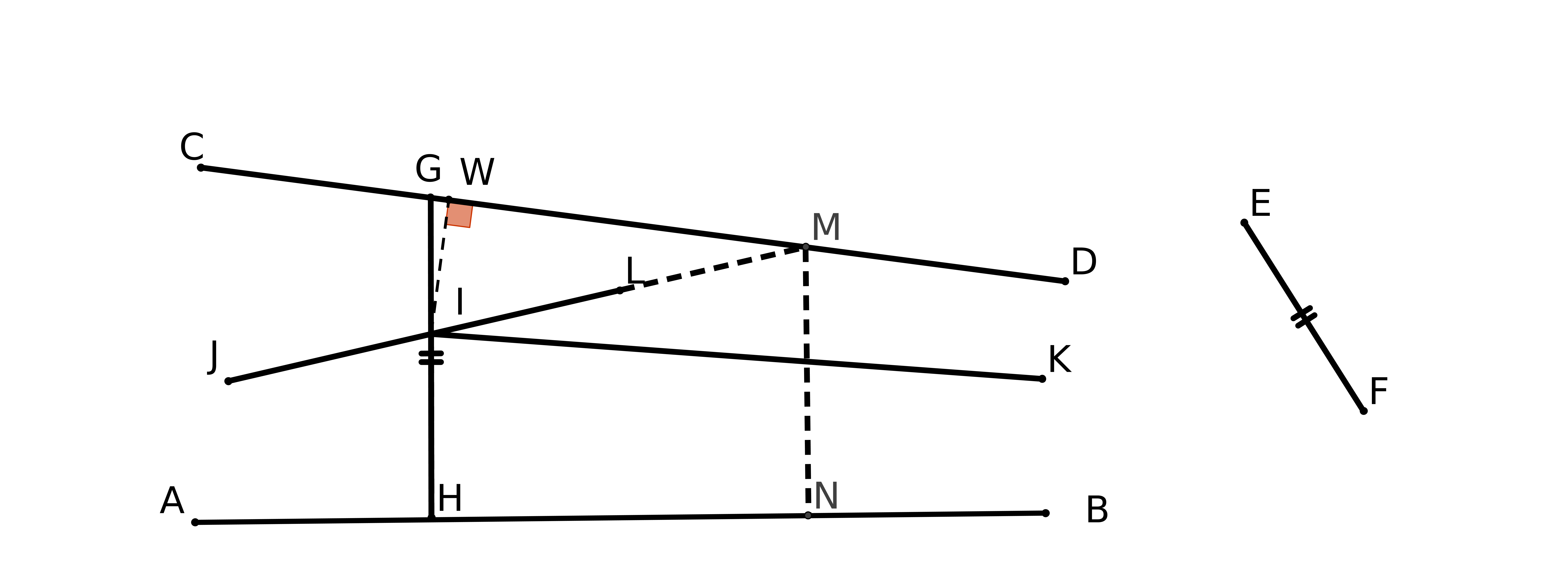
3. On prolonge IJ en L. On a aigu et donc est aigu. Comme est aigu, est obtus donc IL coupe l’angle . D’oů la figure.
4. IL n’est pas une h-parallčle dans la direction de parallélisme de AB, sinon IK couperait AB. donc IL coupe CD en un point M. Soit MN la perpendiculaire ŕ AB et soit O le point de MD tel que MI=MO.
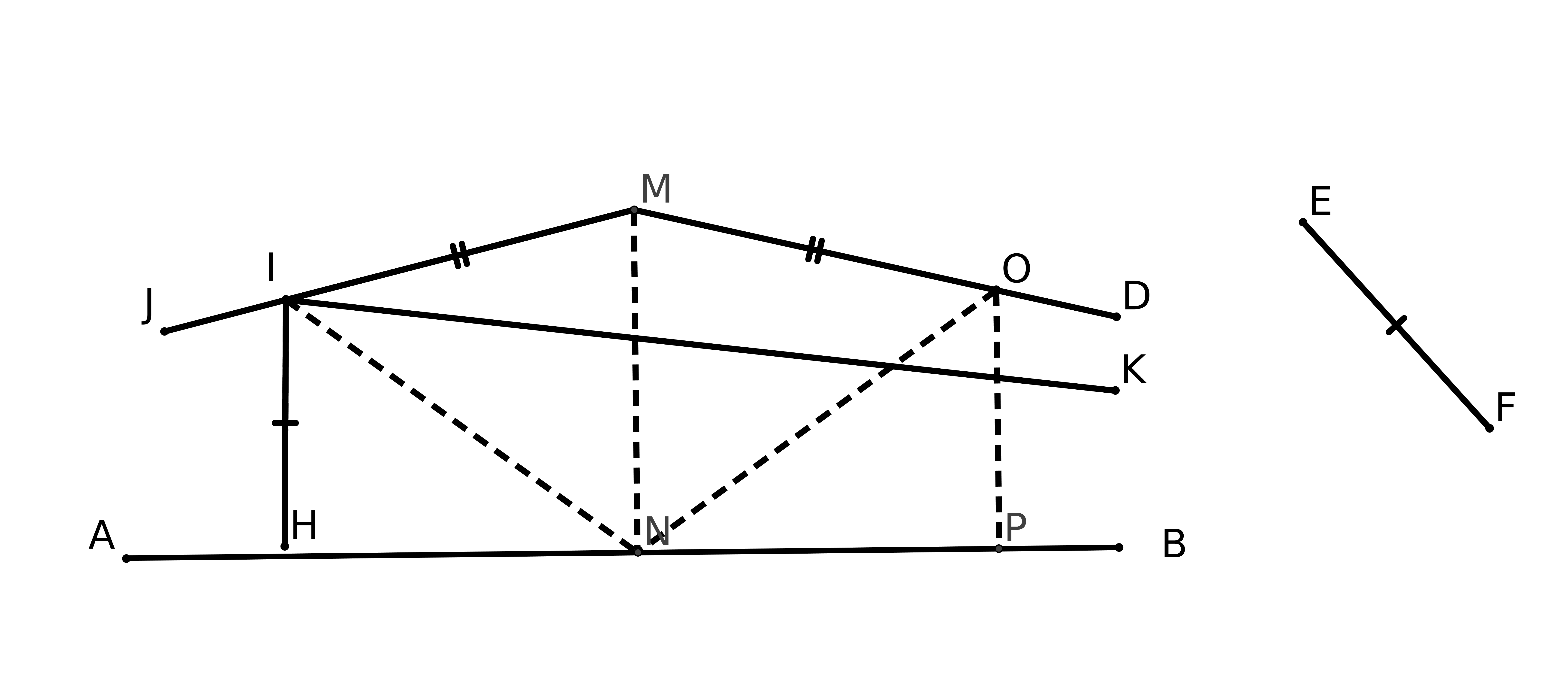
5. On trace la perpendiculaire OP ŕ AB.
6. On a (Prop 10.1). Donc les triangles IMN et OMN sont égaux donc .
7. Donc .
Donc les triangles IHN et ONP sont égaux donc IH=OP=EF. CQFD.
Cas 3 : Si :
męme démonstration.
Proposition 10.7 : Soient deux droites h-parallčles dans la męme direction, AB et CD. Si on
prolonge CA en un point E, l’angle extérieur sera supérieur ŕ l’angle intérieur et opposé, c’est-ŕ-dire
.
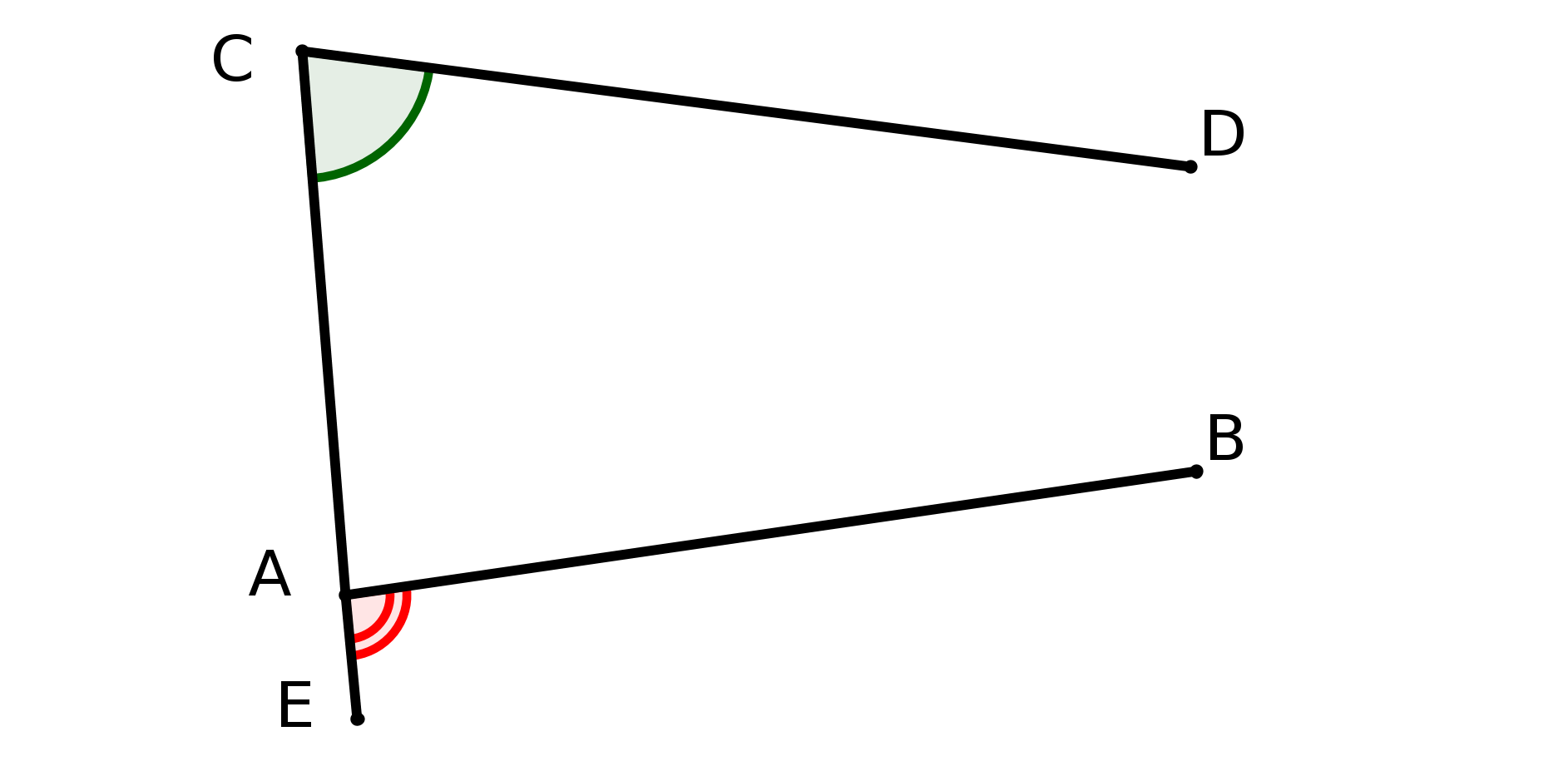
Démonstration :
1. Supposons et traçons la droite CF telle que .
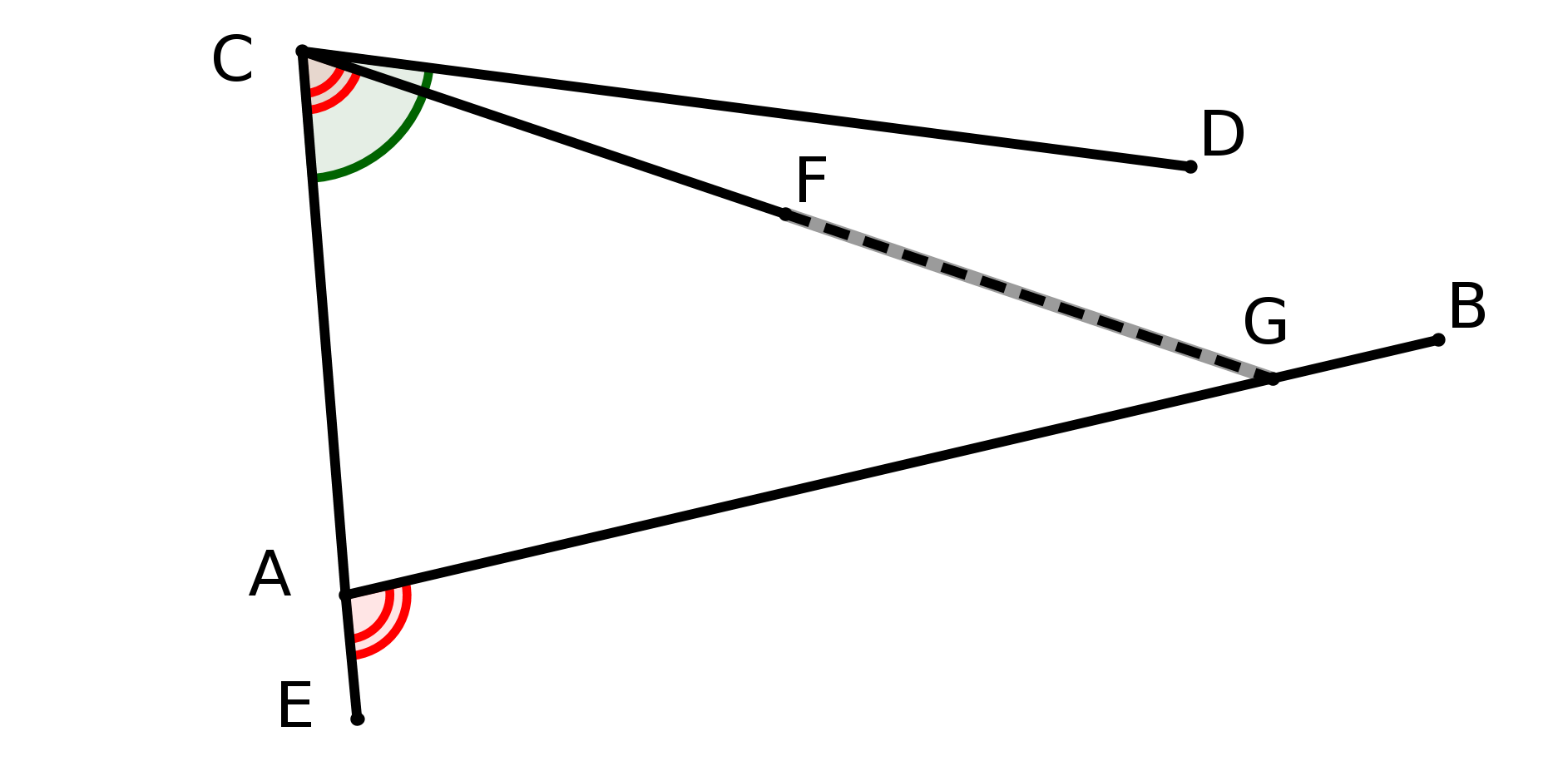
2. et donc donc CF coupe l’angle . D’oů la figure.
3. CD est une h-parallčle ŕ AB donc CF coupe AB en un point G.
4. Dans le triangle GCA on a :
(th 16.1) donc .
Contradiction. Donc .
5. Supposons . ne peut ętre droit ou alors AB et CD auraient une perpendiculaire commune : impossible (corollaire de P.10.4).
On suppose obtus. Le cas aigu revient au męme pour la démonstration qui suit. Soit F le milieu de CA et soit FH la perpendiculaire ŕ AB et soit G le point du prolongement de CD tel que GC=AH.

6. Les triangles GCF et AFH sont égaux (th 4). Donc donc G, F et H sont alignés. De plus droit. Donc GF est perpendiculaire ŕ CD.
7. Mais CD est une h-parallčle ŕ AB donc
est aigu.
Contradiction. Donc .
Proposition 10.8 : soient deux droites coupées par une troisičme droite faisant avec elles des
angles alternes-internes (ou correspondants) égaux. Alors les droites du début sont des droites
d-parallčles.
Démonstration : Soient AB et CD coupées par une droite EF en deux points G et H tels que
.
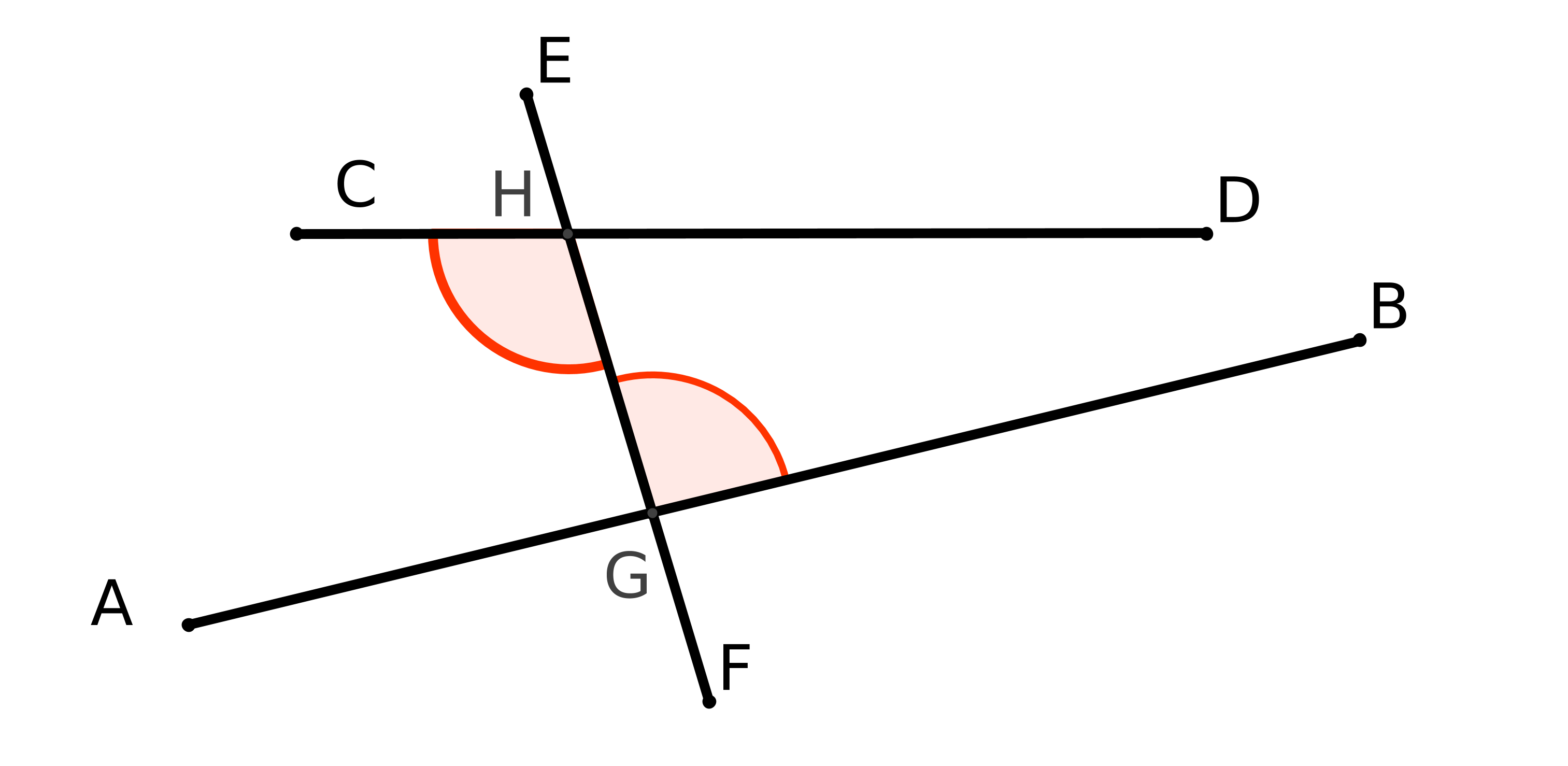
1. Les droites CD et AB sont parallčles (th 27.1 ou 28.1).
2. Supposons que AB et CD sont h-parallčles de A vers B. Alors :
(P.10.7) donc
2 droits2 droits donc
. Contradiction.
3. De męme les droites ne sont pas h-parallčles de B vers A. Donc les droites sont
d-parallčles.
Proposition 10.9 : soient quatre droites AB, CD, EF et GH telles que :
1. AB et CD h-parallčles ainsi que EF et GH.
2. AC=EG et .
Alors .
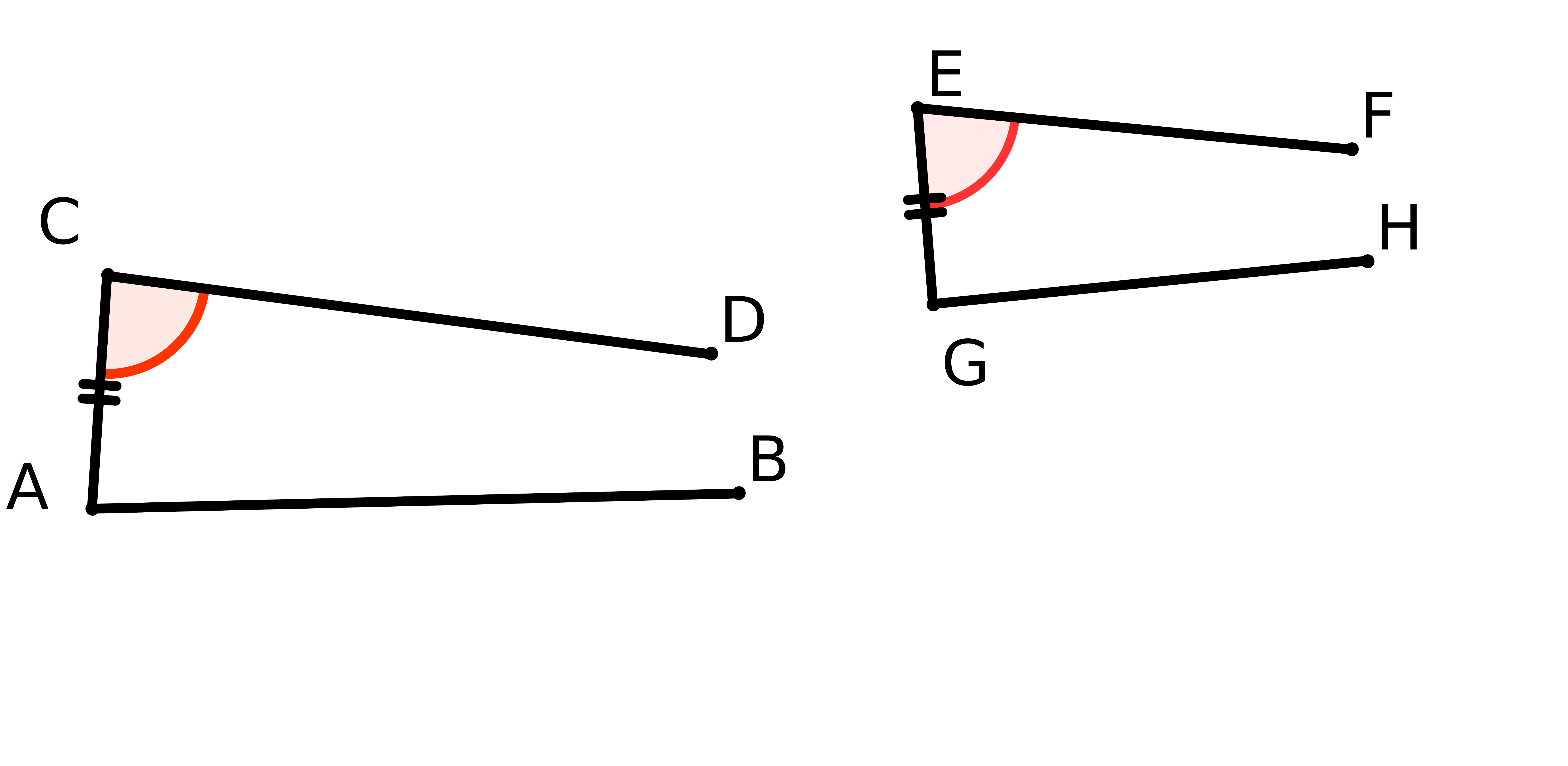
Démonstration :
1. Supposons . Traçons I tel que .
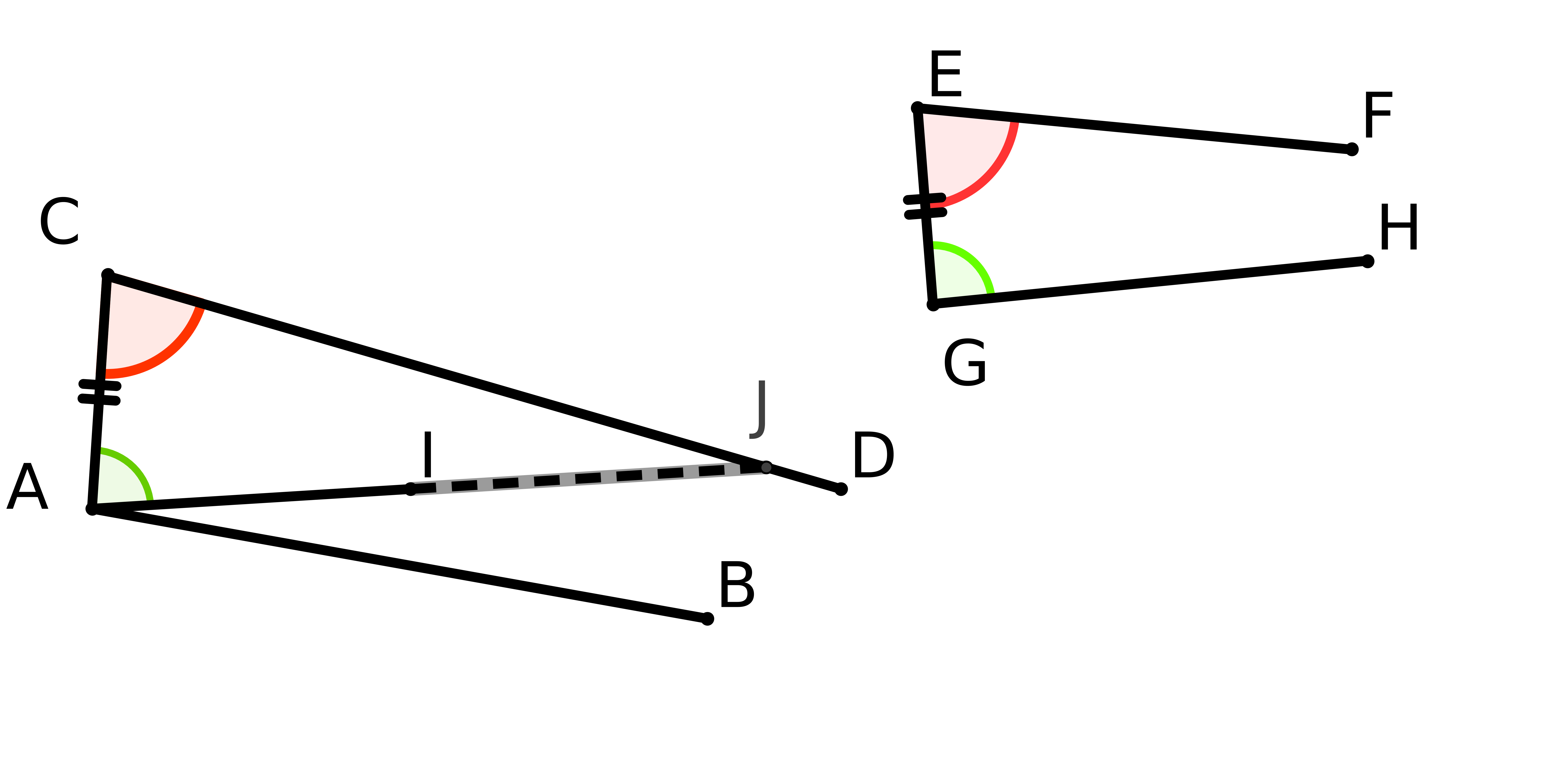
2. Donc AI coupe .
3. AB est h-parallčle ŕ CD donc AI coupe CD en un point J.
4. Soit K tel que EK=CJ.
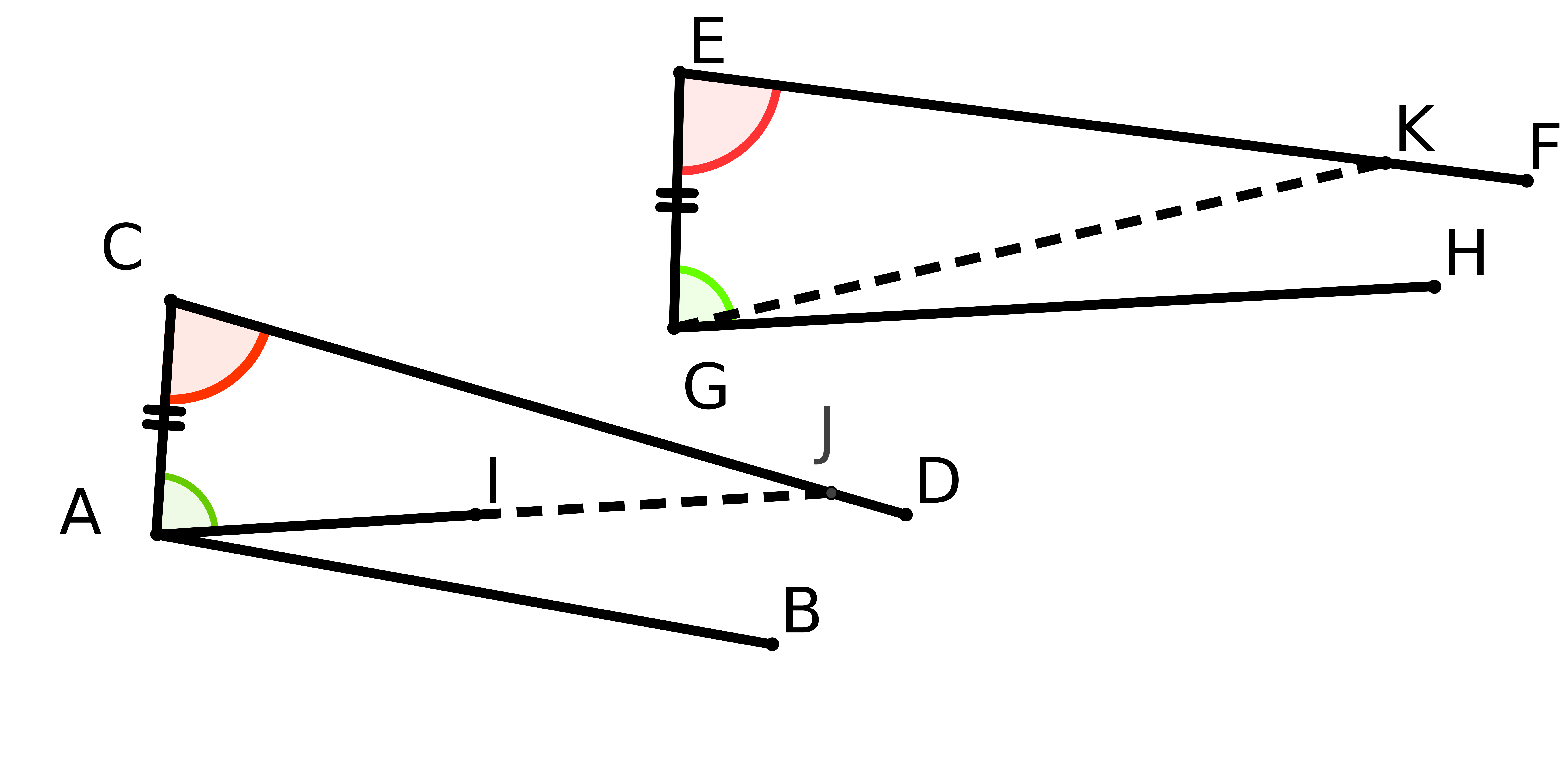
5. Les triangles JCA et KEG sont égaux (th 4.1). Donc . Or . Donc impossible. Donc .
6. On démontrerait de męme que l’on n’a pas
. Donc
.
Proposition 10.10 : soient quatre droites AB, CD, EF et GH telles que :
1. AB et CD h-parallčles ainsi que EF et GH.
2. et .
Alors AC=EG .
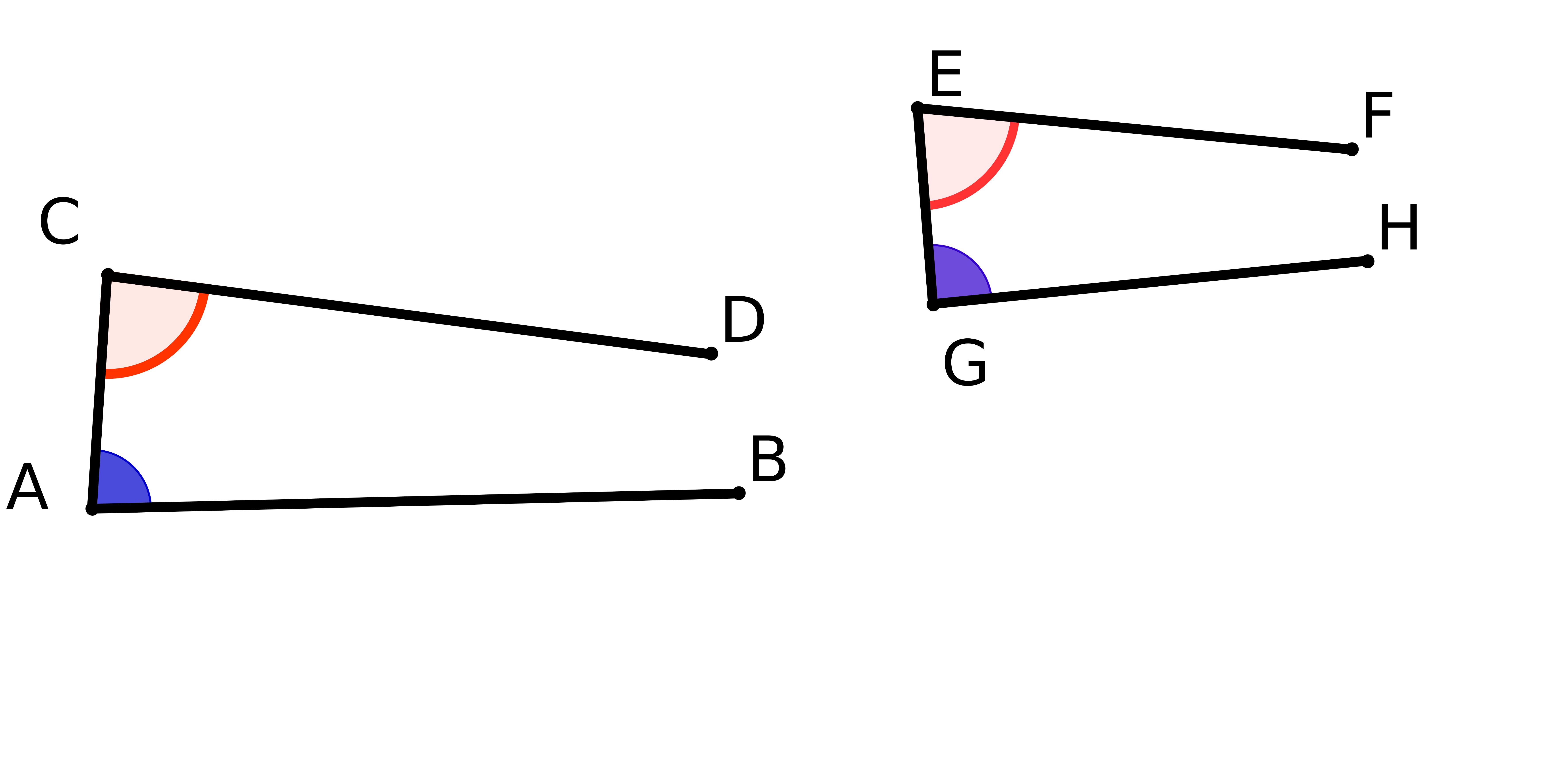
Démonstration :
1. Supposons . Soit I le point de AC tel que et traçons la h-parallčle, IJ, ŕ AB dans la męme direction que CD et AB.
2. Alors (P. 10.9). Donc . Impossible car (th 10.7).
3. Donc l’hypothčse est fausse.
De męme pour l’hypothčse
(męme démonstration). Donc .
Théorčme 10.11 : Soient AB et CD deux droites h-parallčles telles que
AC et DB soient perpendiculaires ŕ AB. On prolonge CD en E. Alors on a :
.
Démonstration :
1. Supposons : c’est possible d’aprčs le théorčme 10.5.
2. Soit F le point de AC tel que . Soit FG la h-parallčle ŕ CD de C vers D. Alors on a : (P.10.9).
3. Et (th
10.7). Donc .
Définition 3.10 : soit une droite, CD, h-parallčle ŕ un droite AB. Soit E un point de CD
et soit EH la perpendiculaire ŕ AB. On appelle angle de parallélisme l’angle aigu,
, et on
le note
oů est
égal ŕ EH.
Proposition 10.12 :
1. L’angle de parallélisme dépend de .
2. Plus est
petit et plus
se rapproche de l’angle droit.
La démonstration se déduit de maničre évidente de ce qui précčde (cf. P.10.7).
Remarque : si
est petit on peut considérer, en approximation, qu’il existe une seule parallčle ŕ AB passant par
E. On retombe ainsi dans le cas euclidien.
Proposition 10.13 : Dans un triangle rectiligne la somme des angles est inférieure ŕ deux
droits.
Démonstration : On note "deux droits" par . Reprenons la démonstration de Legendre.
1. On est parti d’un triangle ABC tel que . Puis on a construit une suite de triangles tels que :
Pour tout on a :
, , et .
Et on a démontré que, pour tout , et . Ainsi :
Pour tout , il existe tel que pour tout on a : et .
De plus . Donc, pour tout , .
Ainsi pour tout
on a ,
donc .
Remarque : si ABC est équilatéral cela revient au męme : on se retrouve dans la situation précédente ŕ partir de .
2. Donc pour tout triangle la somme des angles est inférieure ou égale ŕ .
3. Supposons que dans un triangle ABC la somme des angles est égale ŕ . ABC est la réunion de deux triangles rectangles, par exemple ABH et ACH. Si la somme des angles de ACH est strictement inférieure ŕ , la somme des angles de ABH sera strictement supérieure ŕ , ce qui est impossible d’aprčs ce que l’on vient de démontrer. Donc la somme des angles de ACH est égale ŕ .
4. On construit l’angle ACD (th 23.1) tel que et tel que . Alors (th 27.1) les droites HA et CD sont parallčles et (th 4.1) les triangles AHC et ACD sont égaux donc, en particulier, on a droit. De plus . Donc les angles et sont droits. Donc les droites AH et CD sont d-parallčles.
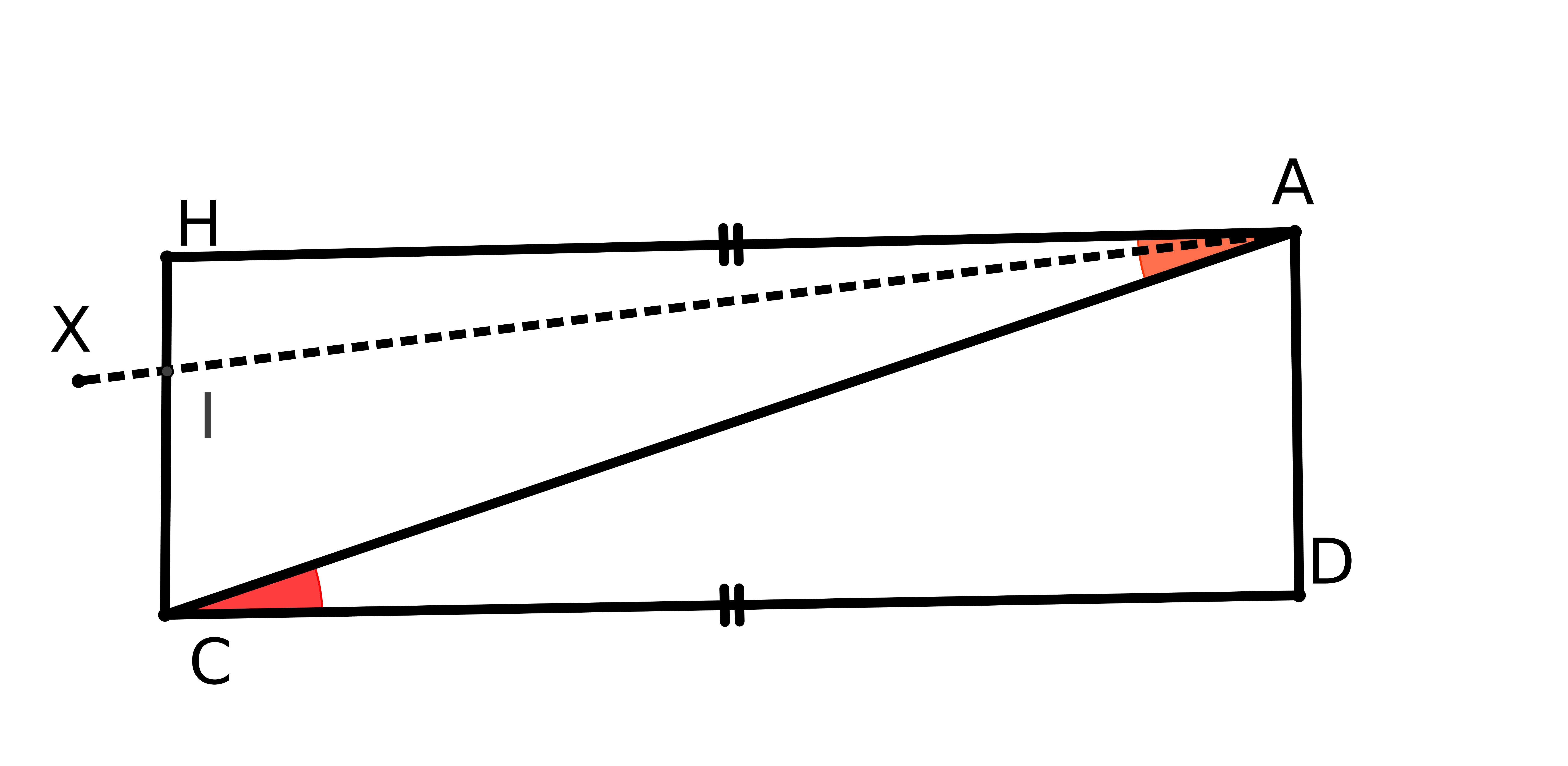
5. Soit AX la h-parallčle ŕ CD de D vers C. AH est une d-parallčle ŕ CD et AC coupe CD donc AX
coupe l’angle .
Par suite AX coupe HC en un point I.
6. D’aprčs P.10.11, . De plus, .
Donc .
Et on a : . Donc
.
C’est impossible. Donc la somme des angles de ABC ne peut-ętre égale ŕ deux droits.
Proposition 10.14 : la somme des angles d’un quadrilatčre est inférieure ŕ quatre
droits.
Démonstration :Un quadrilatčre est la réunion de deux triangles donc la somme de ses angles
est strictement inférieure ŕ quatre droits.
Proposition 10.15 : tout quadrilatčre de Saccheri a deux angles droits et deux angles aigus
égaux.
Démonstration : la somme des angles de ce quadrilatčre est strictement inférieure ŕ quatre
droits. Il a deux angles droits donc la somme de ses deux autres angles est inférieure ŕ
deux droits. D’aprčs le lemme 10.1 ces deux angles sont égaux donc chacun d’eux est
aigu.
Théorčme 10.16 il n’existe pas de triangles semblables autres que les triangles
égaux.
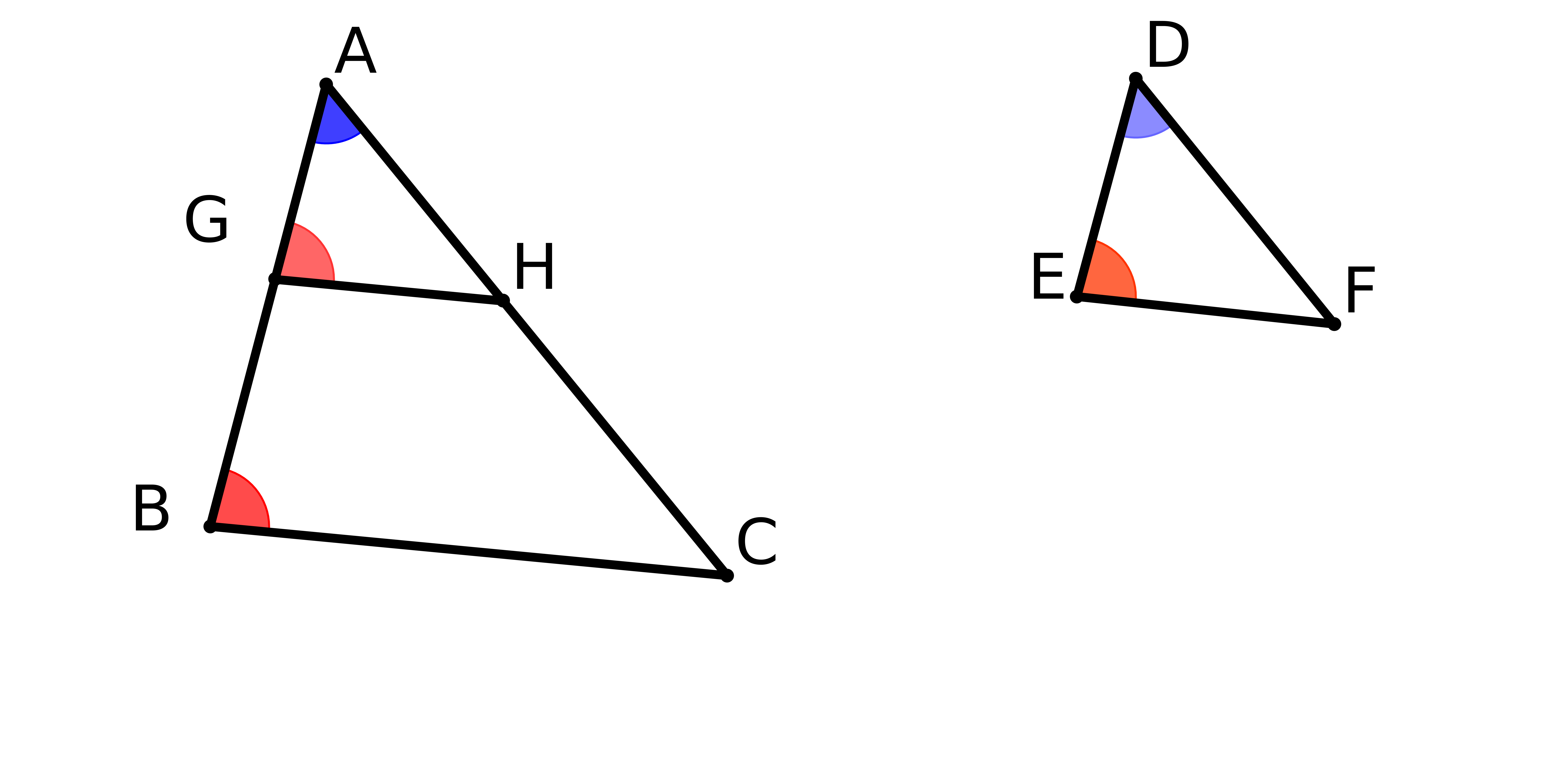
Démonstration : Soient deux triangles ABC et DEF semblables tels que les angles A, B et C sont respectivement égaux aux angles D, E et F et tels que .
Soit le triangle AGH (cf sur la figure) tel que AG=DE et AH=DF. Alors (th 4.1) les triangles DEF et AGH sont égaux donc leurs angles aussi.
Donc . Donc les droites GH et BC sont parallčles (th 27.1).
Mais alors il est facile de démontrer que la somme des angles de BCHG est égale ŕ quatre
droits. Ce qui est impossible. Donc si ABC et DEF ont leurs angles égaux deux ŕ deux ils sont eux
męmes égaux.
Proposition 10.17 : deux droites d-parallčles ont une unique perpendiculaire commune.
De plus elles sont divergentes : cela signifie que, si on trace une perpendiculaire d’une des droites
sur l’autre, plus on s’éloigne de la perpendiculaire commune et plus la perpendiculaire sera
grande.
Démonstration :
Soient deux droites d-parallčles,AB et CD.
Unicité : supposons qu’elles admettent deux perpendiculaires communes EF et GH.
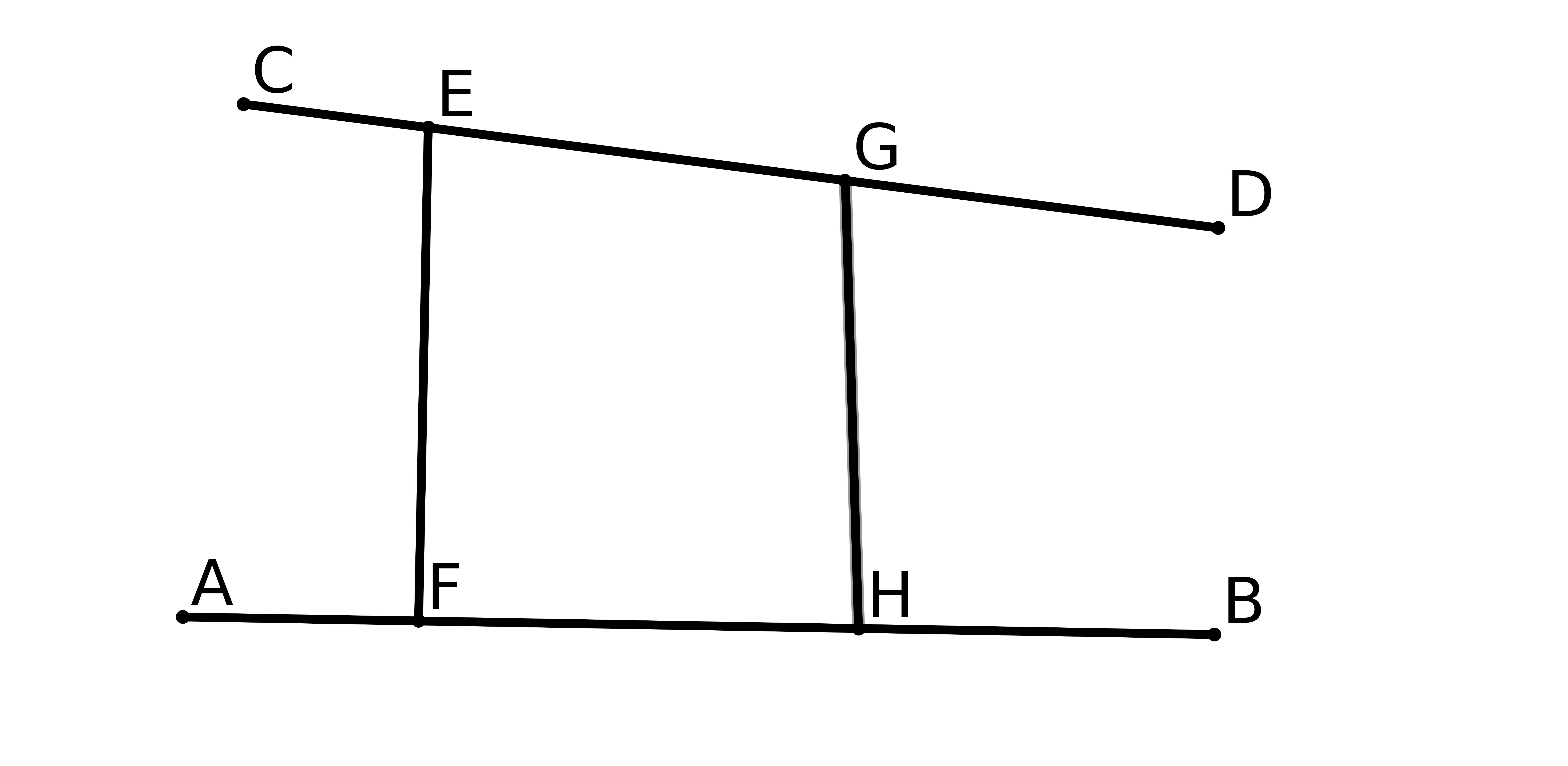
Alors le quadrilatčre EFHG aurait quatre angles droits. Donc la somme de ses angles serait
égale ŕ quatre droits. C’est impossible donc il ne peut y avoir qu’une seule perpendiculaire
commune aux deux droites.
Existence :
Soient E et G deux points de CD et soient les perpendiculaires EF et GH ŕ AB.
A. Supposons que :
Alors la droite qui joint les milieux I et J de EG et FH est perpendiculaire aux deux
droites.
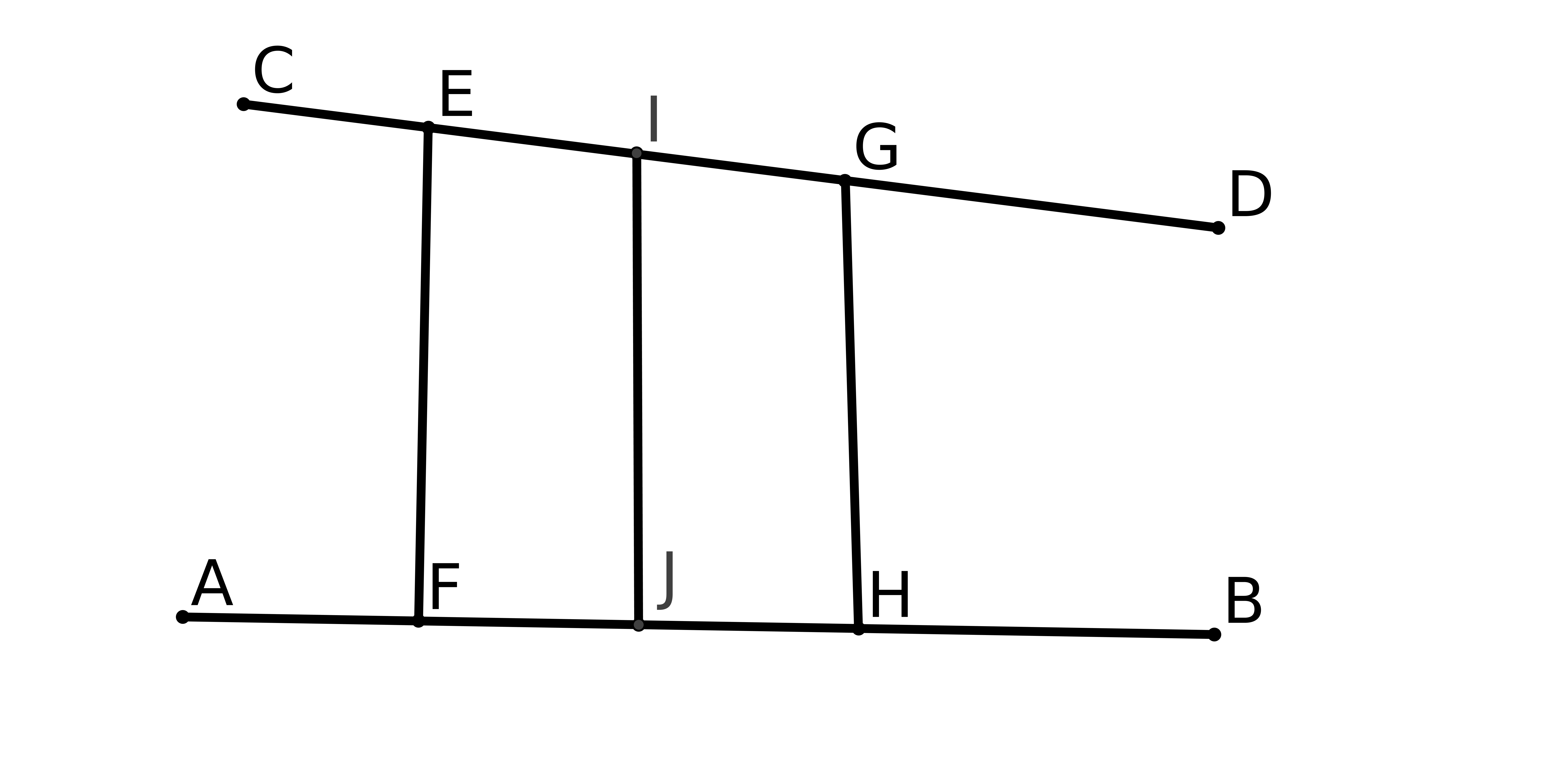
En effet : les triangles EFJ et GHJ sont égaux (th 4.1) donc EJ=GJ. Donc les triangles EJI et GJI, ayant trois côtés égaux, sont égaux et donc droit.
En faisant le męme type de démonstration on montre que
. D’oů
le résultat.
B. Supposons que .
L’idée est de se ramener ŕ la situation précédente.
On trace les h-parallčles ŕ CD, FI et HJ, passant par F et H et de C vers D. D’aprčs P.10.7, on a .
Soit la droite FK telle que .
Alors la droite FK coupe CD en un point L, puisque FI est h-parallčle ŕ CD.
Soit le point M tel que et
soit la droite MN telle que .
En appliquant P.10.9, on démontre que MN et FK sont h-parallčles. En effet, si MN et FK se coupaient en un point L et en prenant le point L’ de GD tel que GL’=ML, on obtiendrait que HJ et GD se couperaient : ce n’est pas le cas.
Donc MN ne coupe pas FK et étant intérieure au triangle EFL elle coupe le côté EL en un
point O.
Soit Q le point de CD tel que
et .
Alors les triangles OMF et QGH sont égaux (th 4.1). Donc
et
.
Soient P et R les points tels que OP et QR sont perpendiculaires ŕ AB.
De on en
déduit que .
Donc (th 26.1) les triangles OFP et QHR sont égaux. Donc
. Donc
on est ramené au A. La perpendiculaire commune aux droites AB et CD est la droite qui joint les
milieux de OQ et PR.
Divergence :
Soient deux droites d-parallčles, EF la perpendiculaire commune, GH et IJ deux perpendiculaires
ŕ AB issues de G et I.
1. Supposons . Soit M tel que FM=HG. Alors MFHG est un quadrilatčre de Saccheri donc est aigu. Mais (th 16.1) . Or est droit donc est obtus : contradiction. Donc .
De plus non égal ŕ
. En effet cela impliquerait
que soit aigu alors
qu’il est droit donc .
2. Supposons . Soit K tel que HK=IJ. Alors KHJI est un quadrilatčre de Saccheri donc est aigu. Mais (th 16.1) .
Le quadrilatčre EFHG a trois angles droits donc le quatričme est aigu. Donc est aigu. Donc est obtus donc est obtus : contradiction. Donc .
De plus non égal ŕ
. En effet cela impliquerait
que soit aigu alors
qu’il est obtus donc .
Le texte suivant est extrait du livre "Cours d’Analyse, Tome II : Topologie" de Gustave Choquet (1964).
"La topologie générale ne constitue un corps de doctrine cohérent que depuis un demi-sičcle ; elle est l’aboutissement d’un mouvement d’idées qui remonte ŕ l’antiquité. Les notions de limite et de continuité s’imposčrent aux mathématiciens grecs dčs qu’ils tentčrent de préciser la notion de nombre. Il fallut ensuite attendre Cauchy (1821) et Abel (1823) pour que se clarifient les notions de suite et de série convergentes, et celle de fonction continue. Avec Riemann (1851) le cadre s’élargit ; dans sa leçon inaugurale "Sur les hypothčses qui servent de fondement ŕ la géométrie", il trace un programme grandiose :L’étude de " la notion générale de grandeur plusieurs fois étendue ", entendant par lŕ non seulement les variétés ŕ un nombre quelconque de dimensions, mais aussi les espaces de fonctions et d’ensembles.
Mais un tel programme ne pouvait pas ętre réalisé sans une meilleure connaissance de la droite réelle ( Dedekind) et des fonctions numériques (Riemann,Weierstrass), ni surtout sans un langage ŕ la fois précis et général ; c’est Cantor(1873) qui créa ce langage et ouvrit la porte d’un monde nouveau.
Une période héroďque et féconde commence alors. Malgré l’opposition des mathématiciens hostiles aux nouvelles idées, les découvertes se succčdent, particuličrement en France (Poincaré,Hadamard,Borel,Baire,Lebesgue) et en Allemagne (Klein,Mittag-Leffler). On en vient rapidement ŕ étudier des fonctions de lignes, et ŕ créer une analyse fonctionnelle (Ascoli ,Volterra,Hilbert) qui est un début de réalisation du programme de Riemann.
Mais ŕ nouveau se manifeste le besoin d’un langage et d’un cadre adaptés ŕ ces recherches :
Les espaces métriques, définis par Fréchet, fournissent un outil, essentiel pour l’étude de la
continuité uniforme et de la convergence uniforme, et commode aussi pour l’étude des
structures topologiques. Hausdorff, enfin, parvient ŕ dégager d’une jungle d’axiomes,
un systčme axiomatique simple, qui est la pierre angulaire de la topologie générale
actuelle."
Jusqu’ŕ présent on n’a pas parlé de distance. Une grandeur était plus petite qu’une autre parce que, en la déplaçant, elle était une partie de l’autre.
Rappelons que pour Euclide il ne peut exister de distance absolue puisqu’il n’y a pas de nombres irrationnels et qu’aucune grandeur ne peut mesurer toutes les autres grandeurs.
A partir du moment oů tout le travail indiqué par Choquet a été fait, il est facile de parler de
distance.
Définition :
Soit un ensemble E. Une distance dans E est une fonction, notée d, de dans qui vérifie :
1. .
2. .
3.
.
Remarque : naturellement, on déduit de 1., 2. et 3. que pour tous
et
de E,
.
Une fois
créé il est facile d’introduire une distance dans les Eléments d’Euclide : soit un segment
quelconque AB. Il mesure alors tout autre segment. Alors si l’on prend deux points M et N
du plan on peut leur associer un nombre et un seul, d(A,B), d vérifiant la définition
précédente.
Il existe de nombreux exemples de distances et nous verrons celle qui correspond ŕ la
géométrie de Lobatcheski.
Soit
l’ensemble des complexes.
Définition : Soient
et deux complexes
on appelle chemin de
ŕ toute
fonction
de classe ,
par morceaux (c’est ŕ dire différentiable par morceaux et de dérivée continue) de
[ ;],
et
étant deux
réels, dans
telle que et
.
Prenons dans la distance définie par :
.
Soit un chemin joignant ŕ et soit une subdivision {(), } de [ ;] telle que :
Alors une approximation de la longueur de , notée , est donnée par :
.
Mais .
De telle sorte que :
.
Et donc par similitude avec l’intégrale de Riemann on prendra comme définition la
suivante :
Définition : la longueur d’un chemin est donnée par :
Proposition 2.1 : On a :
étant un
chemin joignant
ŕ .
Démonstration :
1. Soit une isométrie. Alors :
oů et quelconque.
On a :
car .
2. Soit un un chemin joignant ŕ . Il existe une isométrie telle que et oů . Alors transforme en un chemin tel que et . On a :
a. d’aprčs 1. et
b. si on pose on en déduit que et . On a :
donc
donc
donc
donc
.
Mais le est un chemin joignant 0 ŕ donc
et le chemin le plus court de
ŕ est le
segment
Soit U un disque ouvert de .
On suppose maintenant que chaque point de U a un "poids", une qualité particuličre. De telle sorte
que la longueur d’un chemin va dépendre des points qu’il contient. Précisons :
Définition : une fonction poids est une application continue et strictement positive de U dans
.
Soit une fonction poids définie sur U.
Soit un
chemin reliant
ŕ ,
deux points de U. En faisant le męme raisonnement que plus haut, une approximation de
est :
.
Et donc, comme précédemment, on énoncera la définition suivante :
Définition : la longueur d’un chemin est donnée par :
Propriété 2.2 : Soit un chemin joignant ŕ . Soit un chemin joignant ŕ . Soit un chemin joignant ŕ passant par tel que
Im=ImIm. Alors
.
On notera .
Démonstration : les hypothčses nous permettent de poser pour :
et
,
et
étant choisis convenablement.
Puis on calcule .
La définition précédente nous permet de définir une distance dans U.
Propriété 2.3 : On pose, pour tous et de U,
étant un chemin joignant ŕ .
Alors
est une distance sur U.
Démonstration :
1. Il est clair que
2. Soit trois éléments de U, , et . On a :
, étant un chemin joignant ŕ tel que :
.
Et
, étant un chemin joignant ŕ tel que :
.
Donc
.
Mais
,
étant un
chemin de
ŕ .
Donc
et
ainsi
.
Donc
.
3. Si alors .
Si montrons que .
U est un disque ouvert de donc il existe tel que que le disque fermé D, de centre est de rayon est inclus dans U. Comme la fonction poids est continue sur D, elle atteint son minimum et donc, pour tout de D, on a .
Soit un chemin joignant ŕ . On a :
donc
a- Si , alors
. Mais
. Donc
b- Si il existe , alors il existe tel que et tel que
, et et . Donc
donc
Ainsi .
Donc
si et
seulement si .
Définition : Soit U muni d’une distance. Une isométrie est une bijection de U dans U, dérivable
dans ,
conservant les longueurs.
Pour les transformations de Möbius et les inversions on pourra consulter le livre "Visual complex analysis" de Tristan Needham. On pourra y découvrir beaucoup d’autres choses !
Définition : soient et quatre complexes tels que .
Une transformation de Möbius est de la forme
.
Remarque : nous verrons un peu plus loin leur lien avec la théorie de la relativité.
Propriété 2.4 :
1. Cas 1 : . Alors et .
donc donc est une similitude.
2. Cas 2 : . On a alors :
.
Une transformation de Möbius est la composée dans cet ordre :
de la translation, , définie par
de l’inversion géométrique, inv, définie par .
de la réflexion, , définie par .
de la similitude, , définie par .
de la translation, ,
définie par .
Remarque : on admet connus les résultats sur les similitudes. En particulier elles conservent les
angles donc, en particulier, l’orthogonalité.
Faisons quelques rappels sur l’inversion dont les propriétés sont moins connus des jeunes
étudiants.
Par simplification on identifiera un point M du plan et son affixe
.
Définition : soit un cercle de centre et de rayon . Une inversion dans , notée , est une application, définie par :
.
Vocabulaire : on dira indifféremment inversion de centre
et de
rapport ou
inversion de cercle K inversion dans le cercle K.
On démontre facilement que :
.
Notation : on posera par la suite .
On se contentera d’énoncer les propriétés suivantes sans démonstrations.
Proposition 2.5 : soient deux points ,
d’images
respectives
et . Alors les
triangles
et sont
semblables.
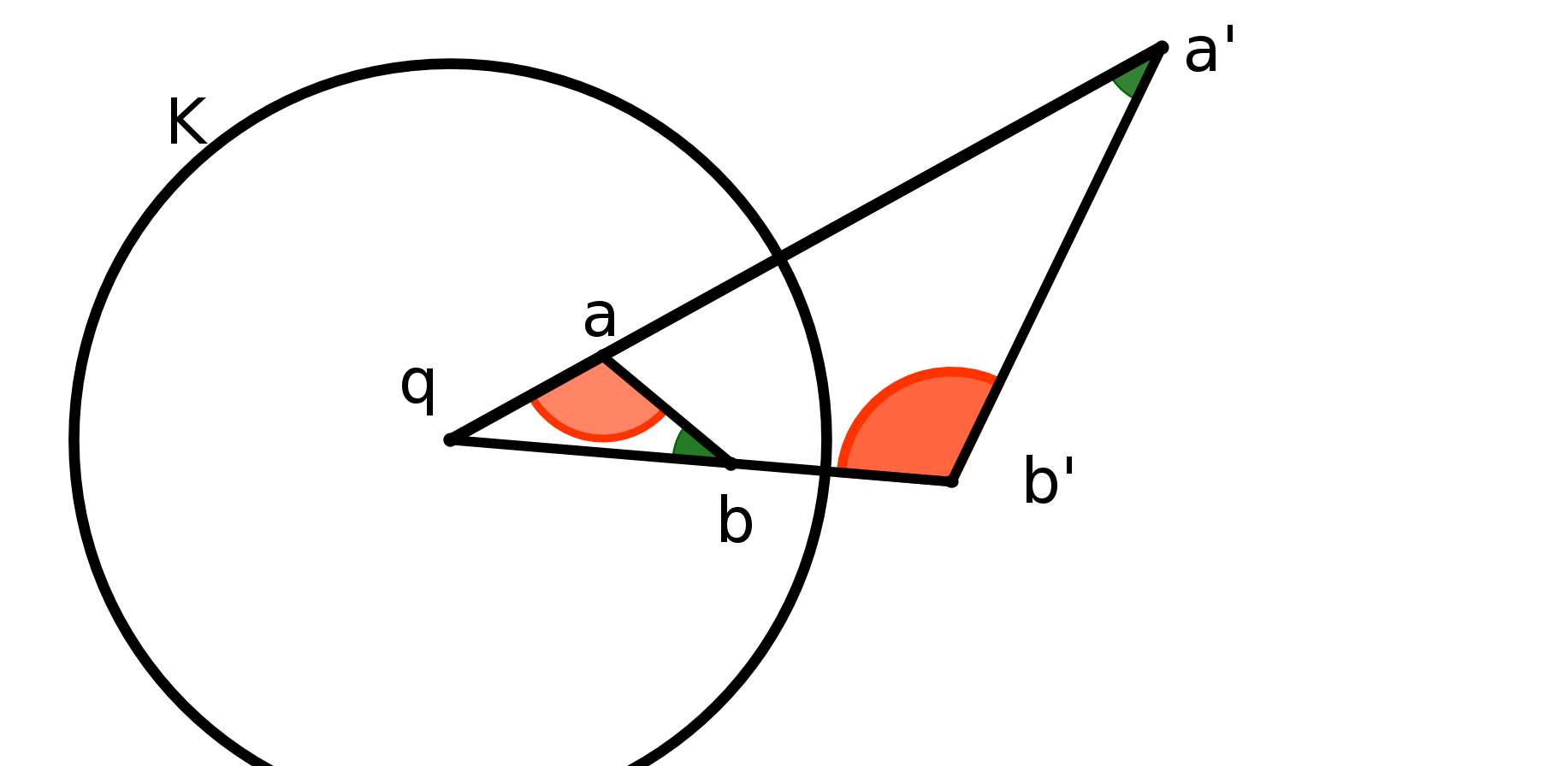
Proposition 2.6 :
l’image d’une droite passant par est invariante.
l’image d’une droite ne passant pas par
est un cercle passant par .
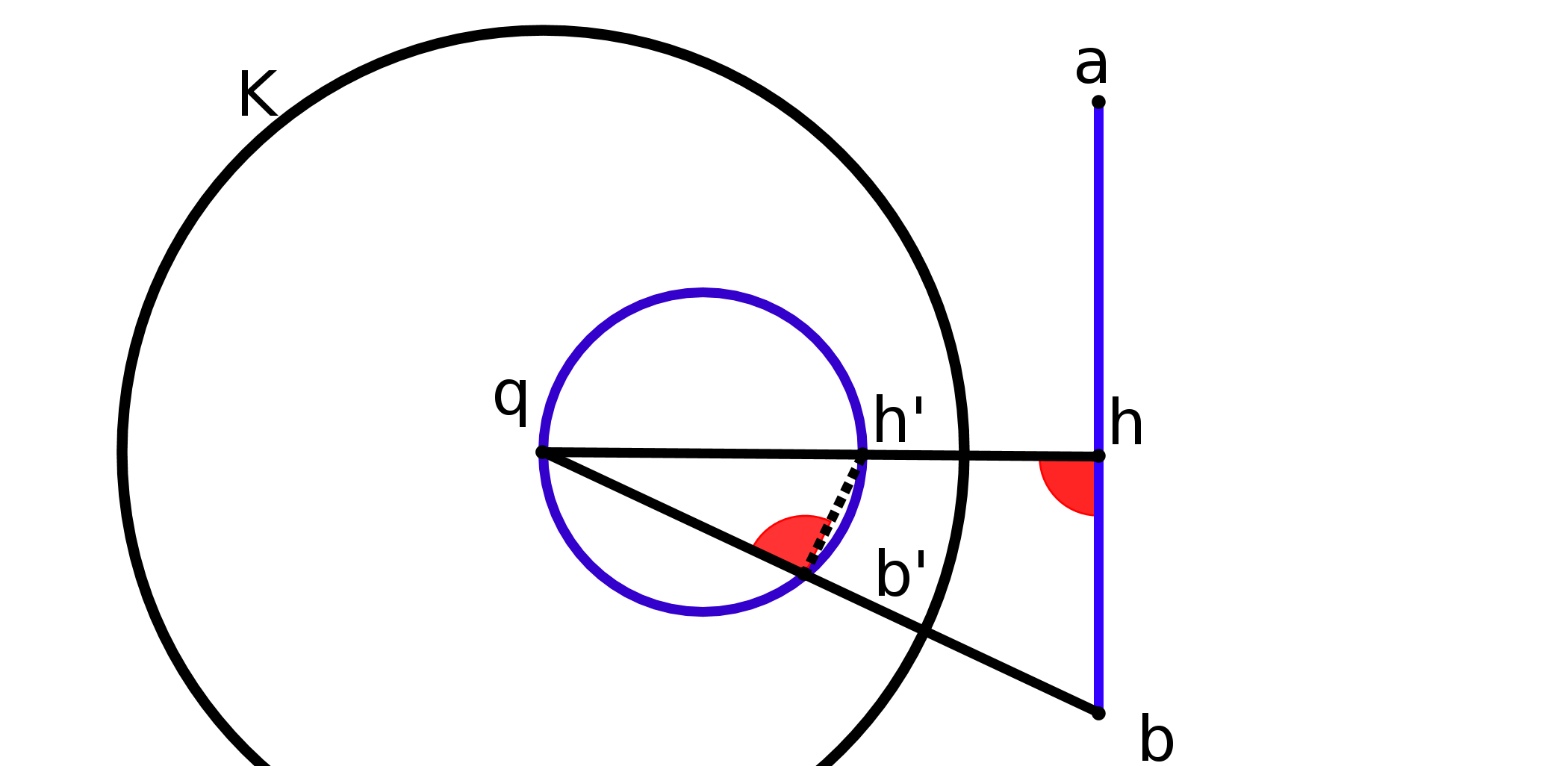
Proposition 2.7 :
1. L’image d’un cercle passant par q est une droite.
2. L’image d’un cercle ne passant pas par q est un cercle.
3. L’image de K est K.
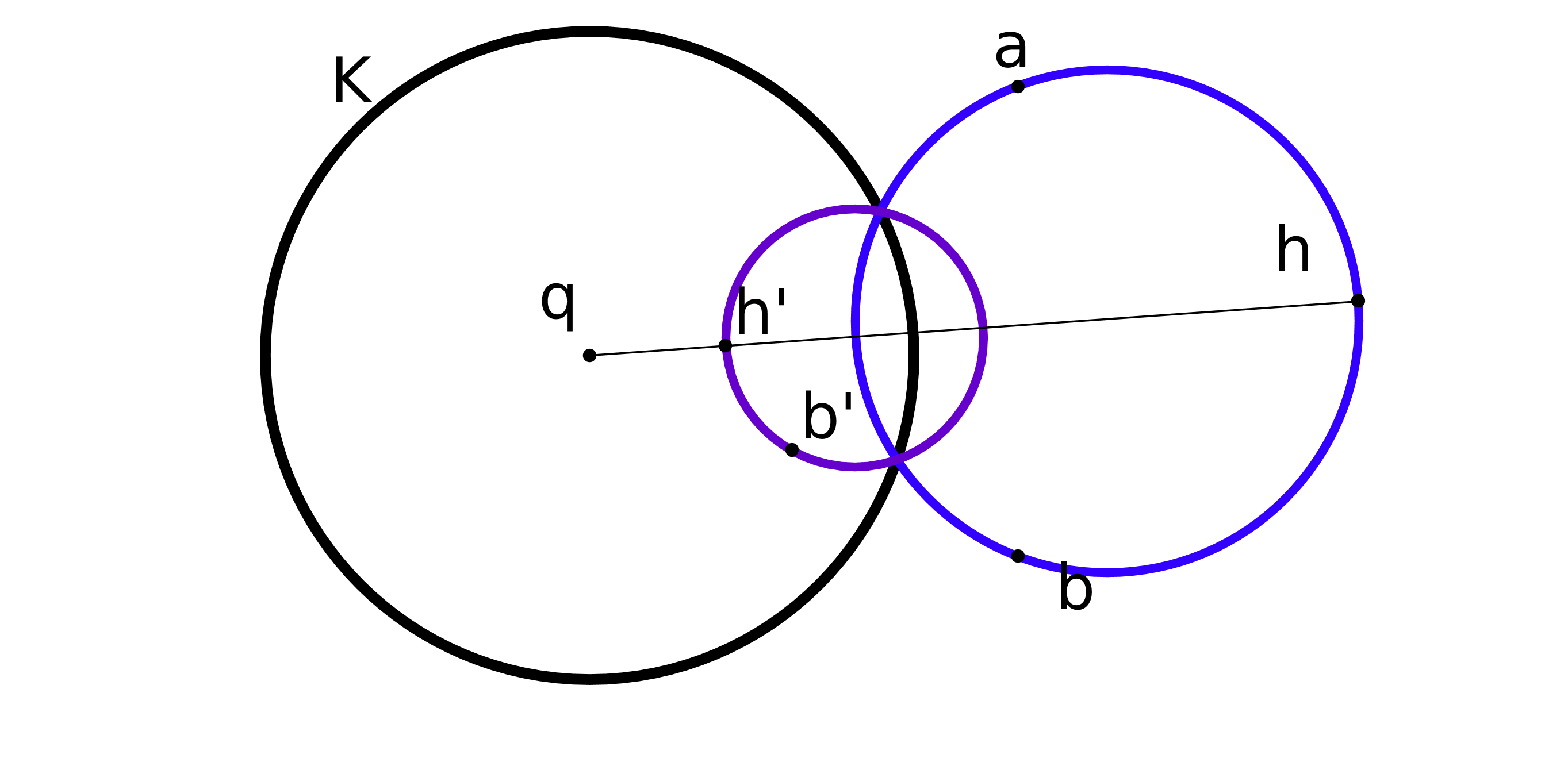
Proposition 2.8 :
L’inversion conserve les angles géométriques et en particulier l’orthogonalité.
Ainsi si deux courbes sont orthogonales leurs images le sont.
Définition :Soient deux courbes se coupant en un point P. Si elles admettent une tangente en P, nous définirons leur angle comme étant l’angle de droite aigu défini par leurs tangentes.
Définition : si une transformation conserve les angles (orientés) elle est dite conforme et
anticonforme si elle transforme les angles en leurs opposés.
Proposition 2.8 bis :
Les rotations et translations sont conformes et les réflexions ou inversions sont anticonformes. Les transformations de Möbius sont conformes.
Proposition 2.8 ter : l’image d’une droite ou d’un cercle, par une transformation de Möbius est
une droite ou un cercle.
Démonstration :
Soit une transformation de Mobius définie par . On sait que l’image d’une droite et d’un cercle par une similitude sont respectivement une droite et un cercle. Pour l’inversion ce n’est pas le cas.
est la composée d’une translation, , d’écriture complexe suivie de l’inversion, , dans le cercle, K, de centre O et de rayon 1.
1. Soit une droite .
a. Si par la translation la droite, , image de , passe par O alors, par , a pour image une droite. Donc par l’image de est une droite.
b. Si par la translation la droite, , image de , ne passe pas par O alors, par , a pour image un cercle. Donc par l’image de est un cercle.
2. Soit un cercle .
a. Si par la translation le cercle, , image de , passe par O alors, par , a pour image une droite. Donc par l’image de est une droite.
b. Si par la translation
le cercle, , image
de , ne passe pas
par O alors, par ,
a pour image un
cercle. Donc par
l’image de
est un cercle.
Soit U le disque ouvert de
de centre O et de rayon 1. On prend comme fonction poids la fonction
définie par :
étant
un réel strictement positif.
Proposition 3.1 : soit E l’ensemble des fonctions définies par :
.
Alors E est un groupe d’isométries de U.
Remarques :
est la rotation de centre O et d’angle .
est l’identité
de U, notée .
Démonstration :
1. Démontrons que :
.
En effet : . Et
et
.
2. Démontrons que est une bijection de sur .
Soit , équivaut ŕ . (1) On a donc (1) équivaut ŕ
.
Comme , . Et comme , d’aprčs 1., .
Donc
bijection de E dans E.
3. Démontrons que E est un groupe pour o.
a. Soient et . On a :
On a . Donc si on pose :
et on obtient :
. Donc o est une loi de composition interne.
b. On a .
c. On a .
Donc E est un groupe (non commutatif).
4. Démontrons que
est une isométrie de U.
a. Soit un chemin joignant ŕ , éléments de U. On a :
b- est holomorphe
dans U et
c- On a :
. Donc
. Or
et donc
donc
donc
.
Donc
est une isométrie de U.
Proposition 3.2 : E opčre transitivement sur U : pour tout
(,
) de
il existe une
isométrie
de E telle que .
Démonstration :
Cherchons et tels que .
On a : et donc
et
d’oů
le résultat.
Proposition 3.3 :
1.il n’existe pas d’autres isométries holomorphes de U autres que celles de E.
2. E est l’ensemble des bijections holomorphes de U.
Nous utiliserons le lemme de Schwarz, qui est une application du principe du maximum pour les
fonctions holomorphes. Pour les fonctions holomorphes on pourra se référer ŕ beaucoup
d’ouvrages ! En particulier le "Fonctions analytiques" de Cartan.
Rappelons qu’une fonction holomorphe d’un ouvert W de
dans
est une fonction
-dérivable, c’est-ŕ-dire
que, pour tout de
W le quotient a
une limite quand
tend vers .
Lemme de Schwarz : soit une fonction holomorphe dans le disque U telle que : et .
Alors pour tout de U, et .
Si pour un non nul
de U, on a l’égalité
ou si
alors
est une rotation de centre O.
Démonstration de la proposition 3.3 :
1. Soit
une isométrie holomorphe de U.
On va montrer que est la
composée de trois éléments de E, ,
et
tels que
est une rotation de centre
O et tels que . On va
donc faire en sorte que
vérifie le lemme de Schwarz.
a. Soit de
U et soit .
Alors
et .
Prenons donc pour et les éléments de E définis par :
de U, et
Alors est holomorphe de U dans U, donc (lemme de Schwarz) on a :
donc
donc
.
On a et
donc
.
Donc
Comme est quelconque on obtient :
,
b conserve les longueurs donc donc
. donc
(1). Or
donc
(2).
Donc de (1) et (2) on tire :
(2).
Choisissons un chemin tel qu’il existe tel que et .
Avec (2) on obtient :
donc
. (3)
c. Reprenons les fonctions et définies plus haut. De (3) on en déduit :
.
En appliquant de nouveau le lemme de Schwarz on obtient que
est une rotation
de centre O.
Donc . Comme
E est un groupe
appartient ŕ E. Donc E est l’ensemble des isométries holomorphes de U.
2. Soit une bijection holomorphe de U dans U.
Alors, avec les fonctions et définies plus haut, la fonction égale ŕ est holomorphe telle que et . Il en est de męme pour . Pour tout de U posons donc . Alors d’aprčs le lemme de Schwarz on a :
mais donc donc
Donc donc
est une rotation
de centre O donc
est dans E donc une isométrie.
Nous allons nous intéresser maintenant aux courbes qui minimisent la distance entre deux
points.
Définition : on appelle géodésique la courbe qui minimise la distance entre deux points d’un
ensemble muni d’une distance.
Dans un espace euclidien les géodésiques sont les droites.
Que se passe-t-il dans U muni de la distance définie par
oů est un
chemin joignant
ŕ ?
Proposition 3.4 : soient
et
deux éléments de U. Il existe une géodésique et une seule joignant
ŕ
et les géodésiques
sont les segments [,
] si
et
sont
alignés avec 0 ou les arcs de cercle orthogonaux au cercle de centre O et de rayon 1, frontičre de
U, sinon.
Démonstration :
1. Soit tel que . Soit le chemin défini par :
L’image de est donc .
On a
Or
2. Soit un chemin quelconque joignant 0 ŕ , .
Posons , et étant les parties réelles et imaginaires de .
donc .
donc et .
Ainsi
Mais a pour image donc donc
Ainsi pour tout chemin
joignant 0 ŕ on a
. Donc le segment
est la géodésique
joignant 0 ŕ .
3. a. Soient deux points de U, et , et soit un chemin joignant ŕ . Déterminons une isométrie telle que et , étant un réel , .
On pose . Alors
implique et
implique . Donc (car ).
Posons Alors et si on pose alors .
Ainsi oů .
Posons
On a
oů est un chemin joignant 0 ŕ . Or . Donc
donc est une
géodésique joignant
ŕ .
3.b. Soit un
chemin joignant
ŕ .
est un chemin
joignant 0 ŕ et
distinct de [0 ; ].
Donc donc seul
est géodésique
joignant
ŕ .
4. Intéressons nous ŕ la nature géométrique de
.
(i) : alors est une rotation et, par une rotation, l’image d’une droite est une droite donc est le segment .
(ii) :
est la composée, dans cet ordre, d’une translation de vecteur d’affixe , , de l’inversion géométrique de centre O et de rapport 1, , d’une réflexion, , d’une similitude, puis d’une autre translation, .
Donc o o o o .
L’inversion transforme une droite qui passe par O en une droite et une droite qui ne passe pas par O en un cercle. Les autres applications transforment une droite en une droite et un cercle en un cercle. Donc est soit un segment, soit un arc de cercle.
est un segment
. Tout dépend donc de la
position de O par rapport ŕ .
a- O, A et B alignés :
est un segment inclus dans l’axe des réels. Donc O, A et B sont alignés si et seulement si A et B sont réels. Donc A doit ętre réel. Donc est réel donc est de la forme oů .
On a donc donc est de la forme oů . Ainsi O, A et B alignés implique que et sont alignés avec 0.
Réciproquement, si 0, et sont alignés, on démontre facilement, d’aprčs la construction de , que est réel donc 0, A et B sont alignés.
O, A et B étant alignés, l’image de [A ; B] est un segment par l’inversion donc par
aussi. Ainsi la
géodésique joignant
ŕ est
le segment
inclus dans un diamčtre de U.
b- O, A et B non alignés :
Alors l’image de [AB] par l’inversion est un arc de cercle, donc par aussi. Etudions la position de cet arc par rapport au cercle C, frontičre de U.
définie sur U, prise en tant que fonction de Mobius, est définie aussi sur C puisque
. Il est facile de
vérifier que . Donc
C est invariant par .
Comme tout diamčtre de C est orthogonal ŕ C l’image de
par
est orthogonale
ŕ donc ŕ
C. Ainsi
est un arc de cercle orthogonal ŕ C.
Conclusion : les géodésiques de U sont soit les diamčtres de C soit les cercles orthogonaux ŕ
C.
Proposition 3.5 : soient et éléments de U. Alors
.
Démonstration : On a
oů est un chemin joignant ŕ . Soit une isométrie. Alors .
Choisissons de maničre que et .
Posons oů et .
Alors on a bien et .
Donc, d’aprčs ce qui a été démontré précédemment,
.
Remarque : plus on se rapproche du bord de U et plus les distances sont longues ŕ parcourir !
Exemple : si
et alors
Proposition 3.6 :
1. L’image d’une géodésique par une isométrie est une géodésique.
2. Soient quatre éléments de U,
tels que et
. Alors il existe une isométrie
de E transformant
en .
Démonstration :
1. Soit un élément de
E. Soit une géodésique, ,
joignant
ŕ .
Posons
et . Soit
la géodésique
joignant et
.
Alors
. Mais . Donc .
donc .
est un
chemin joignant
ŕ .
Donc .
Donc .
Donc et
. Donc
est la géodésique
joignant
ŕ .
2. Soit telle que oů . Alors
et
oů
.
Soit telle que oů . Alors
et
oů
.
On a
donc .
Donc
et donc
et
est
une isométrie d’oů le résultat.
Dans le dessin ci-dessous le disque U est rouge et on a indiqué les géodésiques AB, CD et
BE.
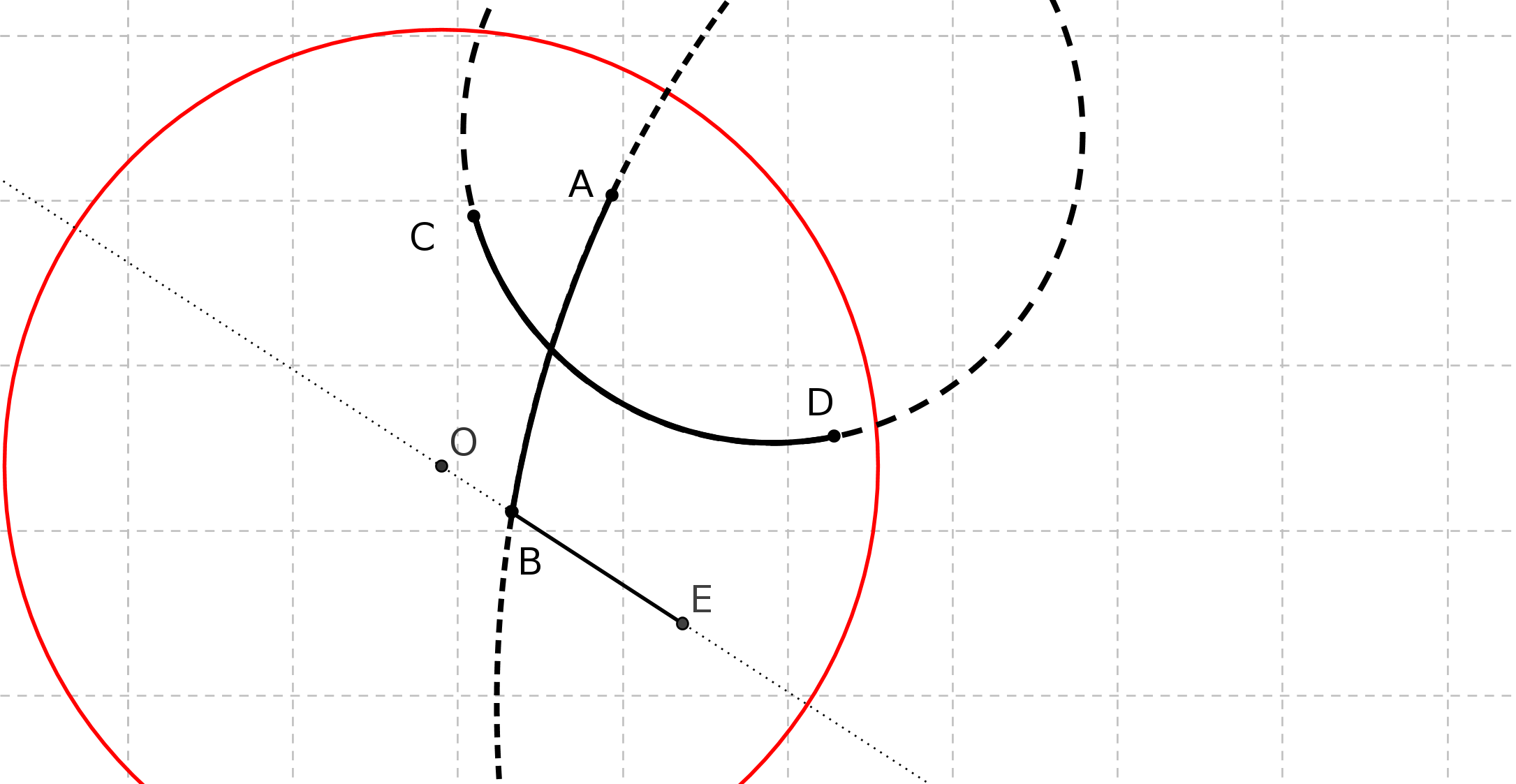
Proposition 3.7 :
1. La topologie du disque de Poincaré est celle induite par celle de la topologie euclidienne du plan complexe sur le disque unité.
2. Le disque de Poincaré est complet.
Démonstration :
1. On note la distance euclidienne dans et la distance dans U.
Soit une suite
de U tendant vers
pour . Donc
tend vers 0.
Donc tend
vers 0. Donc
tend vers 0 par continuité de ln. D’oů 1.
2. Soit une suite de Cauchy
pour de U.
Pour tout ,
est dans U et
qui est un
compact pour .
Donc
admet une sous-suite convergente pour la distance euclidienne,
, vers
.
est une suite de Cauchy pour . Donc elle est bornée pour . Donc il existe tel que pour tout on a : .
Donc ou encore et .
Donc est dans le disque fermé, , qui est inclus dans U. Donc est dans U.
La topologie euclidienne induisant celle du disque de Poincaré, converge vers pour .
Or est de
Cauchy pour donc
elle converge vers .
On va étudier le demi-plan de Poincaré pour faire apparaître un certain nombre de
propriétés, faire le lien avec la géométrie de Lobatchevski, réfléchir ŕ la notion de
parallélisme.
Le demi-plan de Poincaré est l’ensemble des complexes de partie imaginaire strictement positive.
On le note P. On appellera les points de P, points réels et les points de la frontičre,
,
points irréels.
Soit la fonction définie par :
est une bijection holomorphe de P dans U.
Démonstration :
a. Soit . On a :
car . Donc .
b. Soit donc . On a :
si et seulement si .
et car . Donc .
Donc est une
bijection de P dans U et .
c. Pour tout
de P on a . Donc
est holomorphe
dans P. De męme
l’est dans U.
Proposition 4.2 : Soit un chemin dans P joignant deux points et de P. Alors :
étant la partie
imaginaire de .
Démonstration :
est un chemin de U donc
On a :
On a :
donc
Cette proposition nous conduit ŕ poser cette définition :
Définition : on prend comme fonction poids dans P la fonction définie sur P par :
étant
un réel quelconque strictement positif.
Notation : on note et les fonctions poids respectives dans U et P.
On note et les distances respectives dans U et dans P.
On note
et les
longueurs d’un chemin respectivement dans U et dans P.
Proposition 4.3 :
On définit toujours par : .
1. Soient deux points de P, et . On a :
.
2. Les géodésiques de P sont les images des géodésiques de U par
.
Démonstration :
1. On a
étant un chemin joignant ŕ . Mais étant une bijection holomorphe entre P et U, on a :
étant un chemin joignant ŕ . Donc
Ainsi
Puis en utilisant l’expression de , on obtient :
et d’oů
2. Puisque les géodésiques
de P sont les images, par,
des géodésiques de U.
Proposition 4.3 bis :
1. Soient deux points et appartenant ŕ une droite verticale.
On pose et et on suppose . On a alors :
.
2. Soient 4 points , , et situés sur une droite horizontale. On note la distance euclidienne. On a alors :
si et
seulement si .
Démonstration :
1. Soient deux points et appartenant ŕ une droite verticale.
On a alors :
et
. Donc
.
2. Soient les points , , et situés sur une droite horizontale.On pose
, , et . On pose ensuite :
A=, B=, C= et D=. Alors
et .Donc
si
et seulement si (A+B)(C-D)=(A-B)(C+D) ou encore AD=BC.
On a et
.
équivaut ŕ ou encore ŕ
car
ou encore
ŕ .
Donc
équivaut ŕ .
Soit la fonction définie par . C’est une bijection holomorphe définie de - dans -.
Soit la fonction définie par . C’est la bijection holomorphe réciproque de définie de - dans -.
On a
sur P et
sur U.
Soit C le cercle de centre O et de rayon 1 privé du point d’affixe 1. Soit . Alors
La fonction a pour image donc, par , l’image de C privé de 1 est l’axe des abscisses.
est la composée
de translation
définie par
puis de l’inversion géométrique de centre O, puis d’une similitude.
1. Si
est un cercle qui passe par O, alors par l’inversion l’image de ce cercle est une droite donc l’image par
de
est une droite. Comme
conserve l’orthogonalité
et que C et sont
orthogonaux, et
sont orthogonaux.
Donc
est une droite perpendiculaire ŕ l’axe des abscisses.
2. Si est un cercle ne passant pas par O, alors par l’inversion l’image de ce cercle est un cercle donc l’image par de est un cercle. Comme conserve l’orthogonalité et que C et sont orthogonaux, et sont orthogonaux. Donc est un cercle orthogonal ŕ l’axe des abscisses. Donc c’est un cercle dont le centre est sur l’axe des abscisses.
Soit un
diamčtre de C.
1. Si est l’axe des
abscisses alors . Alors
est invariante par
l’inversion donc l’image de
par
est une droite. Par conservation de l’orthogonalité l’image de
est une
droite perpendiculaire ŕ l’axe des abscisses.
2. Si n’est pas l’axe des
abscisses alors l’image de
par
est une droite ne passant pas par O donc, par l’inversion,l’image de
est un cercle.
Donc l’image par
de
est un cercle. Toujours par conservation de l’orthogonalité,
est un
cercle orthogonal ŕ l’axe des abscisses.
Conclusion : Soient deux points,
et
du demi-plan P. Le chemin le plus court les joignant est le segment
si
est
perpendiculaire ŕ l’axe des abscisses, un arc de cercle dont le centre est sur l’axe des abscisse
sinon.
Proposition 4.4 : les réflexions par rapport ŕ une droite verticale sont des isométries de
P.
Démonstration : soit une droite D perpendiculaire ŕ la frontičre de P. Soit la réflexion par rapport ŕ D.
Il est évident que
conserve .
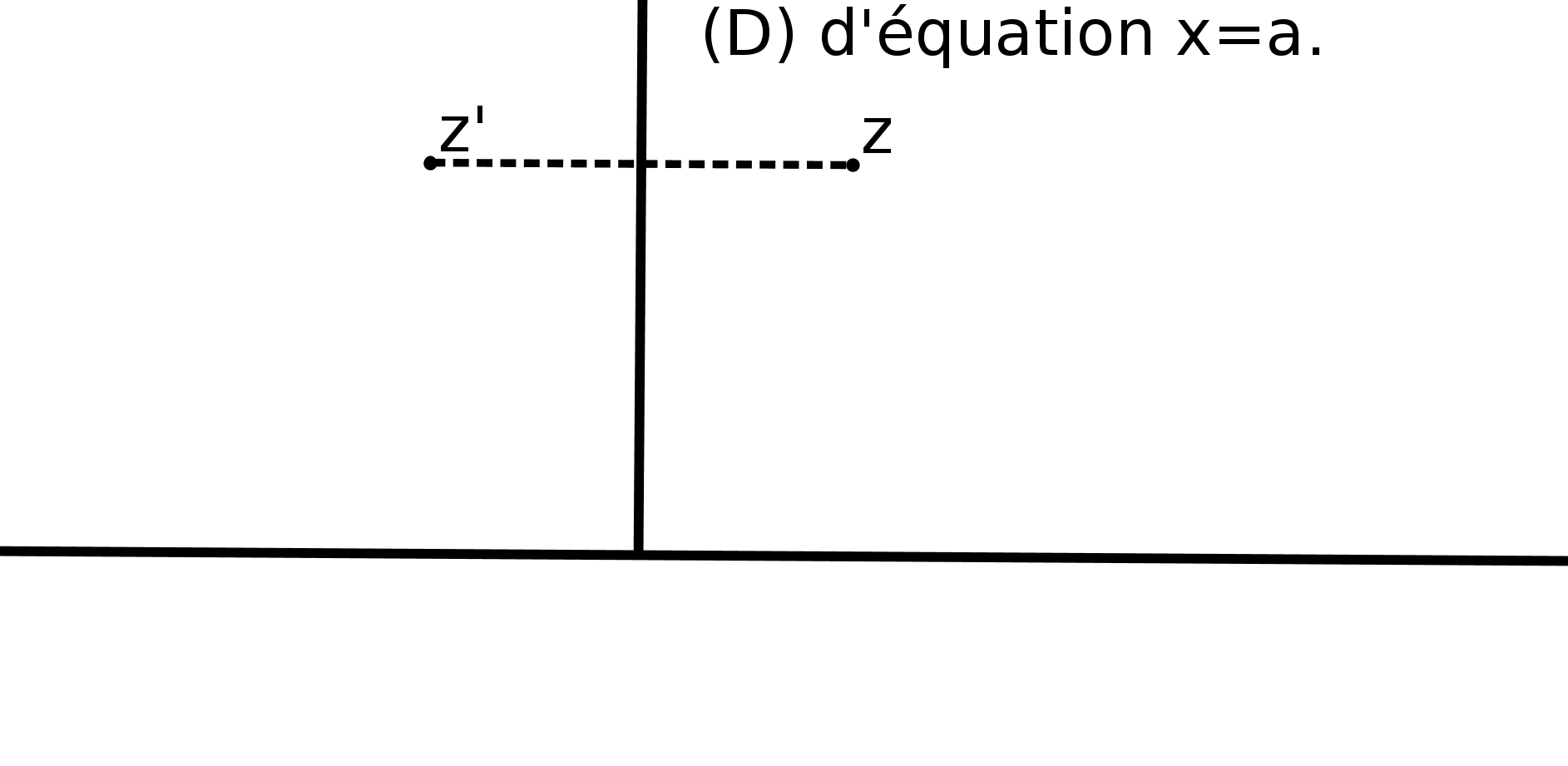
a pour écriture complexe : . Elle correspond ŕ la fonction définie sur par . est différentiable et son jacobien est .
Soit un chemin , . Alors
D’oů le résultat.
Proposition 4.5 : Soit K un cercle dont le centre
est réel et
de rayon .
L’inversion, ,
dans K est une isométrie.
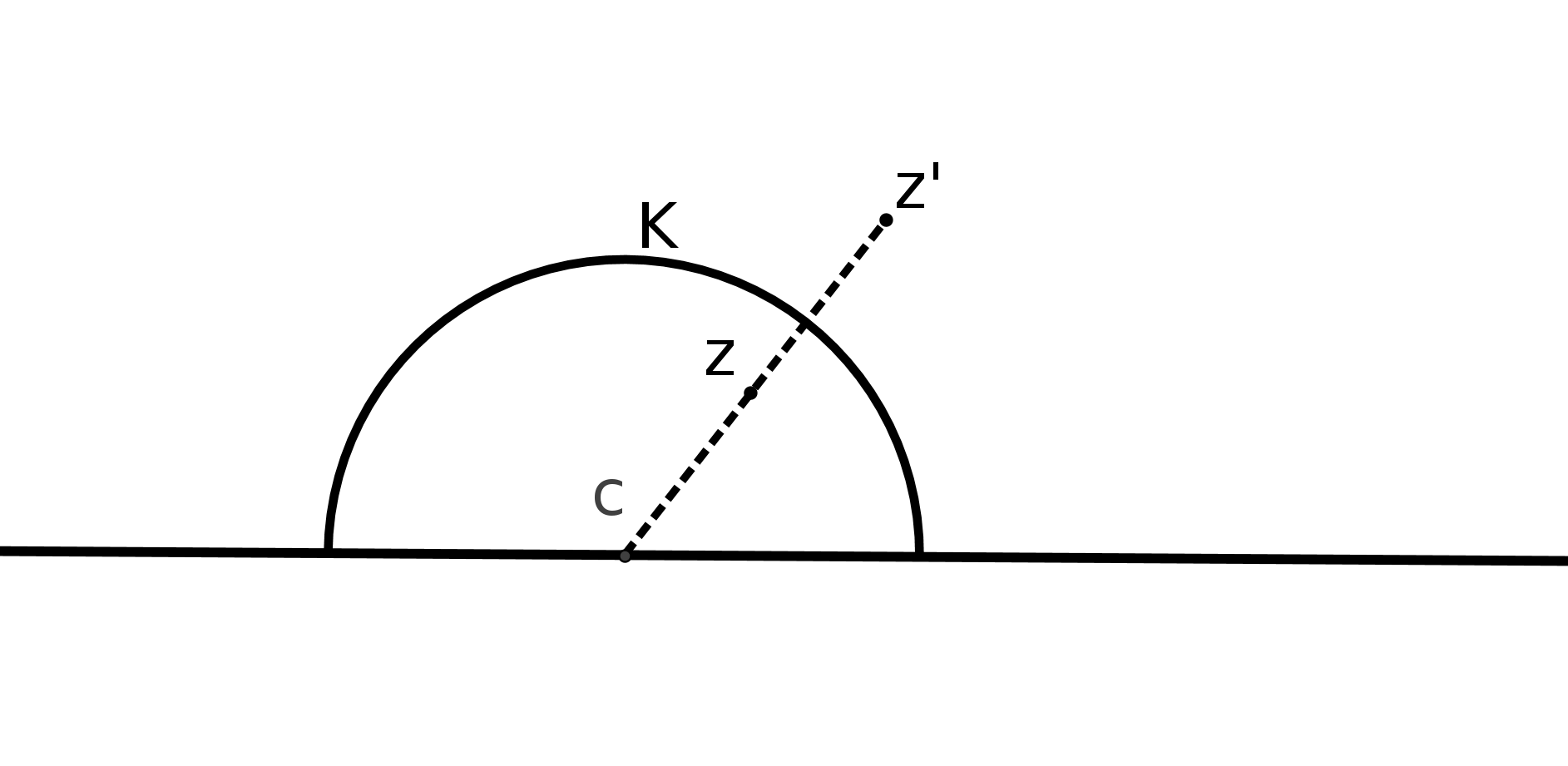
Démonstration : Tout d’abord conserve .
Ensuite, l’écriture complexe de est : ou encore .
Si on pose et alors :
et .
Utilisons les notations suivantes :
1. .
2. la dérivée partielle par rapport ŕ .
3. ,
,
,
.
On trouve :
Donc .
Soit un chemin de P tel que On a :
donc
mais
et
on trouve : . De plus
. Donc
donc
est une isométrie de P.
Remarque : Soient
dans et
la figure suivante :
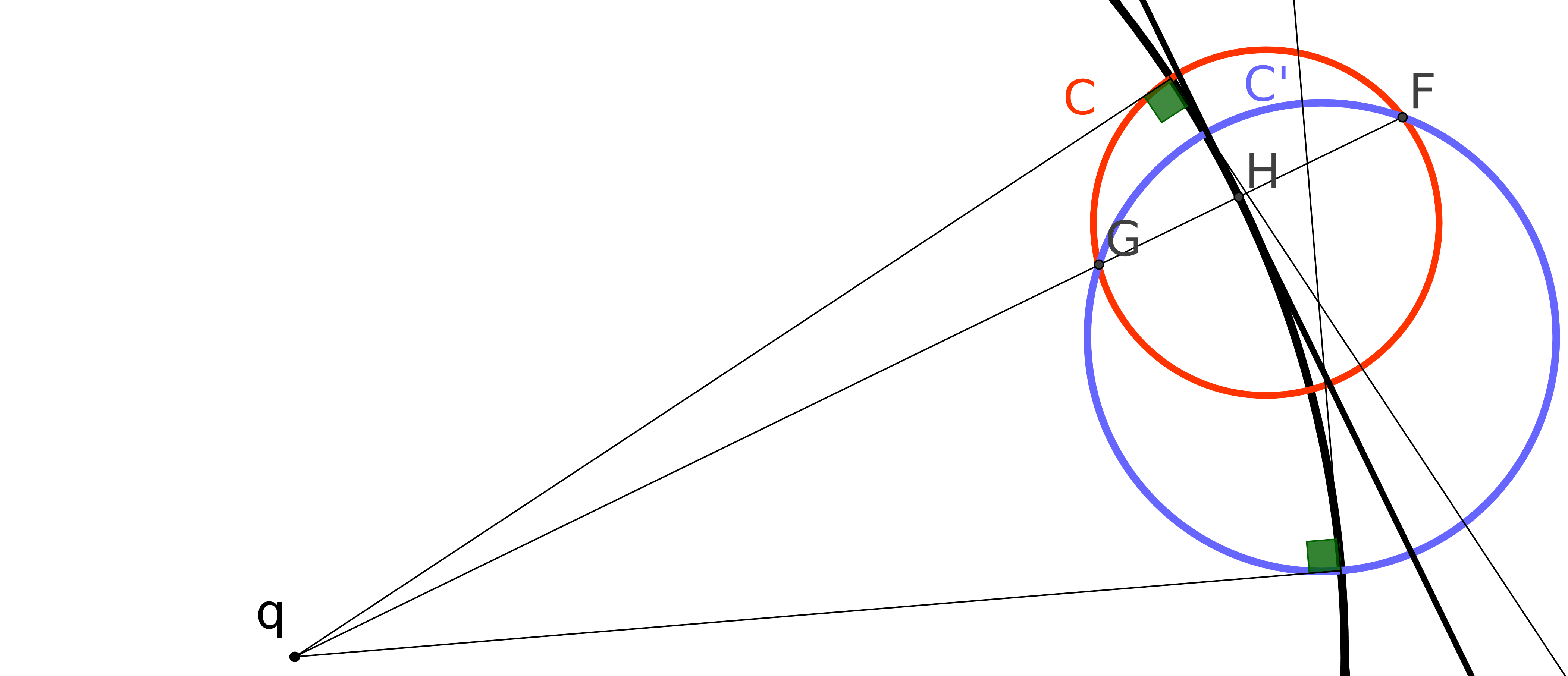
Le cercle K de centre
est orthogonal ŕ C et ŕ C’. K étant invariant par
,
C et C’ sont globalement invariants. Et donc F a pour image G par
. Plus F est proche
de et plus H est
proche du milieu de .
devient
la réflexion par rapport ŕ la tangente ŕ K en H. On peut voir aussi cela algébriquement.
Définition : on appelle réflexion hyperbolique toute réflexion par rapport ŕ une droite
verticale ou toute inversion dont le centre est sur l’axe des réels.
Notation : on note le groupe engendré par les réflexions hyperboliques et le sous-groupe de des transformations conformes.
Proposition 4.6 : Un élément
de appartient ŕ
si et seulement
si a pour écriture
complexe
oů ,
,
et
sont réels
tels que .
Démonstration :
1. une réflexion hyperbolique est une transformation anticonforme donc si et seulement si est la composée d’un nombre pair de réflexions hyperboliques.
Une réflexion, , par rapport ŕ un axe d’équation a pour écriture complexe ou encore . On a : .
Une inversion, , par rapport ŕ un cercle, de centre appartenant ŕ l’axe des réels et de rayon , a pour écriture complexe ou encore . Et on a et .
Ainsi une réflexion hyperbolique a une écriture du type oů , , et sont réels tels que .
Prenons donc deux réflexions et d’écriture complexes respectives et . Alors a pour écriture complexe :
oů
, , et .
On trouve . (Ce
n’est pas un hasard...).
et donc
. Ainsi
la composée d’un nombre pair de réflexions hyperboliques aura une écriture complexe du type
oů
,
,
et
sont des réels
tels que . Donc les
éléments de
sont des transformations de Möbius.
2. Réciproquement soit une transformation de Möbius, , d’écriture complexe oů , , et sont des réels tels que .
est la composée dans
cet ordre de la translation
d’écriture complexe ,
de l’inversion complexe, ,
d’écriture complexe , de la
similitude d’écriture complexe
et de la translation, ,
d’écriture complexe .
et sont
réels donc les translations sont de vecteurs d’affixes réelles donc sont les composées de
deux réflexions par rapport ŕ des droites verticales, donc elles sont des éléments de
.
donc la similitude
d’écriture complexe
est une homothétie de centre O et de rapport positif donc c’est la composée de deux inversions,
et
,
et
étant deux cercles de
centres O et de rayon
et tels que
. Donc cette
similitude est dans .
est la
composée de la réflexion par rapport ŕ l’axe des imaginaires et de l’inversion dans le cercle de centre O et de
rayon 1. Donc
est dans .
Ainsi est la composée
de transformations de
donc est dans .
Et si avec , en divisant par on obtient avec .
Proposition 4.7 :
est le groupe
des isométries, ,
de P.
Démonstration :
1. tout élément de
est une isométrie puisque les réflexions hyperboliques le sont. Donc
.
2. Soit une isométrie. Soient un point de P et une géodésique-droite passant par .
a. Si on prend la réflexion, , par rapport ŕ la médiatrice de et on considčre . Alors est une isométrie et . On pose .
Si on pose oů est l’identité de P.
On a donc .
b. étant une isométrie est une géodésique, , passant par .
1. Si est un cercle, soit un des points d’interchapter de avec l’axe des réels et on prend l’inversion, , dans le cercle de centre et de rayon . Alors l’isométrie transforme en en la géodésique-droite passant par , donc en elle męme, puisqu’il n’existe qu’une seule droite perpendiculaire passant par et perpendiculaire ŕ l’axe des réels.
Ainsi .
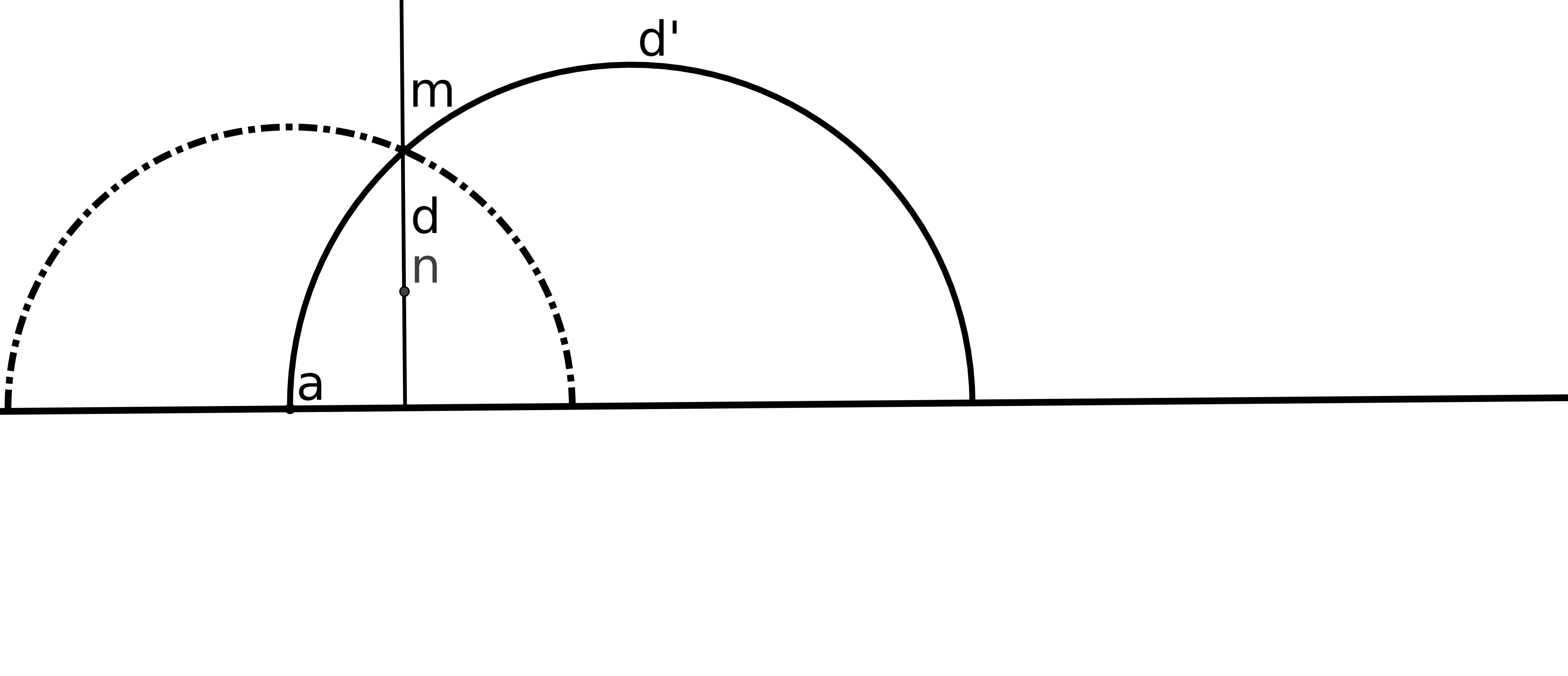
Posons . Alors fixe et conserve .
2. Si est une droite on pose .
Donc dans tous les cas
fixe et
conserve .
c. Soit . fixe et est une isométrie donc .
conserve donc . Soient , et les parties imaginaires respectives de , et .
, et étant sur une droite verticale, on a vu en 4.1 que :
et . Donc
équivaut
ŕ . Donc
. Donc
fixe tout
point de .
d. Soient deux points
et de P et soit
un chemin, ,
joignant et
.
est continue donc
l’image du chemin
est un chemin, ,
joignant
ŕ et
coupe
si et seulement
si coupe
. Donc soit
conserve les demi-plans
définis par soit les échange.
Si les échange il suffit de
composer la réflexion d’axe
par . Donc on peut
supposer que conserve les
demi-plans définis par .
Ainsi fixe chaque
point de et conserve les
demi-plans définis par .
Montrons alors que
est l’identité.
e. Soient un point de P et un point de . Alors :
donc, si on fixe , on a :
Pour tout , . Donc, en posant ,
donc
donc
donc
donc
On obtient ainsi l’égalité de deux polynômes de degré 4 en . Leurs coefficients sont égaux, en particulier, ceux de degré 3 :
donc
donc, comme la partie imaginaire de est non nulle, donc donc et ont la męme partie imaginaire. Donc et sont sur une droite horizontale.
Prenons sur cette droite.
Alors, d’aprčs P.4.3 bis,
implique que .
Et comme et
sont du męme
côté de ,
on a .
Donc est l’identité. Donc , étant la composée d’éléments de , appartient ŕ .
Conclusion : une isométrie de P, de P est de la forme : -si elle est conforme, oů , , et sont réels tels que .
-si elle est anticonforme, oů , , et sont réels tels que .
Définition : soient deux géodésiques S et S’ se coupant en un point A. Soient les tangentes en
A ŕ ces courbes. L’angle aigu formé par ces tangentes est appelé angle de S et S’. Si le plan est
orienté on obtient un angle orienté.
Proposition 5.1 : Soient deux géodésiques (C) et (C’). Il existe une isométrie transformant
(C’) en (C).
Démonstration :
1. Si (C) et (C’) sont des droites coupant la frontičre
de P en A et A’, alors la réflexion d’axe la médiatrice de [AA’] transforme (C’) en
(C).
2. Si (C) ou (C’) est une droite, par exemple (C). On suppose que (C) coupe
en A et que
(C’) coupe
en B et C.
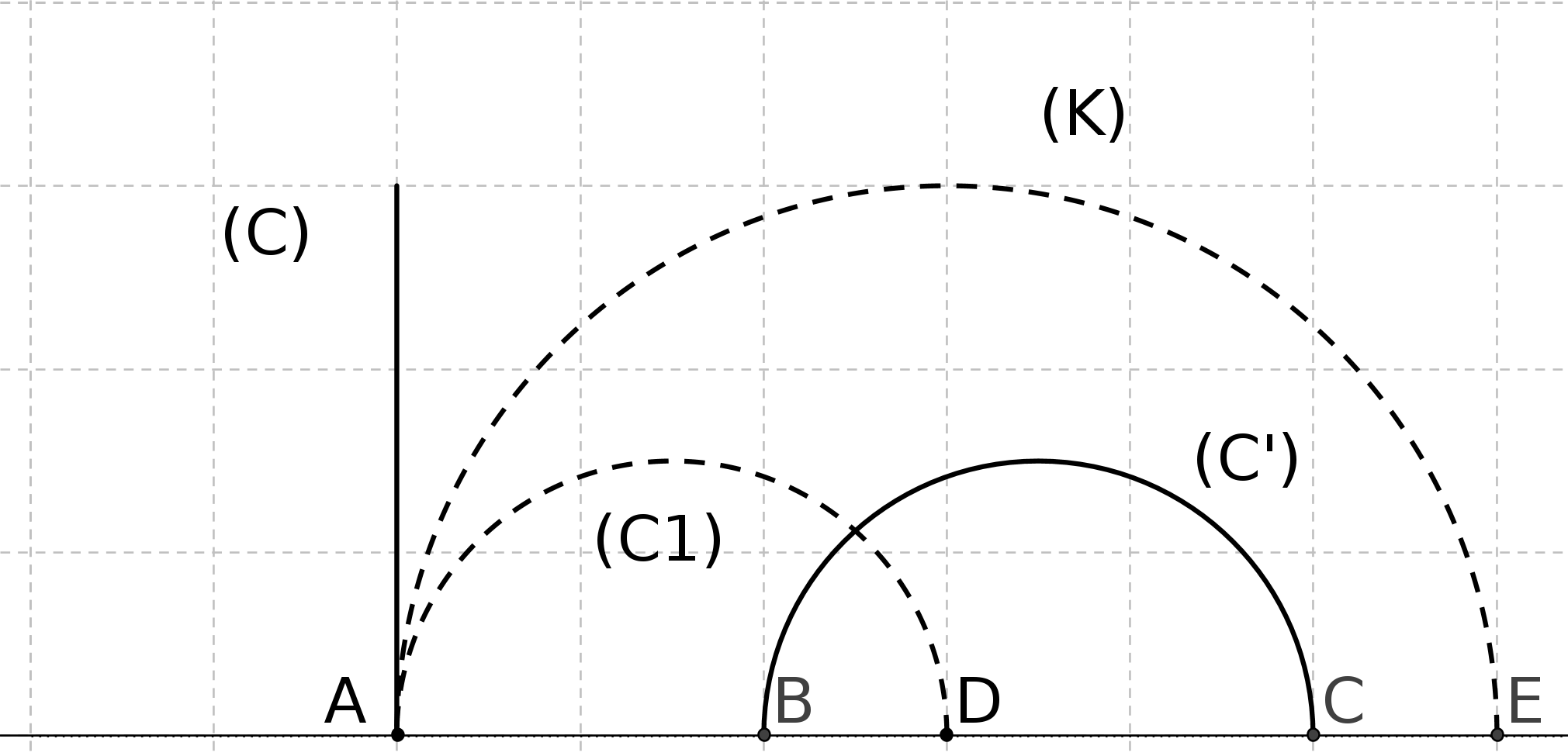
Soit la
translation de vecteur BA et soit I l’inversion par rapport au cercle K de centre D. Alors
transforme (C’) en (C).
3. Si (C) et (C’) sont des cercles.
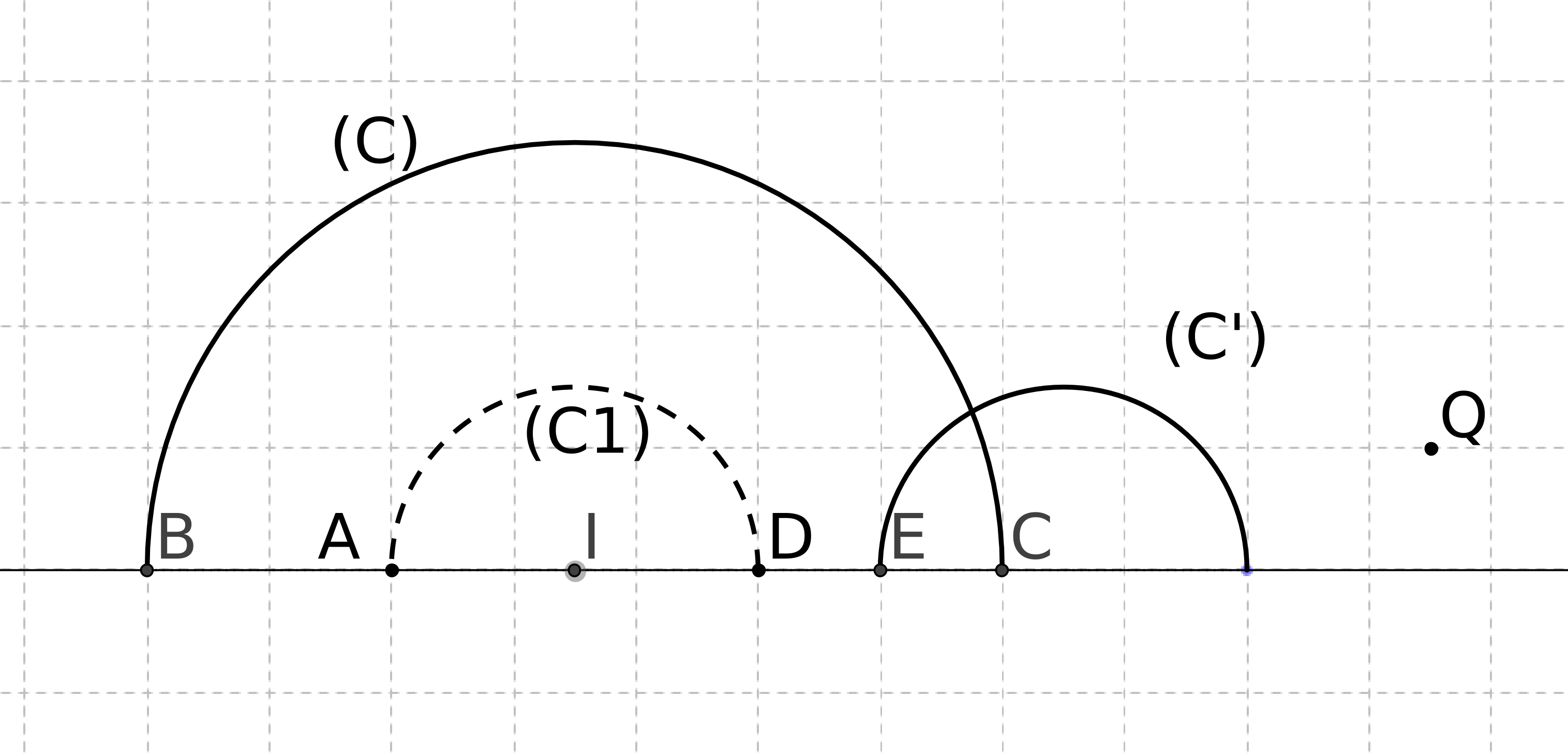
Soit la
translation qui transforme (C’) en (C1) de maničre que (C) et (C1) soient concentriques et soit
l’homothétie qui transforme
(C1) en (C). Alors
transforme (C’) en (C).
Définition : un polygone est une suite de points , tels que, pour tout , et sont joints par une géodésique ainsi que et .
Proposition 5.2 : la somme des angles d’un triangle est strictement inférieure ŕ
.
Démonstration :
Cas 1 : On considčre un triangle ABC tel que est vertical, est perpendiculaire ŕ . De sorte que l’arc de cercle est de centre O et l’arc de cercle est de centre . On peut noter que les angles "rouge" sur la figure, ayant leurs côtés respectifs perpendiculaires sont égaux.
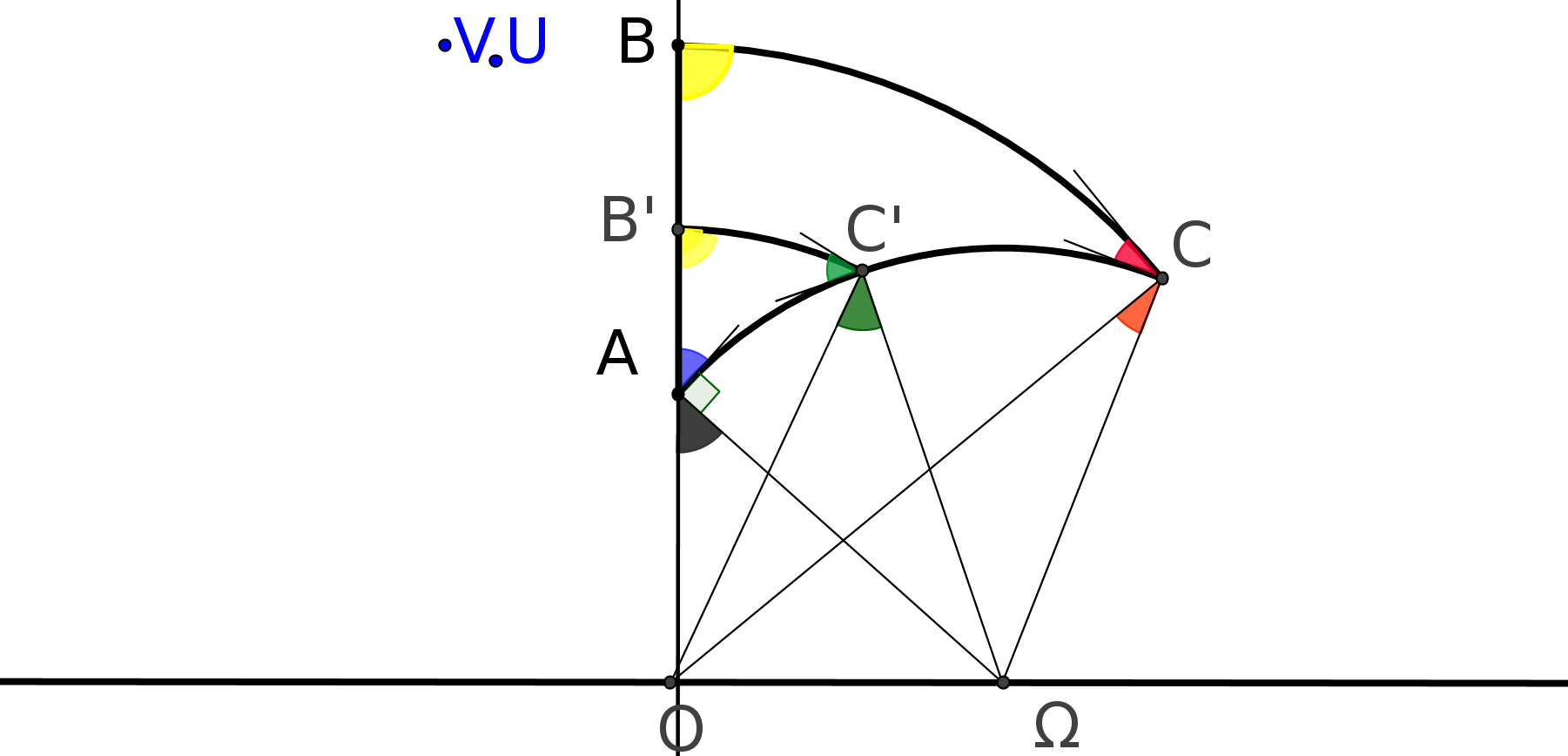
Soient un point de l’arc et l’arc de centre O et de rayon qui coupe en . Alors les angles "jaune", ainsi que les angles "vert", sont égaux, pour la męme raison que les "rouge".
On a : et .
Donc .
Ainsi, l’angle étant plus petit que , l’angle est plus petit que .
Donc, si tend vers A, l’angle du triangle croît et a pour limite l’angle qui est égal ŕ . Donc .
Donc la somme des angles dans un triangle rectangle est inférieure ŕ
.
Cas 2 : On considčre un triangle ABC tel que
est vertical. On
suppose que l’angle
n’est pas droit. Donc les angles A et B est soit aigus soit obtus.
a. Supposons qu’ils soient aigus :
Existence d’un tel triangle :
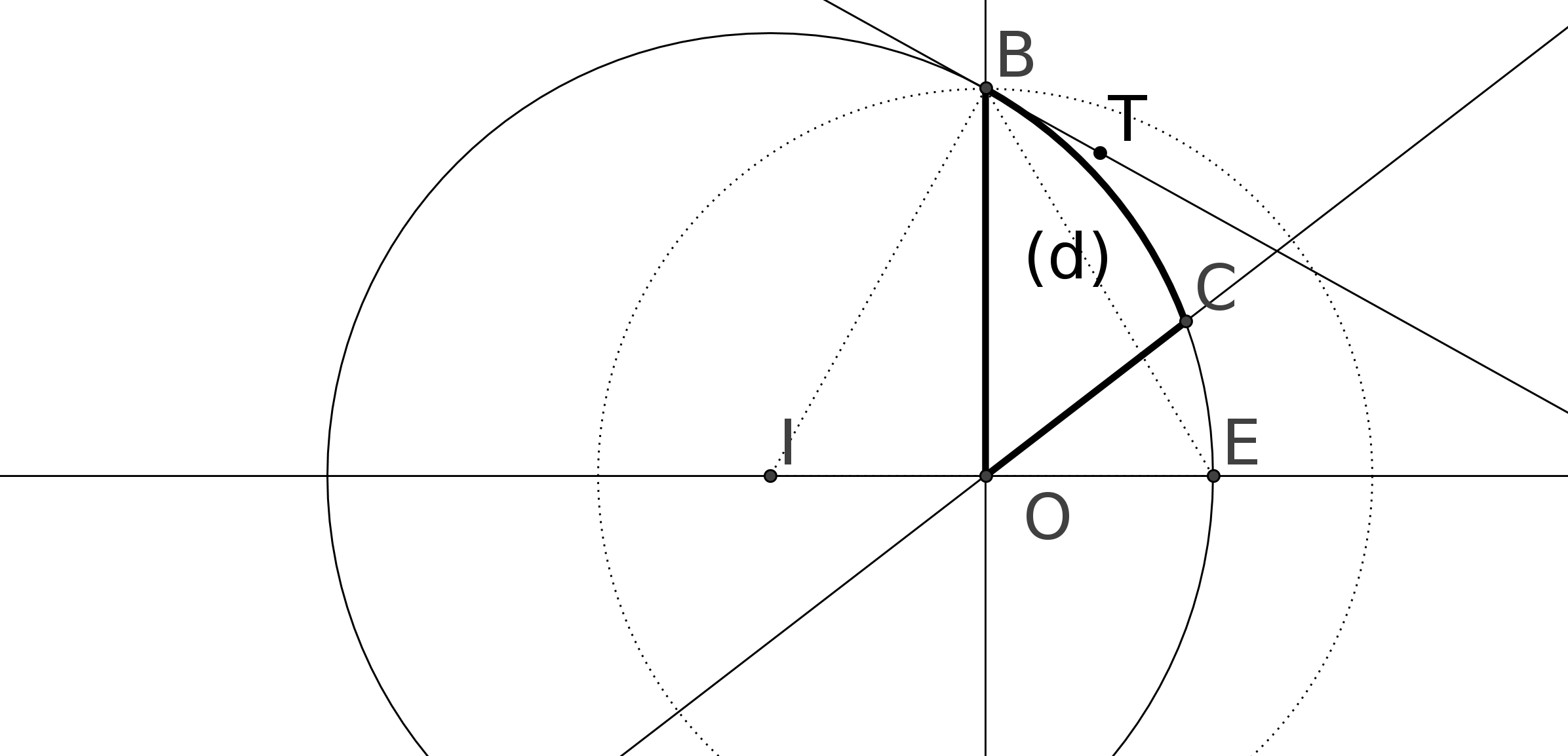
Soit une droite perpendiculaire ŕ l’axe des réels et le coupant en O. Soit B un point de P sur (d). Soit T le point tel que ou . Puis on trace le cercle de centre I, I étant sur l’axe des réels et tel que BT tangente ŕ . étant aigu, I et T sont de part et d’autre de (d). Soit tel que T et C sont du męme côté de (d). On démontre alors que .
En effet le triangle IBE est isocčle en I et donc l’angle OEB est plus grand que l’angle EBO, donc il
en est de męme de OB par rapport ŕ OE. Donc C est ŕ l’intérieur du cercle de centre O et de rayon
OB. Ainsi
.
Soit A un point de
tel que .
On trace la géodésique de centre D joignant A ŕ C.
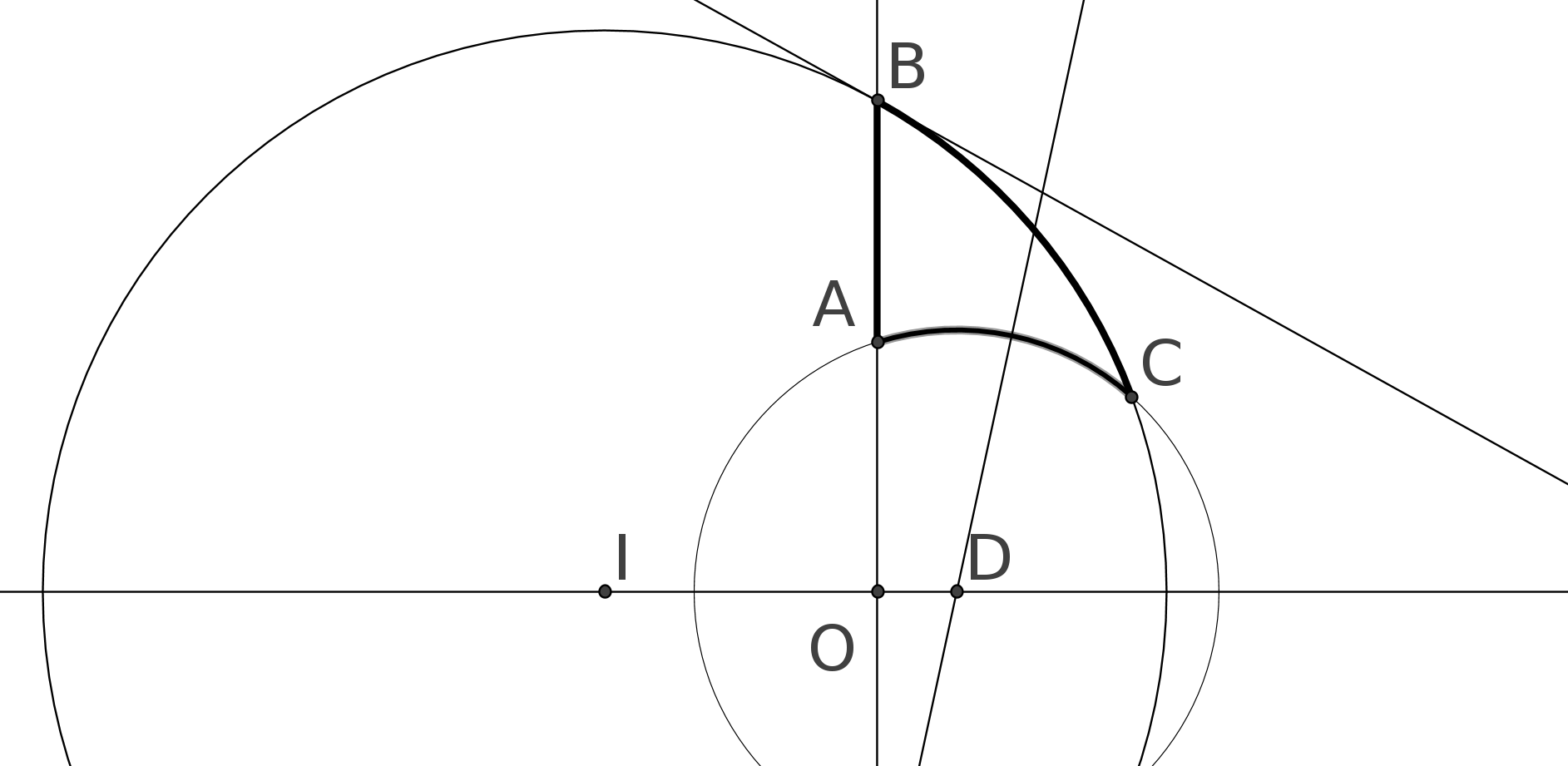
Si l’angle A du triangle ABC était obtus, D et I seraient du męme côté de (d) et on aurait
Ce qui
n’est pas possible. Donc l’angle A est aigu. Donc il existe des triangles ABC avec deux angles
aigus.
Démontrons que la somme des angles est inférieure ŕ .
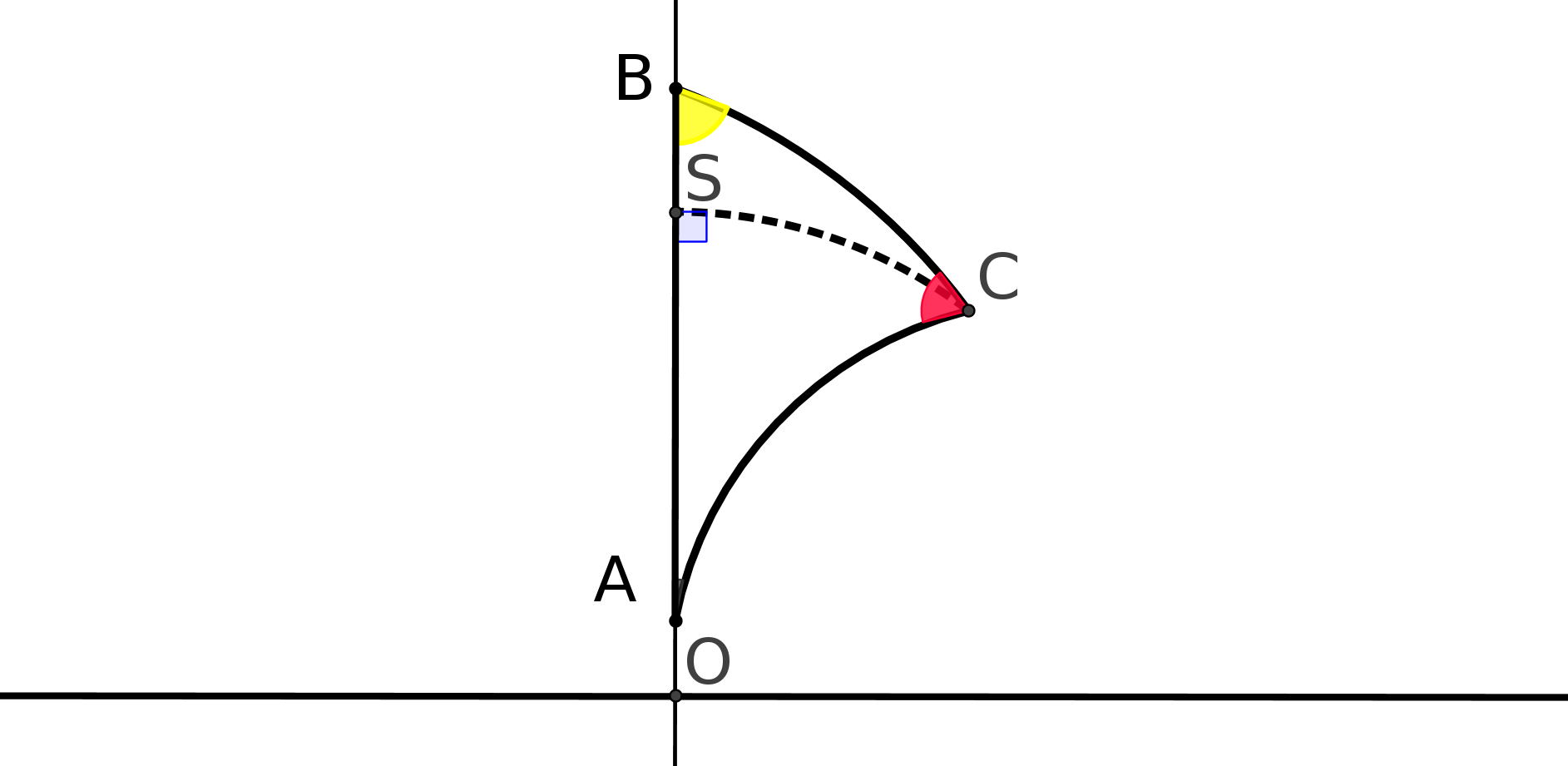
Traçons le cercle de centre O et de rayon .
Il coupe en un
point S. En effet .
Les deux triangles BCS et ACS sont rectangles donc la somme de leurs angles est inférieure ŕ
.
On en déduit facilement que la somme des angles de ABC est inférieure ŕ
.
b. Supposons que l’un au moins des angles A ou B soit obtus :
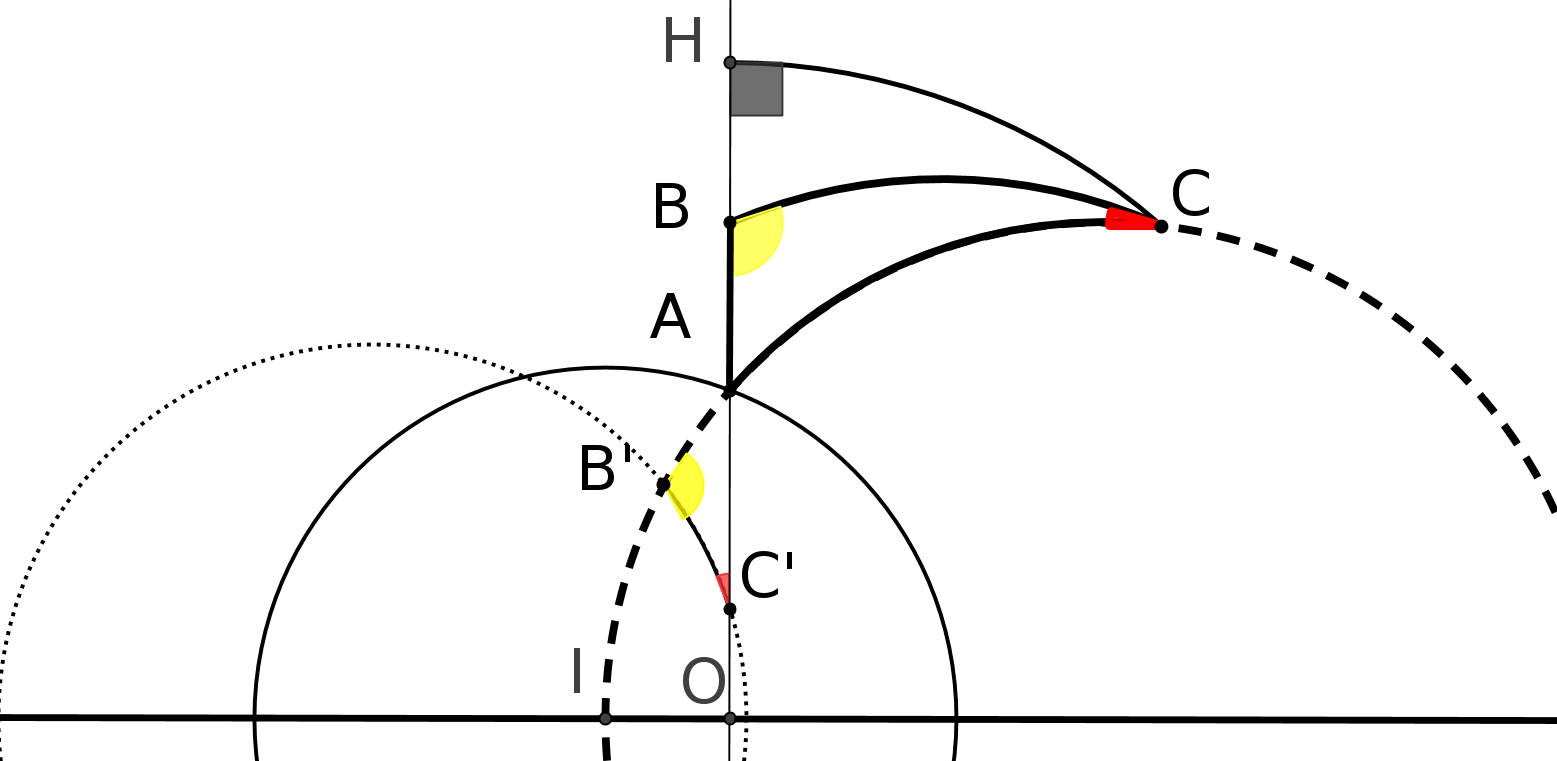
Supposons que ce soit B. Alors .
Donc, si on trace la géodésique CH orthogonale ŕ (AB),
et le triangle AHC est rectangle en H. La somme de ses angles est inférieure ŕ
donc
l’angle A est aigu.
Ramenons nous au cas oů les angles A et B sont aigus. Soit I le point interchapter de la
géodésique AC et de l’axe des réels tel que C et I sont de part et d’autre de (d). l’inversion dans le
cercle de centre I et de rayon IA transforme (AB) en la géodésique passant par A et C et
inversement. De sorte que le triangle ABC est transformé en un triangle AB’C’ dans lequel les
angles A et C’ sont aigus. Donc, d’aprčs a., la somme de ses angles est plus petite que
. Comme
l’inversion considérée est une isométrie hyperbolique, la somme des angles du triangle ABC est aussi plus
petite que .
Proposition 5.3 : la somme des angles d’un polygone de
sommets est
plus petite que .
Démonstration : il suffit de faire une récurrence, en remarquant que rajouter un sommet revient
ŕ rajouter un triangle.
Remarques : on peut retrouver le quadrilatčre de Sacchéri qui possčde deux angles droits deux côtés de męme longueur et deux angles aigus.
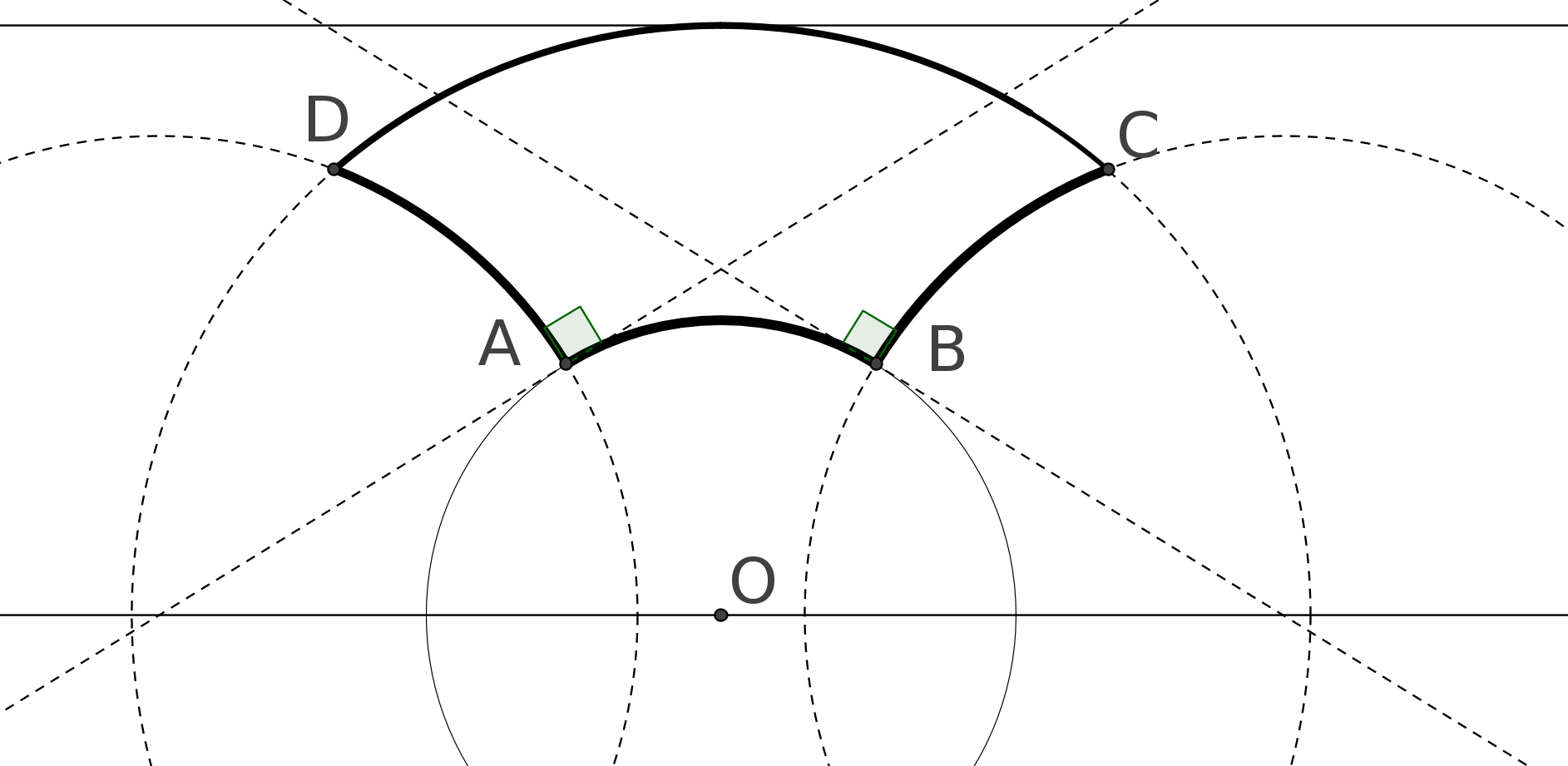
Définition : deux triangles congruents sont des triangles isométriques.
Proposition 5.4 : deux triangles sont congruents si et seulement si ils ont leurs angles
égaux deux ŕ deux. Ainsi il n’existe pas de triangles semblables autres que les triangles
congruents.
Démonstration :
1 Il est évident que si deux triangles sont congruents alors leurs angles sont égaux deux ŕ
deux.
2. Soient deux triangles ABC et A’B’C’ ayant des angles égaux.
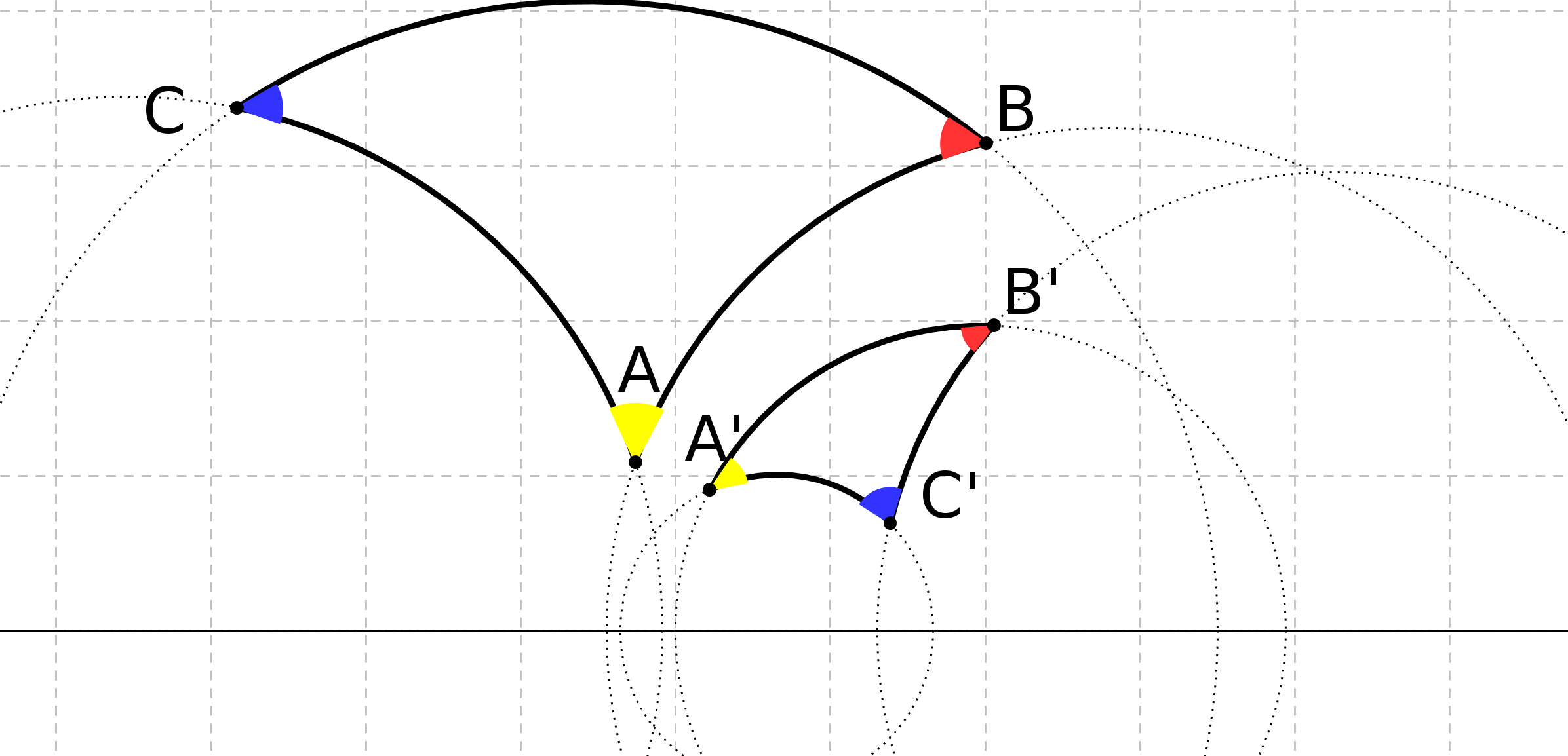
. Existence d’une
isométrie, , transformant la
géodésique, , passant par
A’ et B’ en la géodésique, ,
passant par A et B, transformant la géodésique,
passant par A’ et C’ en la
géodésique, , passant
par A et C telle que .
.Déterminons d’abord une isométrie transformant en et A’ en A.
Par une translation, ,
on peut transformer A’ en A" de maničre que A et A" soient sur la męme verticale ; puis par l’
homothétie, ,
de centre réel qui transforme A" en A on aura transformé la géodésique,
, passant par A’ et B’
en une géodésique, ,
passant par A.
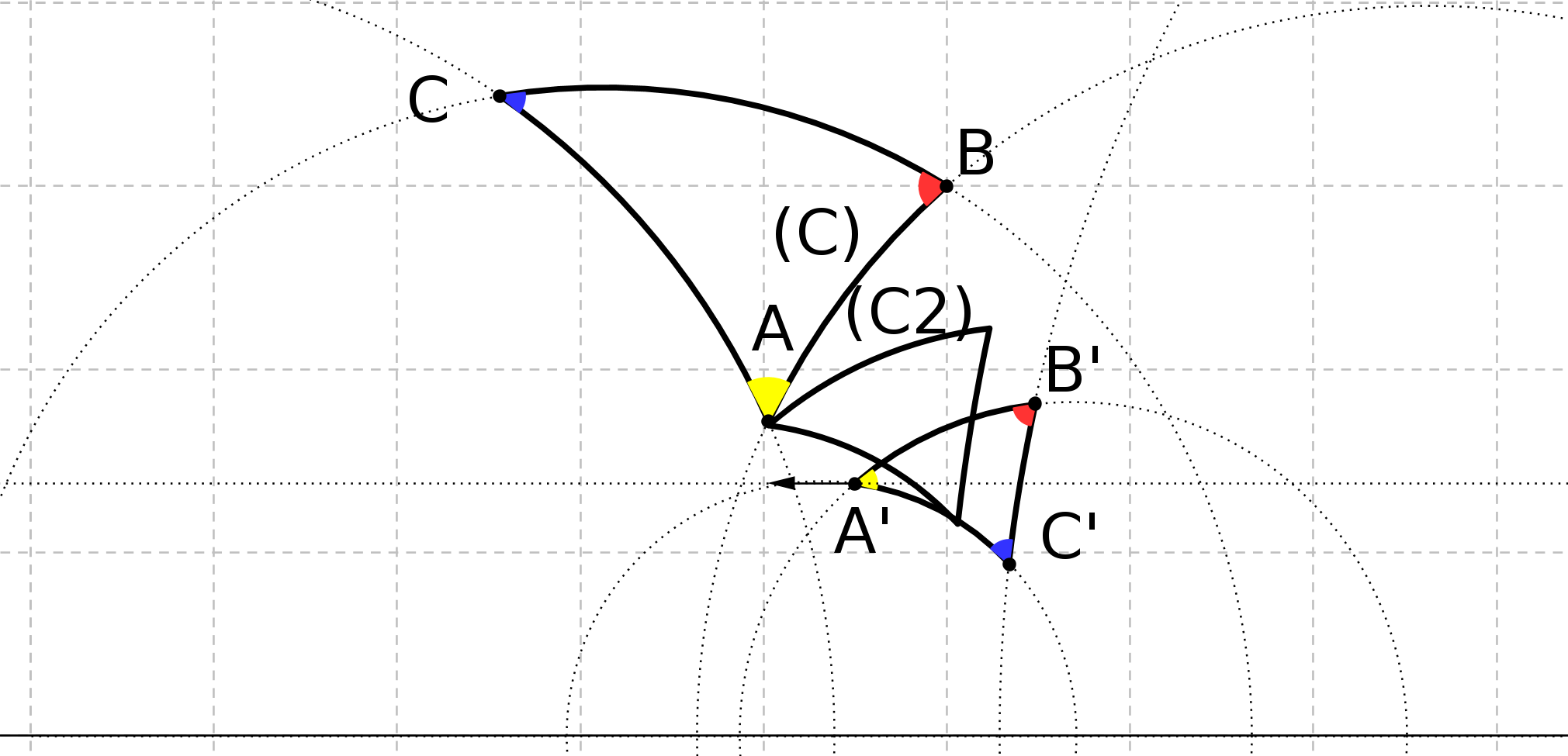
Cas 1 : Si et sont des droites verticales, ayant un point commun, elles sont alors confondues et l’isométrie répondant ŕ la question est .
Cas 2 :Si ou
est une droite,
par exemple ,
on se trouve dans la figure suivante :
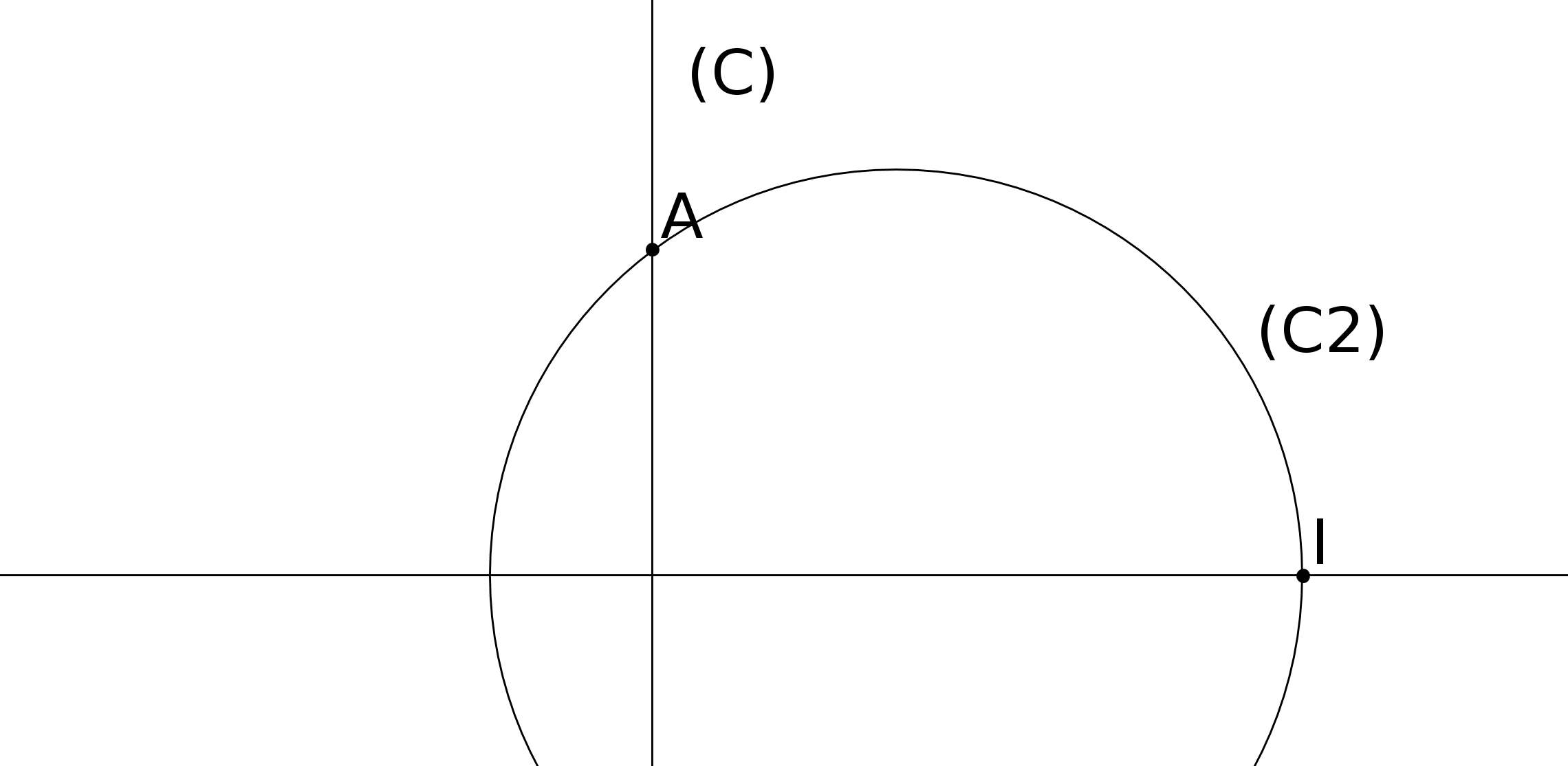
Alors l’inversion, , dans
le cercle, , de centre I et
de rayon IA transforme
en . Donc l’isométrie
cherchée est
la composée .
Cas 3 : Si et sont des cercles alors :
si c’est terminé, l’isométrie cherchée est .
si
on se trouve dans la situation suivante :
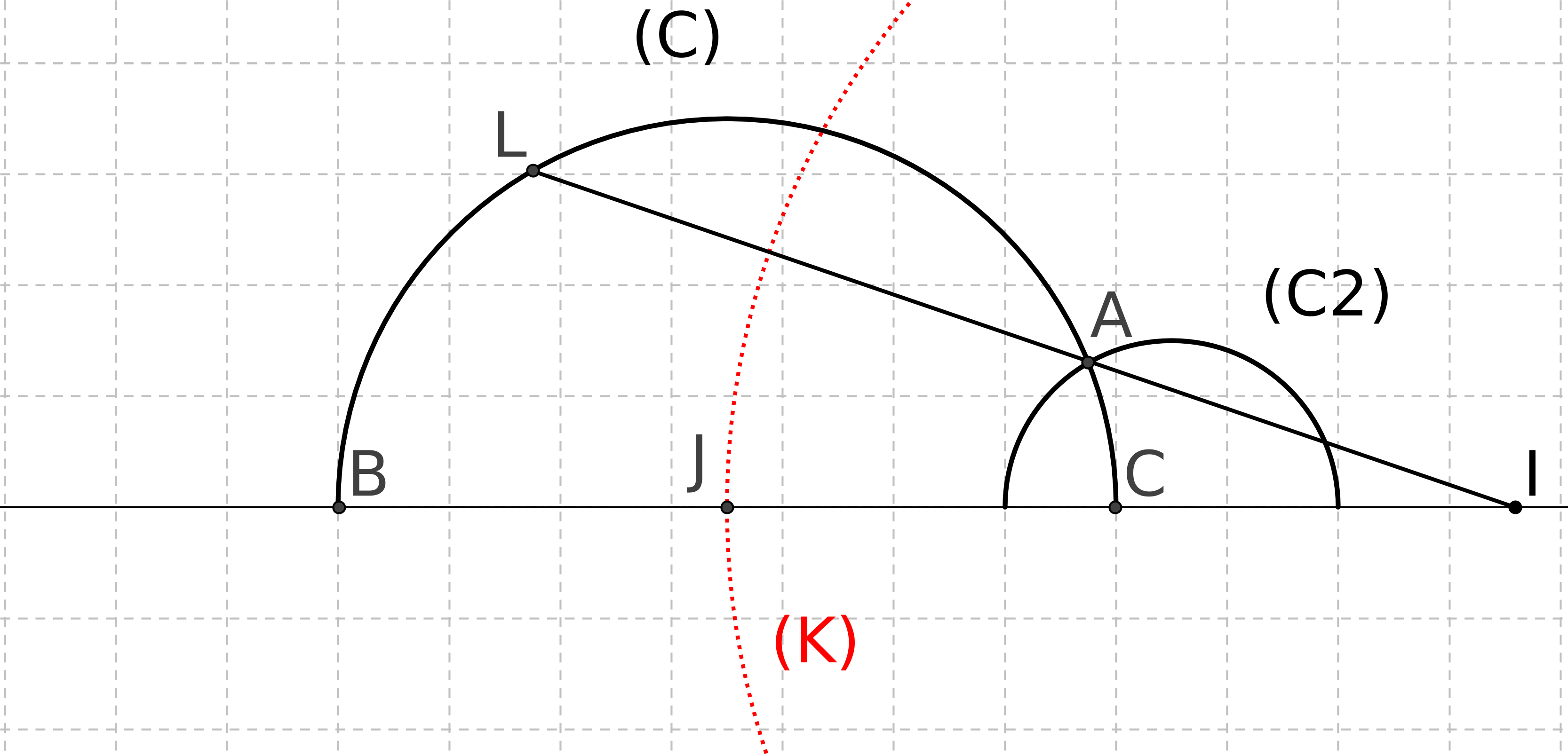
D’aprčs P.5.1, il existe une isométrie transformant (C2) en (C). Mais elle transforme A en un point L de (C)
* Si A et L sont sur une męme horizontale prenons la réflexion d’axe la médiatrice de [AL]. Alors transforme (C2) en (C) et fixe A donc on prendra .
** Si A et L ne sont pas sur une męme horizontale, la droite AL coupe
en I. Appelons
J le centre de (C) et (K) le cercle de centre I et de rayon IJ. Alors (C) et (K) sont orthogonaux. Soit
l’inversion par rapport ŕ (K).
Alors transforme (C2) en (C)
et fixe A donc on prendra .
. Ainsi il existe une isométrie transformant en telle que A’ a pour image A.
Alors, par , la géodésique , celle qui passe par A’ et C’, a pour image une géodésique, , passant par A. Supposons que et fasse un angle orienté égal ŕ . Alors, par hypothčse sur les triangles hyperboliques ABC et A’B’C’, et font un angle orienté égal ŕ ou . Supposons que ce soit .
a. Si est une isométrie conforme alors fera avec un angle orienté égal ŕ . Donc . En effet il n’existe qu’une géodésique faisant un angle orienté donné avec une autre géodésique.
b. Si est une isométrie
anticonforme alors
fera avec un angle
orienté égal ŕ .
Nous serons dans la situation suivante :
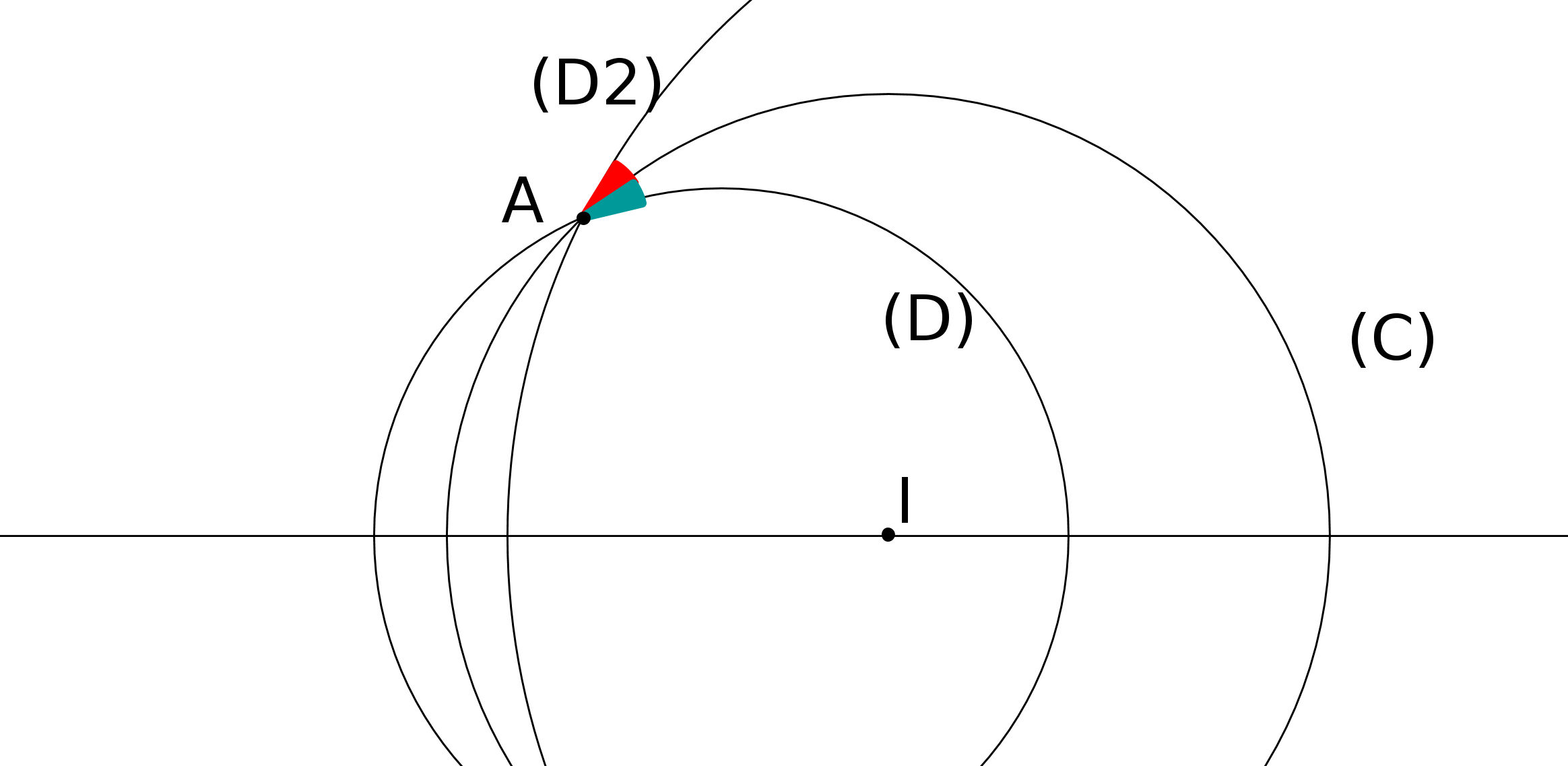
Prenons , l’inversion
dans le cercle (C). Alors
a pour image la géodésique passant par A et faisant un angle égal ŕ
puisque
est anticonforme.
Donc .
Ainsi il existe une isométrie, ,
transformant la géodésique, , passant
par A’ et B’ en la géodésique, ,
passant par A et B, transformant la géodésique,
passant par A’ et C’ en la
géodésique, , passant
par A et C telle que .
2. Montrons que les triangles ABC et A’B’C’ sont congruents
Appelons AB’C’ l’image de A’B’C’ par .
a. Si B=B’ ou C=C’ alors B=B’ et C=C’ puisque ABC et A’B’C’ ont les męmes
angles.
b. Si et
alors
les deux figures suivantes sont possibles :
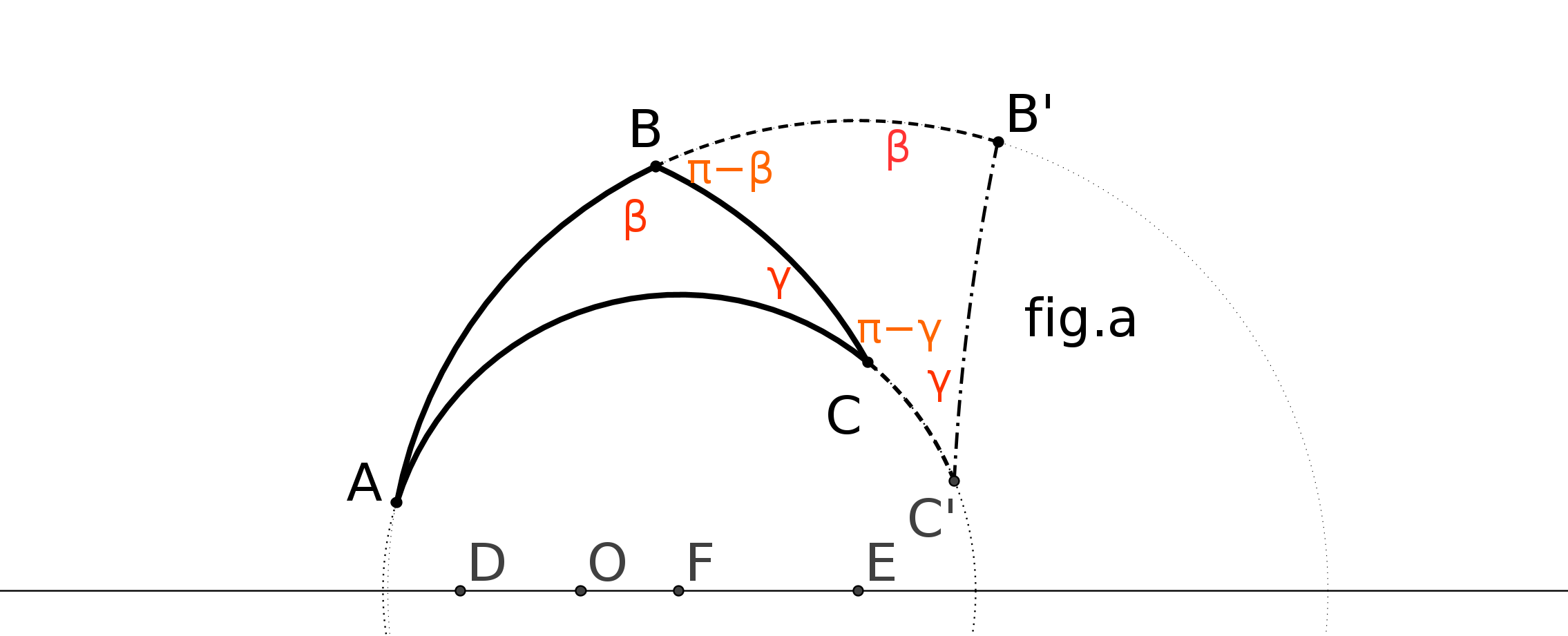
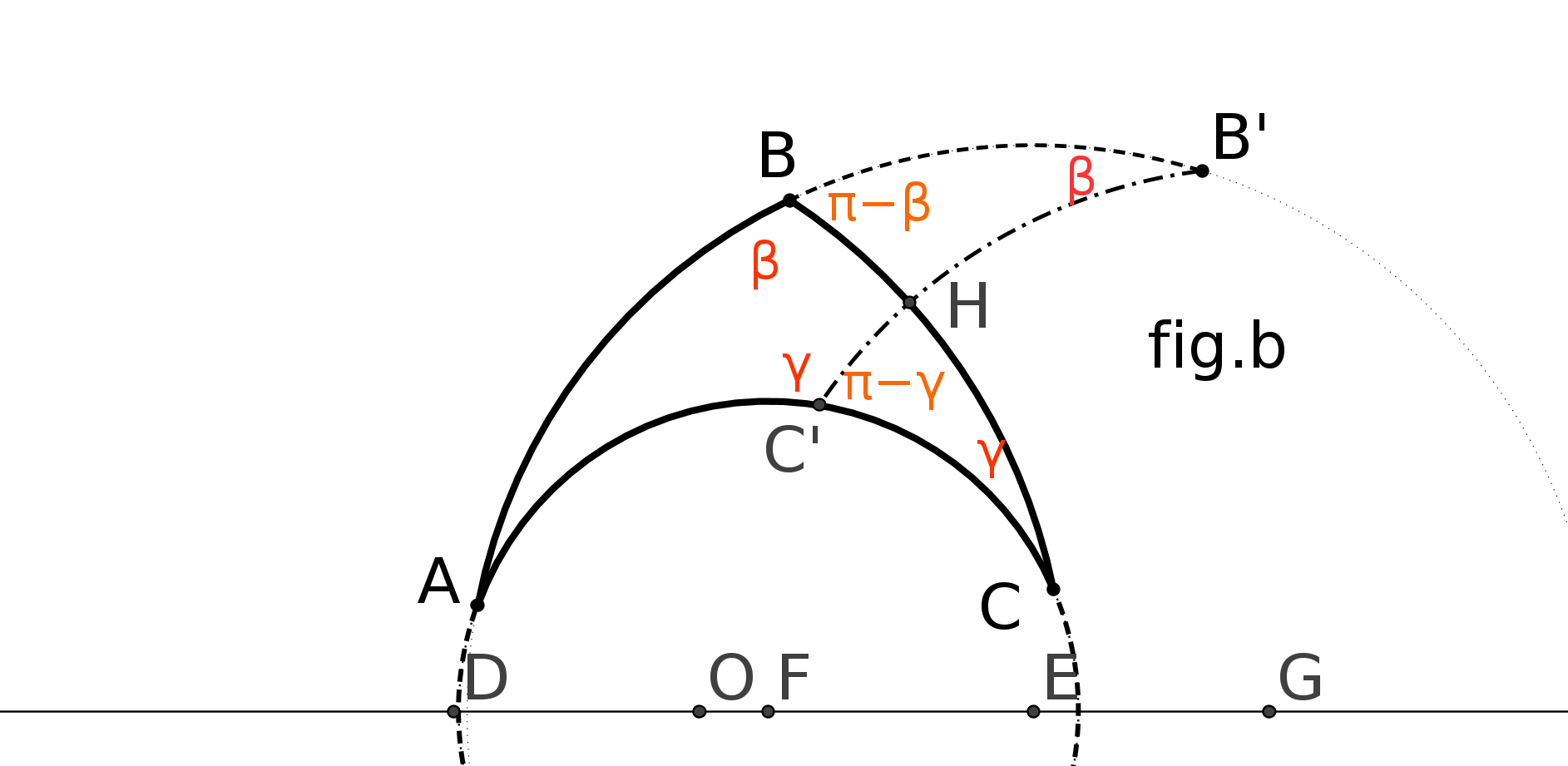
Dans la figure a. la somme des angles du quadrilatčre BB’C’C est égale ŕ ce qui est impossible. Donc la figure a. est impossible.
Dans la figure b. la somme des angles du triangle BHB’ est égale ŕ au moins ce qui est impossible. Donc la figure b. est aussi impossible.
Donc si deux triangles ont les męmes angles ils sont congruents.
Soient deux points et de P. On a :
. On démontre que si tend vers 0.
Ceci nous conduit ŕ poser la définition suivante :
Définition de l’aire : soit un domaine C. On définit son aire par :
Pour calculer l’aire d’un triangle nous procčderons en trois étapes.
On appelle triangle idéal un triangle dont les trois sommets sont sur l’axe des réels et dont les
côtés sont des géodésiques infinies.
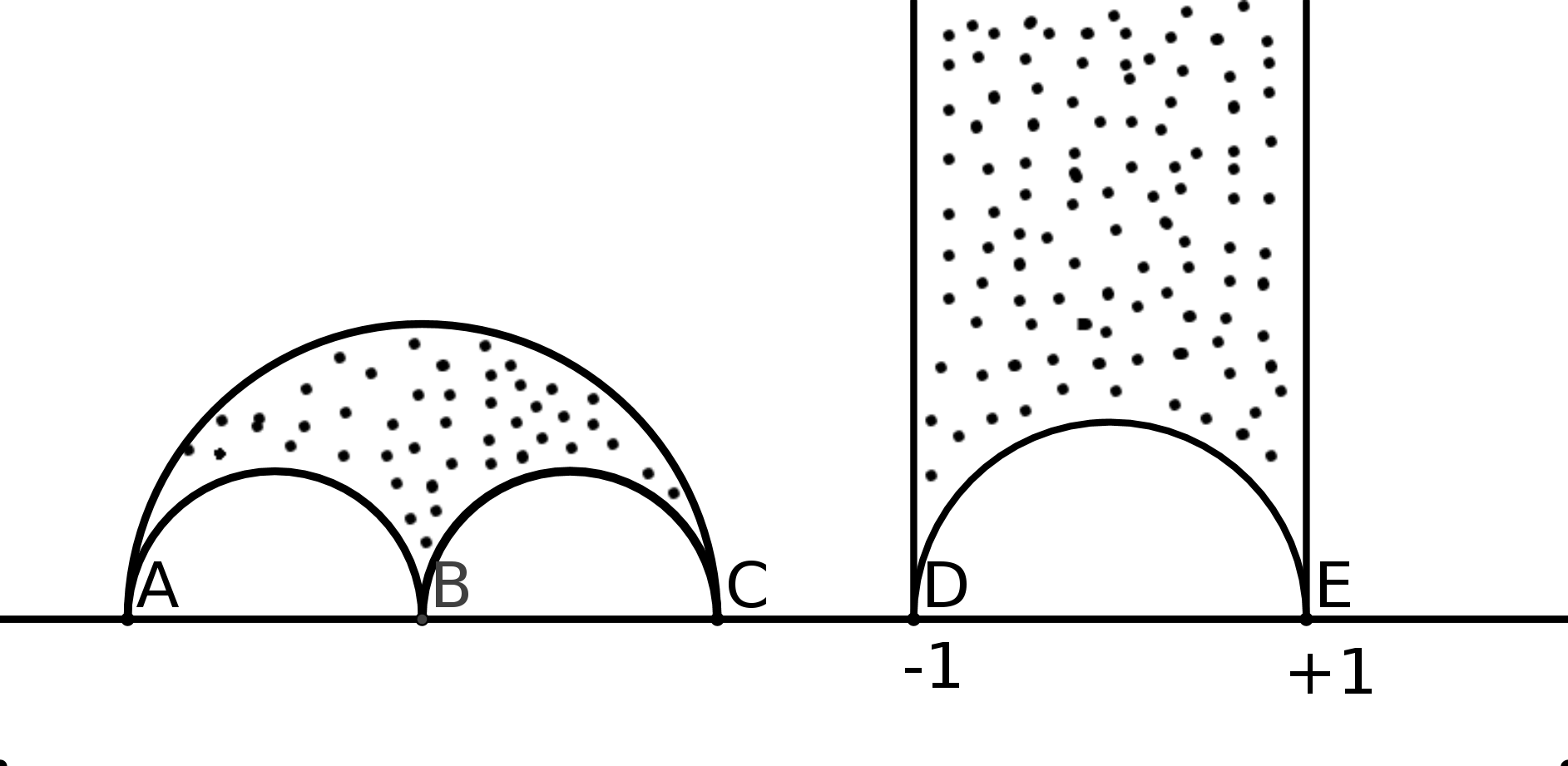
Sur la figure ci-dessus on a transformé le triangle ABC en le triangle DEF, F étant le point ŕ
l’infini. Il suffit pour cela de prendre une inversion par rapport ŕ un cercle K de centre
l’un des sommets puis de composer une translation avec une homothétie pour obtenir
DEF. Voir figure ci-dessous dans laquelle on a pris l’inversion de cercle K et de centre
C.
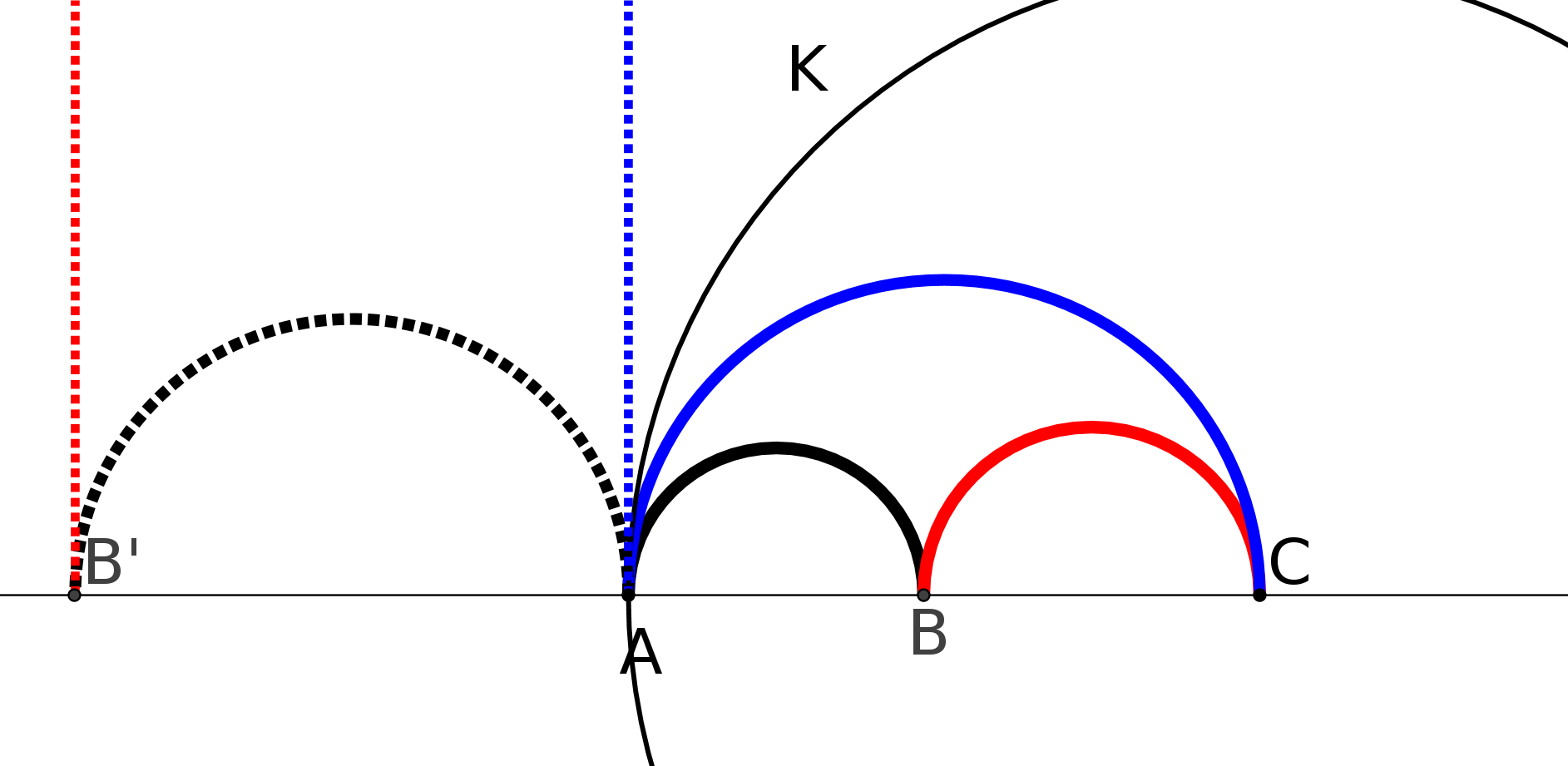
Ainsi tous les triangles idéaux sont congruents entre eux puisqu’ils sont congruents au męme
triangle idéal DEF. Ils ont donc tous la męme aire.
calculons l’aire de DEF :
Ce domaine est défini par
Donc son aire est égale ŕ
Donc, les isométries conservant l’aire hyperbolique, le triangle idéal ABC a pour aire
.
2. Aire d’un triangle semi idéal, c’est ŕ dire ayant deux sommets sur l’axe des réel et le troisičme sommet réel.
a- deux triangles semi idéaux sont congruents si et seulement si ils ont le męme angle intérieur en leur sommet réel. Soient deux triangles semi idéaux ABC et A’B’C’, B, C, B’ et C’ sur l’axe des réels.
S’ils sont congruents ils ont évidemment les mes angles.
S’ils ont le męme angle en A et A’. Il existe une isométrie qui transforme A en A’. ABC sera transformé en un triangle semi idéal, noté A’B"C".
Puis il existe une isométrie transformant la géodésique A’B" en A’B’. Alors A’B’C" sera
transformé en un triangle semi idéal, noté A’B’D.
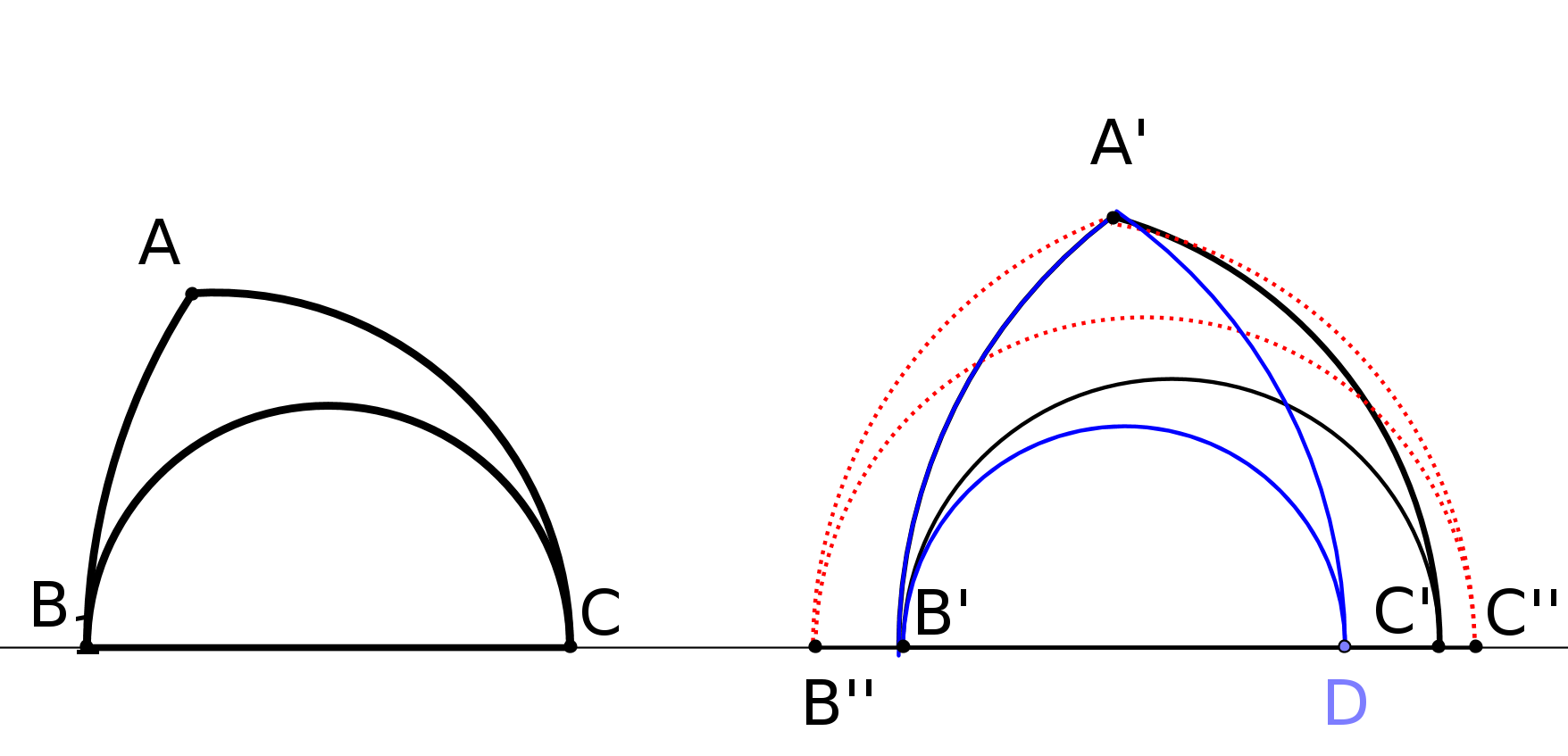
Et comme l’angle des géodésiques A’B’ et A’D est le męme que celui de A’B’ et A’C’ les
triangles A’B’C’ et A’B’D seront soient congruents soient symétriques par rapport ŕ A’B’. Donc
ABC et A’B’C’ sont congruents et donc de męme aire.
b- l’aire d’un triangle semi-idéal est égale ŕ
oů
est
l’angle intérieur du sommet réel.
On note l’aire d’un
triangle semi idéal.
est bien défini puisque tous les triangles semi idéaux de sommet réel
sont
congruents.
Soient deux triangles semi idéaux ABC et ACD de sommet réel A. On note respectivement
et
les
angles BAC et CAD.
On suppose
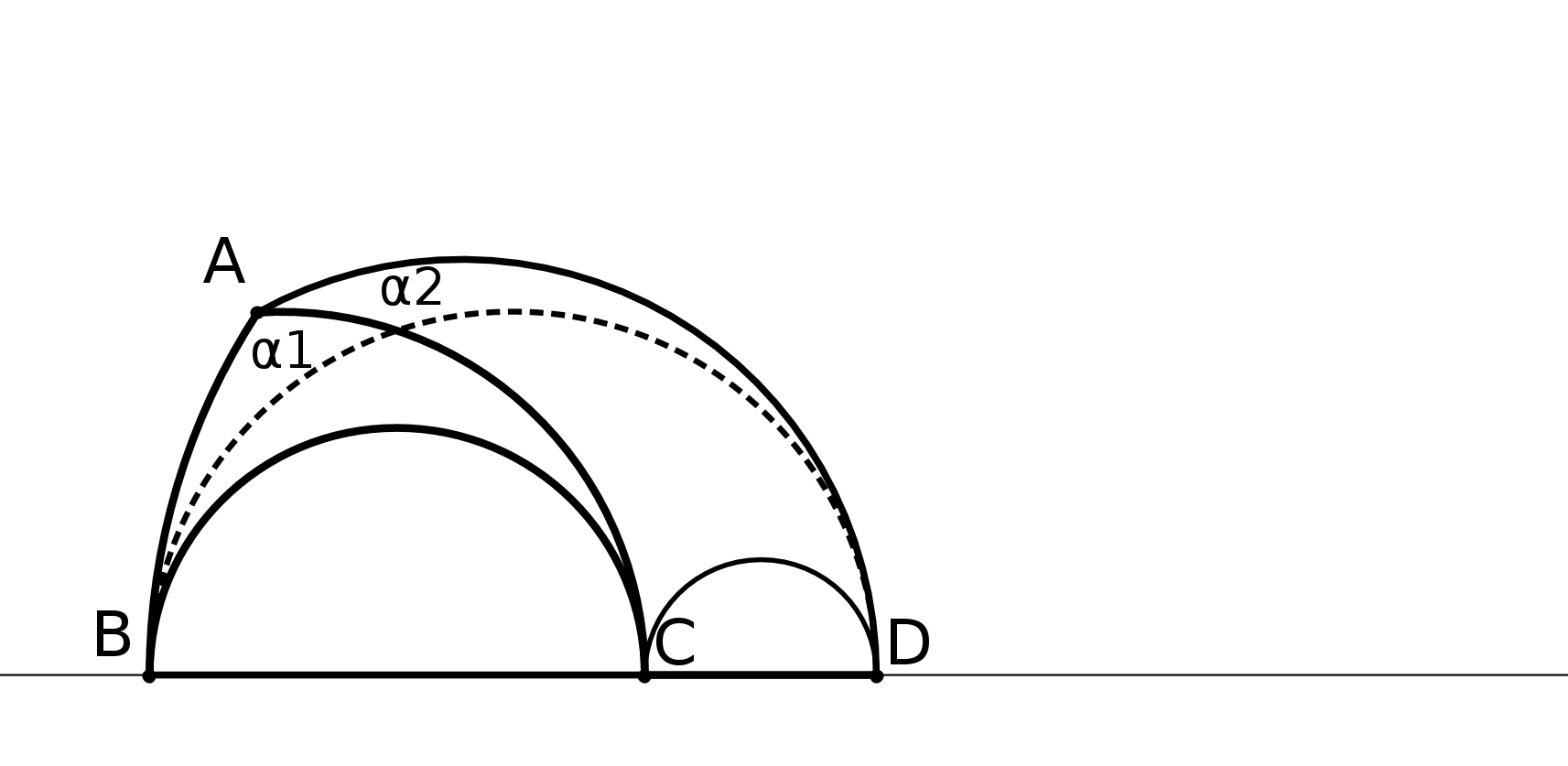
On a : donc
.
Soit la fonction définie sur par . On a :
. Donc
.
Donc est additive sur . Soit un entier naturel. On a :
d’oů puis, si le rationnel est dans , . Comme est continue sur on obtient, pour tout réel de , .
On a donc donc donc
. D’oů . Ainsi
Pour tout on a donc
donc .
Si on a donc
.
Donc pour tout ,
.
c- Calculons l’aire d’un triangle dont les trois sommets sont réels.
(i) Soit un triangle ABC dont l’un des côtés est une droite, par exemple AB.
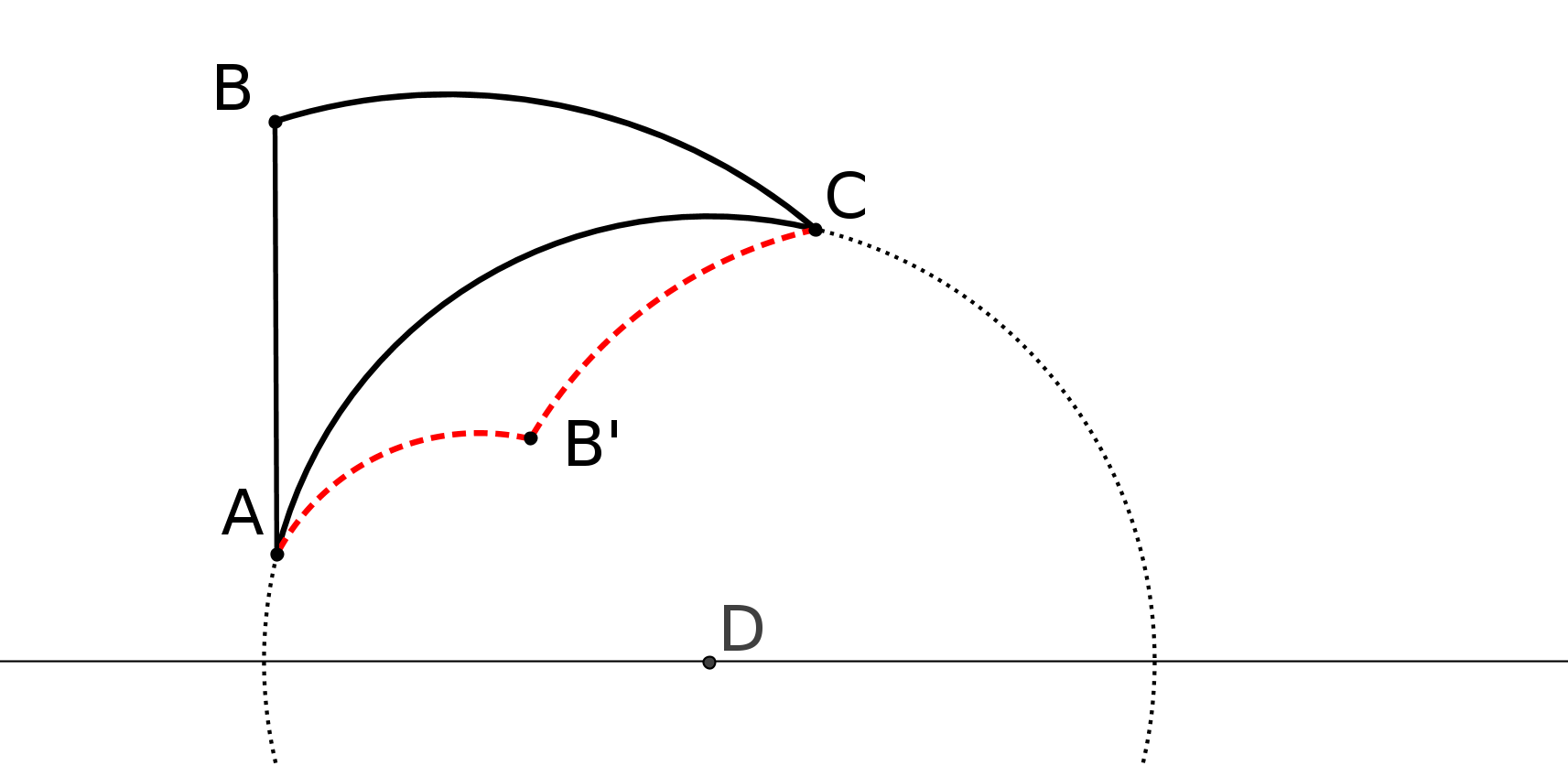
Soit l’inversion I par rapport au cercle de centre D et de rayon AD. Alors l’image de ABC est le
triangle AB’C qui est constitué de trois géodésiques non droites. AB’C est congruent ŕ ABC
donc de męme aire. Dans la suite on prendra un triangle dont les trois côtés sont des
géodésiques-cercles.
ii Soit un triangle ABC dont les trois angles intérieurs sont notés
,
et
.
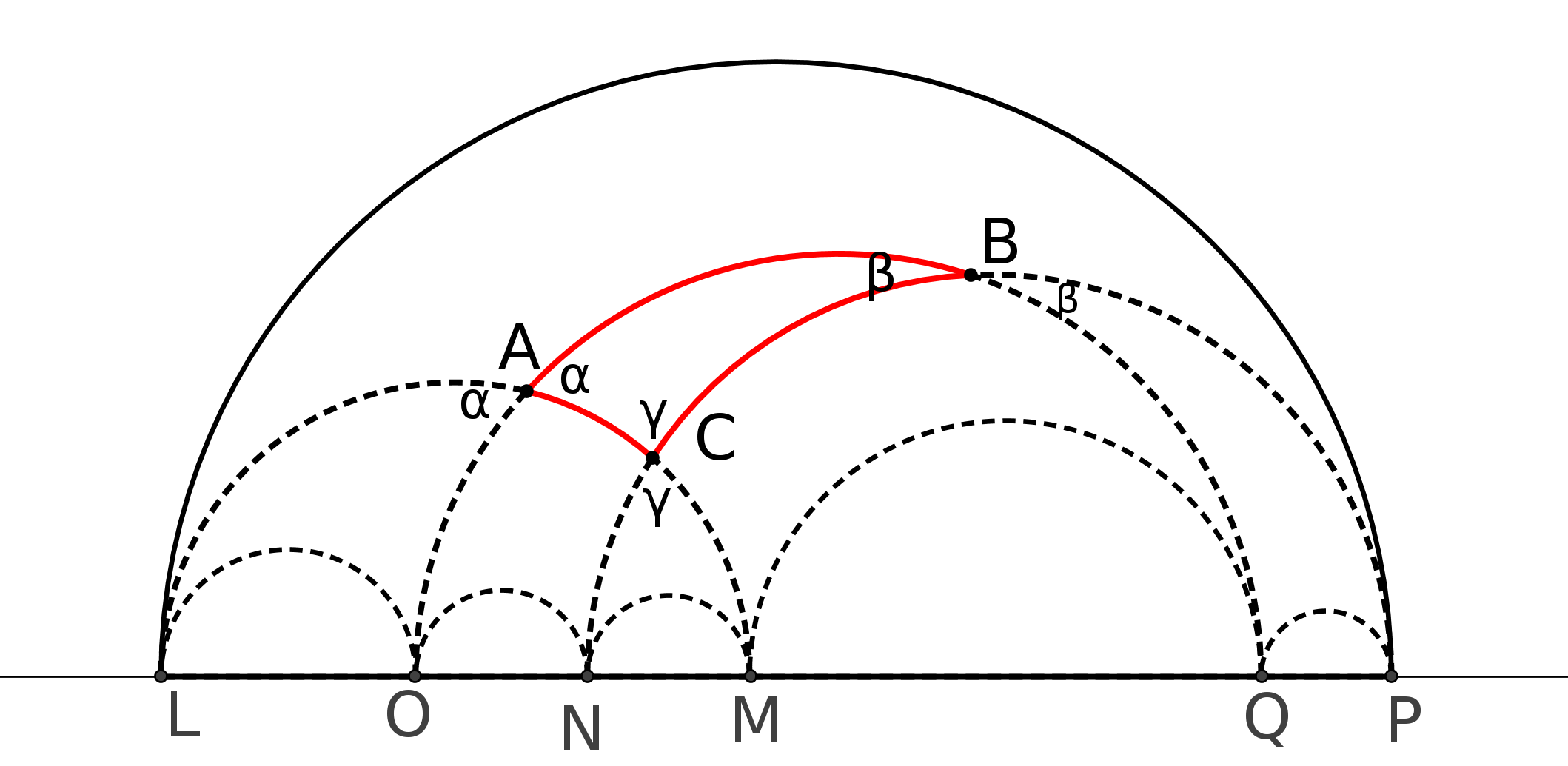
Les triangles LAO et MAQ sont deux triangles semi idéaux de męme aire égale ŕ .
Les triangles OBN et PBQ sont deux triangles semi idéaux de męme aire égale ŕ .
Les triangles MCN et PCL sont deux triangles semi idéaux de męme aire égale ŕ
.
La réunion des 6 triangles précédents est égale ŕ l’hexagone, H, idéal LONMQP dont tous les sommets sont sur l’axe des réels et ŕ deux fois le triangle ABC.
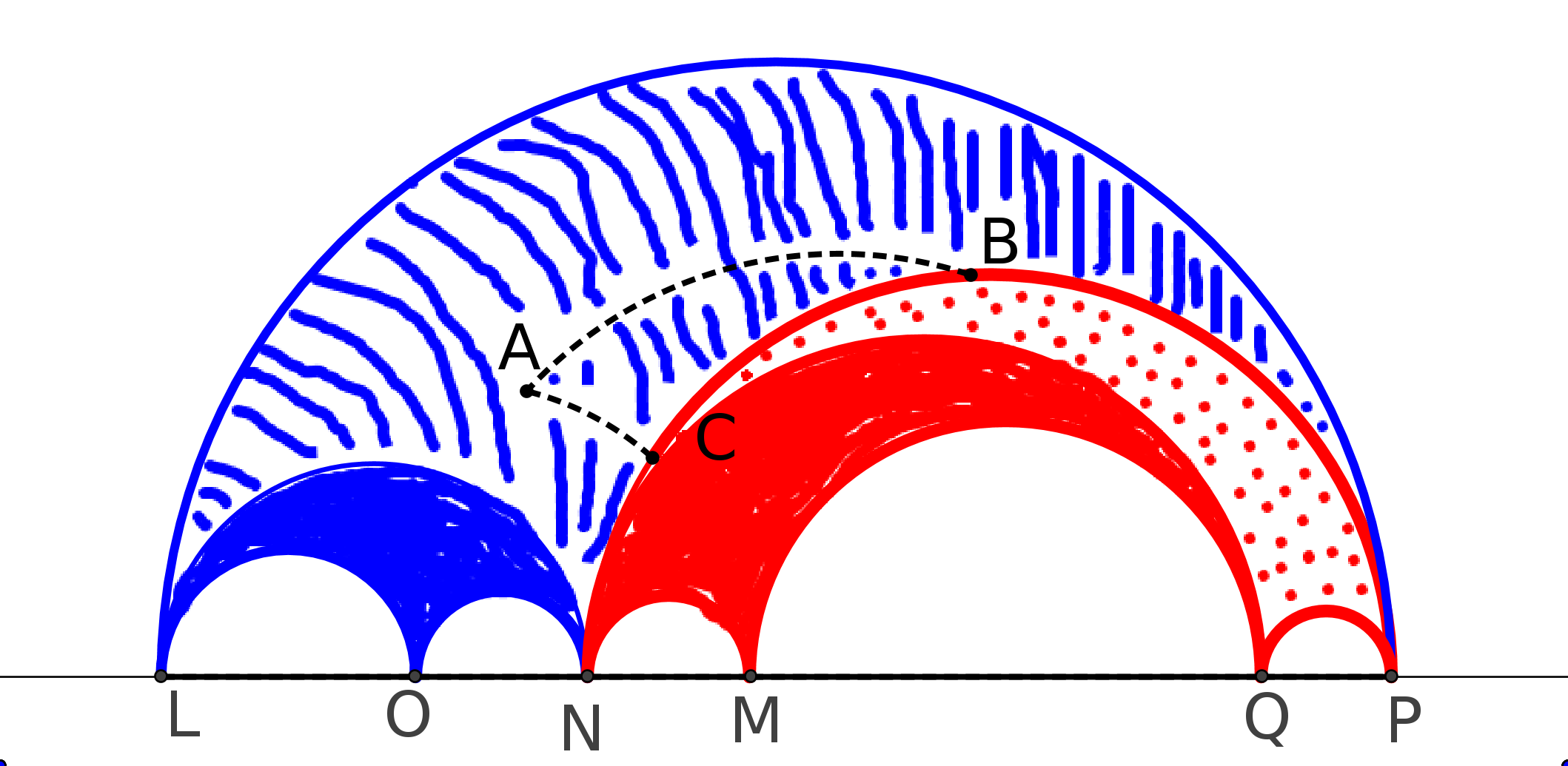
H est aussi la réunion des quatre triangles idéaux PLN, LON, NPQ et NMQ.
On obtient :
Donc .
Proposition 5.5 :
L’aire d’un triangle hyperbolique est égale ŕ
.
On a démontré, en particulier, un résultat qu’avait démontré Lambert :
corollaire : soit un triangle ABC dont l’aire est égale ŕ
. Alors la somme des angles
de ABC est égale ŕ .
La somme des angles d’un triangle dépend donc de son aire.
Définition : On appelle cercle hyperbolique de centre
et de
rayon ,
, l’ensemble des
points tels que
et on appelle cercle
euclidien de centre
et de rayon ,
, l’ensemble
des points
tels que
.
Proposition 5.6 : Un cercle, , est un cercle .
Plus précisément un cercle hyperbolique de centre
,
, et de rayon
est un cercle
euclidien de rayon
et de centre d’affixe .
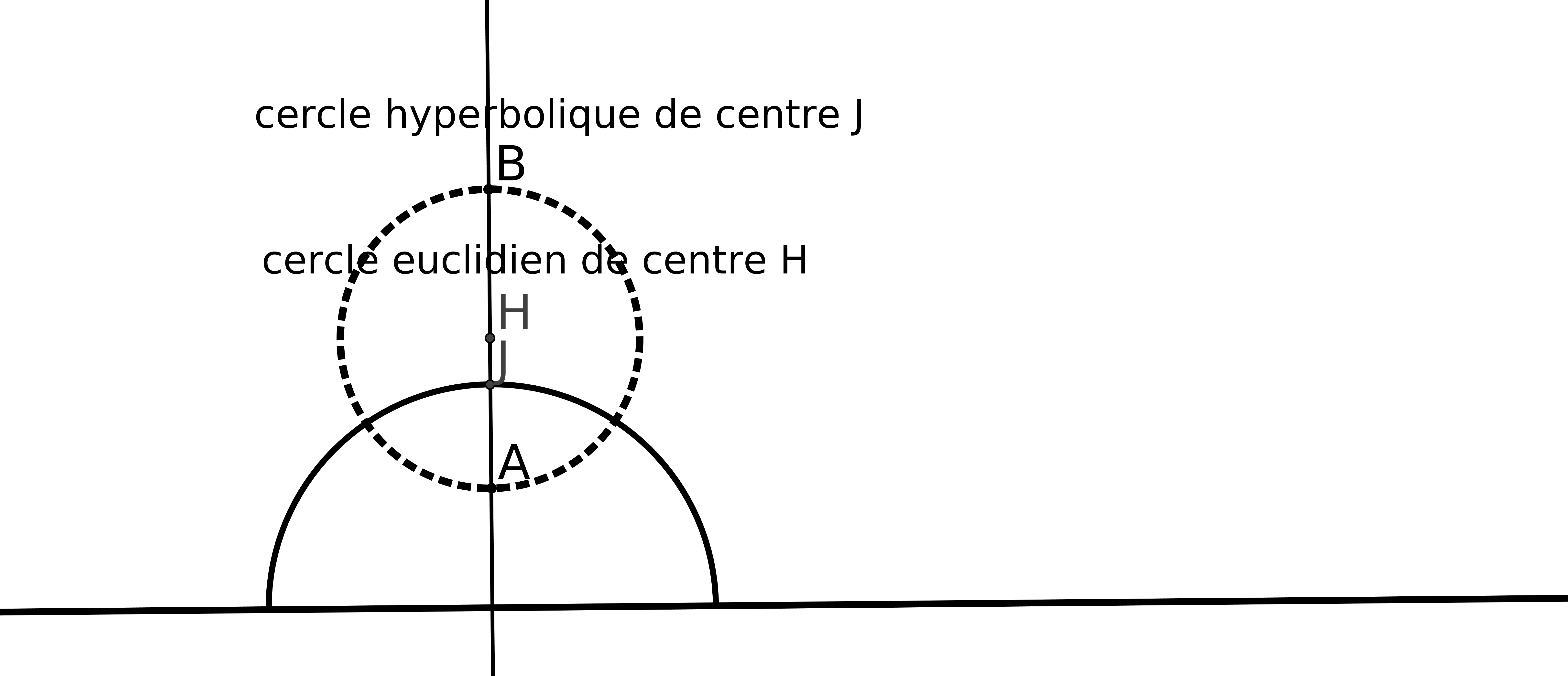
Démonstration :
1. Soit le cercle hyperbolique de centre , , et de rayon . Il existe deux points , , et , , tels que :
a. , .
b. et sont sur la droite, , verticale passant par et .
c. .
En effet : équivaut ŕ ou encore
donc ,
. pour
tout ,
donc
.
On remarque que .
Donc, si est le point
d’interchapter de
avec l’axe des réels,
est l’image de
par l’inversion ,
étant le cercle
de centre et
passant par .
2. Soit un point de . Alors . Donc
ou encore ou encore
. Posons
. Alors
équivaut ŕ affirmer
que appartient au
cercle euclidien, , de
centre O et de rayon .
On a . Rappelons que
est la composée dans cet
ordre de la translation, ,
d’écriture complexe
et d’une inversion de centre O, d’une similitude et d’une autre translation. Le cercle
ne passe pas par le point
d’affixe 1 donc l’image de
par est un cercle ne passant
pas par O donc l’image par
de , qui est égale
ŕ , est un cercle
euclidien. Donc
est un cercle euclidien.
3. On a et . L’axe des réels a pour image lui-męme par la translation d’écriture complexe . Donc l’image de l’axe des réels par est une droite (D) passant par et . Donc (D) est la droite verticale passant par , donc par . Ainsi (D) contient aussi et .
L’axe des réels est orthogonal ŕ donc (D), son image, est orthogonale ŕ . Donc (D) est un diamčtre de . Donc est son diamčtre.
Et on a .
D’oů le résultat.
4. Le fait que est
orthogonal au cercle de centre
et de rayon
est un résultat sur la puissance d’un point par rapport ŕ un cercle.
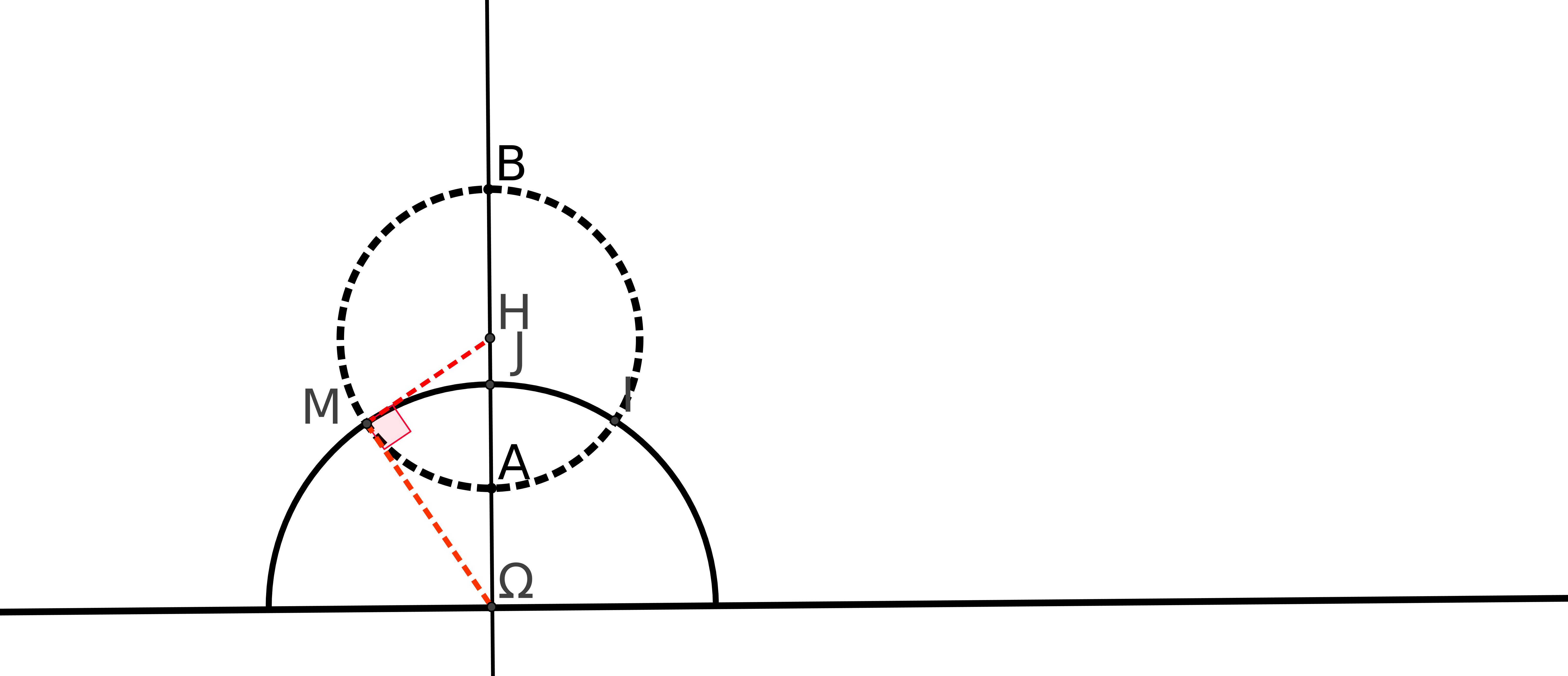
En effet, on a : .
Donc le triangle
est rectangle en M. D’oů le résultat.
Remarque : un cercle hyperbolique est aussi un cercle euclidien mais son centre hyperbolique est
excentré.
1. Par commodité nous commencerons par travailler dans le disque hyperbolique
.
Soit le cercle de rayon , , et de centre O. Alors est le chemin de défini par : pour tout de , . Donc sa longueur, , est :
.
2. Soit la transformation de Möbius définie par . Nous avons vu que est une bijection de dans . (C) ne passe pas par le point d’affixe 1 donc son image par la translation, , ne passe pas par O. Donc l’image de (C), , par est un cercle euclidien de P, donc hyperbolique. Précisons sa position.
Les points et d’affixe et sont deux points de et de l’axe des réels. et ont pour affixe respectives et donc et sont sur l’axe des imaginaires.
L’axe des réels est invariant par la
translation,. Donc son image,
par , est une droite : c’est
l’axe des imaginaires. Comme
conserve l’orthogonalité et que l’axe des réels est orthogonal ŕ (C), l’axe des imaginaires est orthogonal ŕ
. Donc l’axe des imaginaires
passe par le centre de .
et
sont diamétralement
opposés. donc
a pour rayon
oů est le centre
hyperbolique de .
Déterminons qui a une
affixe imaginaire pure,
.
équivaut
ŕ ou encore
. Donc
est le point
d’affixe .
On a :
3. Calculons le périmčtre de en fonction de .
On a : et . Donc
.
Donc .
Donc .
3. Soit C un cercle hyperbolique. Il existe une isométrie hyperbolique transformant C en
donc C a la męme
longueur que .
Ainsi nous avons la proposition :
Proposition 5.7 : Le périmčtre d’un cercle hyperbolique est égal ŕ
.
Autre démonstration :
On peut démontrer directement ce résultat sans passer par le disque U. On utilise le
théorčme des résidus (cf ŕ n’importe quel cours sur les fonctions holomorphes). Voici la
démonstration :
Soit le chemin
défini sur
par oů
est un complexe de partie
imaginaire, , strictement
positive et on suppose .
Alors est le
cercle euclidien, ,
de centre et
de rayon . On
a . Donc la
longueur de
est :
Soit C le cercle de centre O et de rayon 1. Il a pour équation complexe . Alors et . Donc
Posons . Alors .
est une fonction méromorphe de pôles simples et égaux ŕ :
et . On a et (puisque ). Donc seul est ŕ l’intérieur de C. Ainsi
.
On a . Et . Donc
. Si on appelle R le rayon du cercle pris comme cercle hyperbolique on a : d’oů oů .
Alors . Donc
. D’oů le résultat.
Soit un cercle hyperbolique de rayon R. Alors son aire est égale ŕ
Proposition 5.8 : L’aire d’un disque hyperbolique est égale ŕ
.
Définition : Soient deux géodésiques C et C’ distinctes. On appelle bissectrice de C et C’ une géodésique D telle que la réflexion hyperbolique d’axe D transforme C en C’.
Proposition 5.9 : tout couple de géodésiques admet admet au moins une bissectrice.
Démonstration :
Il y a deux types de réflexions hyperboliques : les réflexions par rapport ŕ une droite (D) orthogonale ŕ
la frontičre ()
de P et les inversions de cercle (K) dont le centre est sur
().
A. Recherchons les réflexions par rapport ŕ une droite (D) transformant (C) en
(C’) :
Dans ce cas (C) et (C’) sont soient deux droites soit deux cercles de męme rayon. Dans ce cas (C)
et (C’) ont une bissectrice qui est l’axe de la réflexion.

B. Recherchons les inversions de cercle K de centre I sur () transformant (C) en (C’) :
cas 1 : les géodésiques, (C) et (C’), sont deux droites.
Dans ce cas il n’y a pas d’inversion transformant (C) en (C’) puisque l’image d’une droite est un
cercle.
cas 2 : (C) est une droite et (C’) est un cercle.
On suppose que (C) coupe () en A et que (C’) a pour diamčtre [BC], B et C étant deux points de ().
Soit
une inversion de centre I transformant (C) en (C’). (C) est une droite donc (C’) passe par I. Donc
I=B ou I=C.
a. A=B.
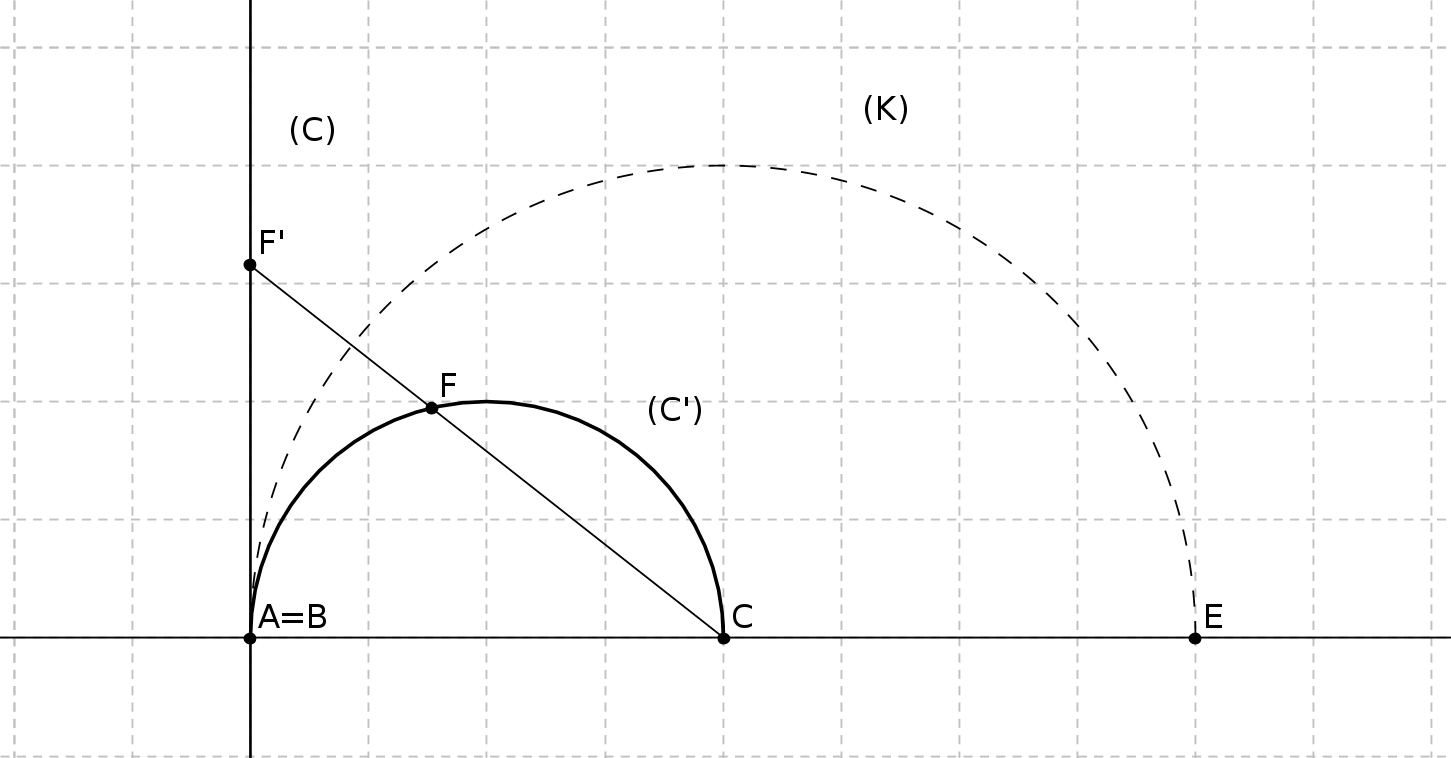
* I=B=A est impossible car l’image de (C) serait (C).
** I=C. Alors ((C))=(C’) implique que A est invariant donc que le cercle (K) est de rayon CA.
Par l’inversion
de centre C et de cercle (K), (C) est transformée en (C’). (C) et (C’) admettent une seule bissectrice
(K).
b. A[BC]
*I=B est impossible car dans ce cas A ne peut pas avoir comme image C.
**I=C. Alors il existe une seule inversion
transformant A en B, donc (C)en (C’).
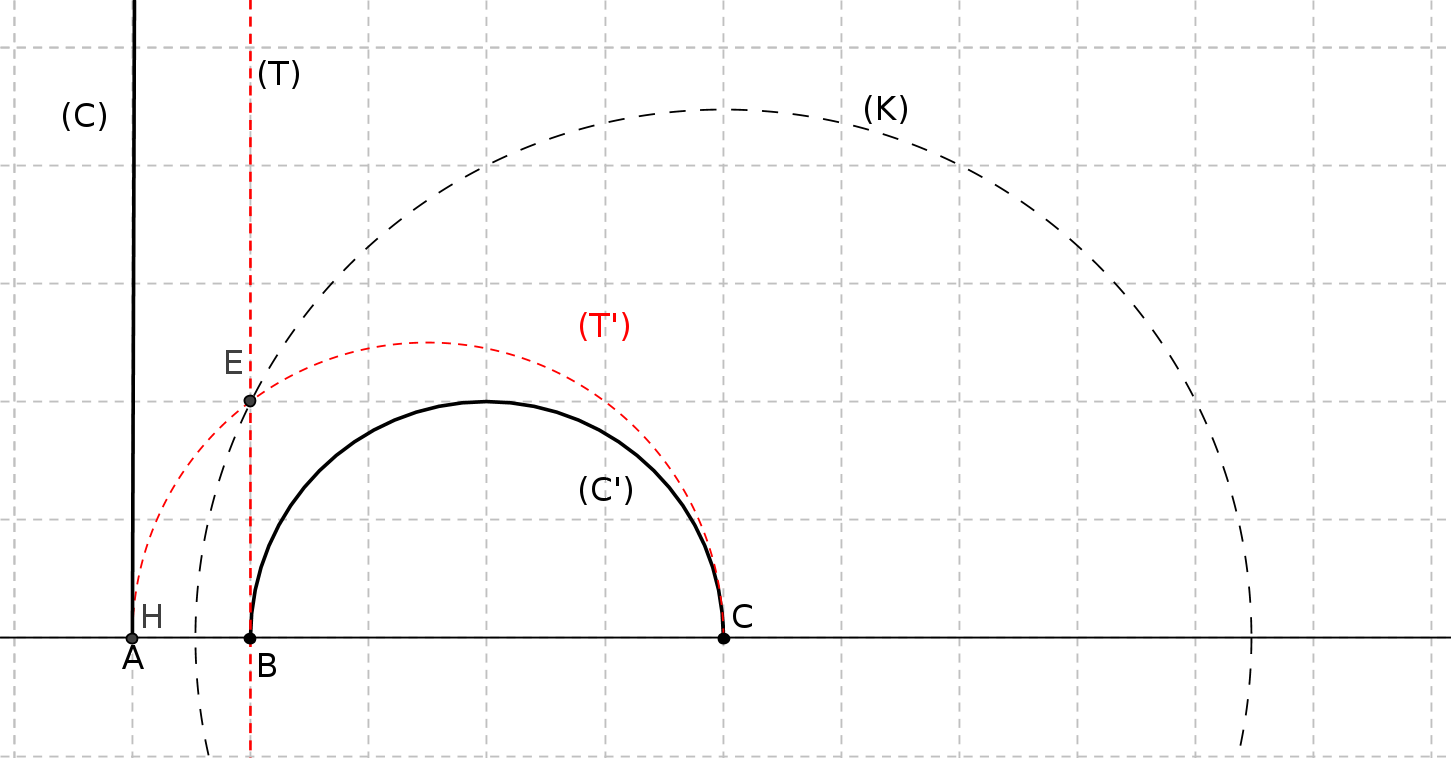
Construction de la bissectrice (K).
Par la
tangente (T) ŕ (C’) en B a pour image le cercle (T’) de diamčtre CA. (T) et (T’) ont un point d’interchapter,
E, invariant par .
Donc (K) est le demi-cercle de centre C est de rayon CE.
c. A[BC]
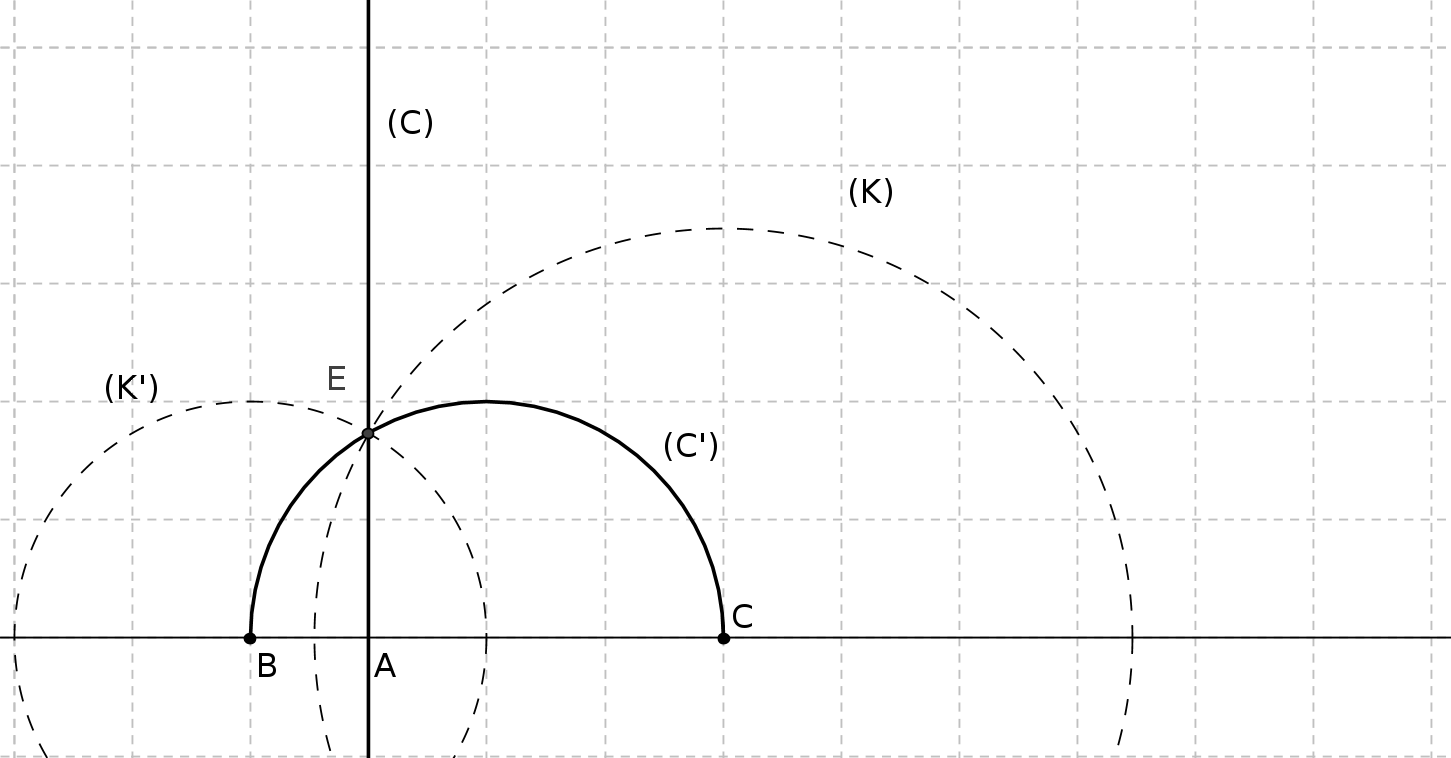
Alors I=B et I=C conviennent et (C) et (C’) ont deux bissectrices : les demi-cercles
respectivement, de centre B et de rayon BE, de centre C et de rayon CE.
cas 3 : (C) et (C’) sont deux demi-cercles.
On suppose que (C) a pour diamčtre [AB], A et B étant deux points de
(),
que (C’) a pour diamčtre [CD], C et D étant deux points de
().
a. Si (C) et (C’) ont le męme rayon il n’y a pas d’inversion transformant (C) en (C’) puisque une
inversion transforme un cercle en un autre cercle de rayon distinct du premier.
b. On suppose que ABCD.
Soit
l’inversion de centre A et qui transforme C en D. Alors (C) a pour image une droite (C1)
et (C’) a pour image lui-męme. (C1) et (C’) ont au moins une bissectrice (K’). Alors
((K’)=(K)
est une bissectrice de (C) et (C’).
Construction d’une bissectrice
On trace le cercle, , de . Pour cela on trace la tangente ŕ (C’) en C puis son image par . Ces courbes se coupent en M. Le cercle de est le cercle de centre A et de rayon AM.
Puis on trace l’image, B’, de B par . Pour cela, si ne coupe pas (C),on trace la tangente ŕ (C) en B qui coupe en N. L’image de la tangente est le cercle de centre sur passant par A et N. Ce cercle coupe en B’. Si coupe (C), c’est encore plus simple.
L’image de (C) par est la droite, (C1), perpendiculaire ŕ en B’. Puis on trace, (K’) ou (K"), la ou les bissectrices de (C1) et (C’) comme on l’a fait dans le cas 2.
On obtient alors la ou les bissectrices de (C) et (C’) en prenant la ou les images de (K’) ou (K")
par .
i. figures lorsque (C) et (C’) sont sans points communs réels :
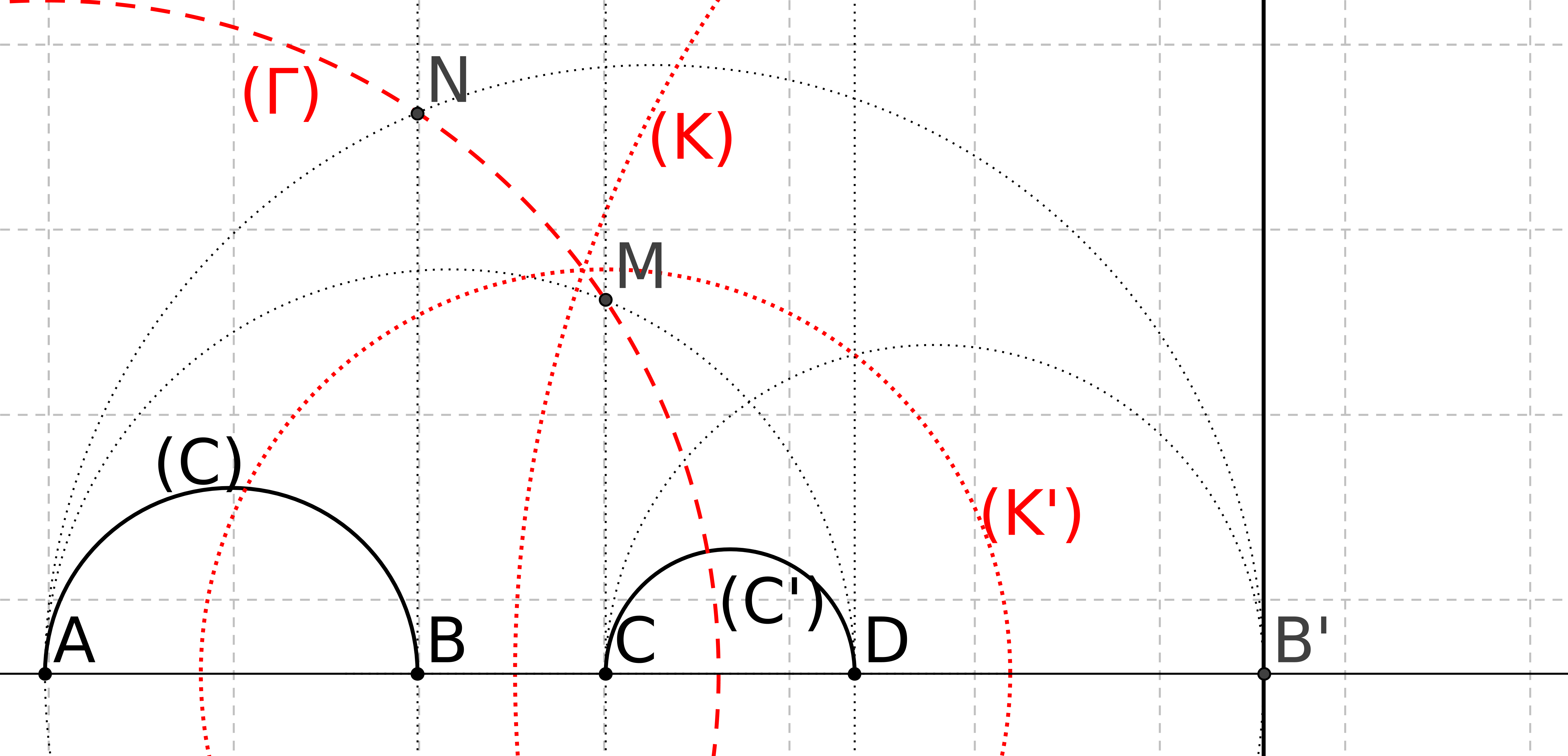
OU
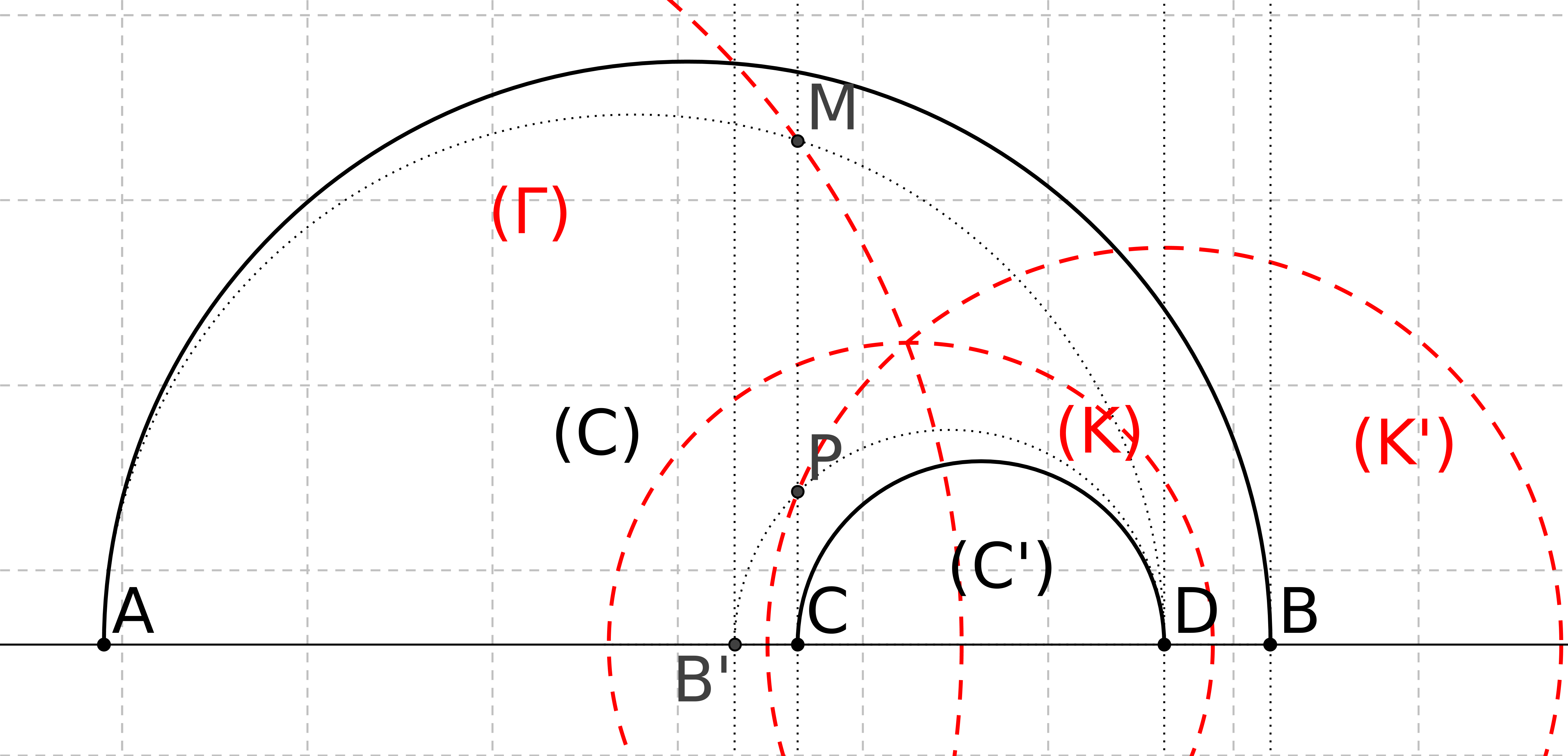
OU
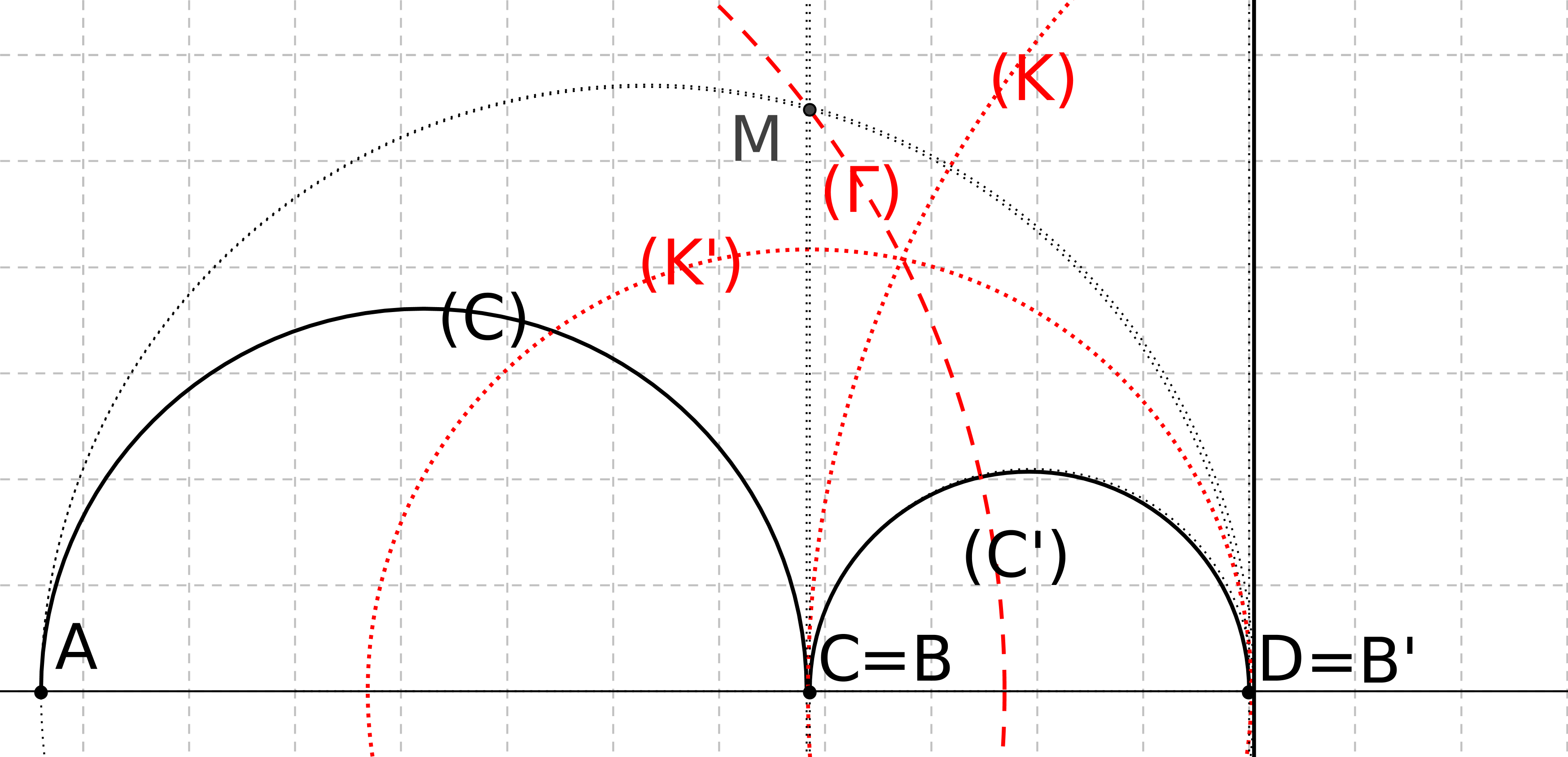
ii. figure lorsque (C) et (C’) ont un point commun réel :
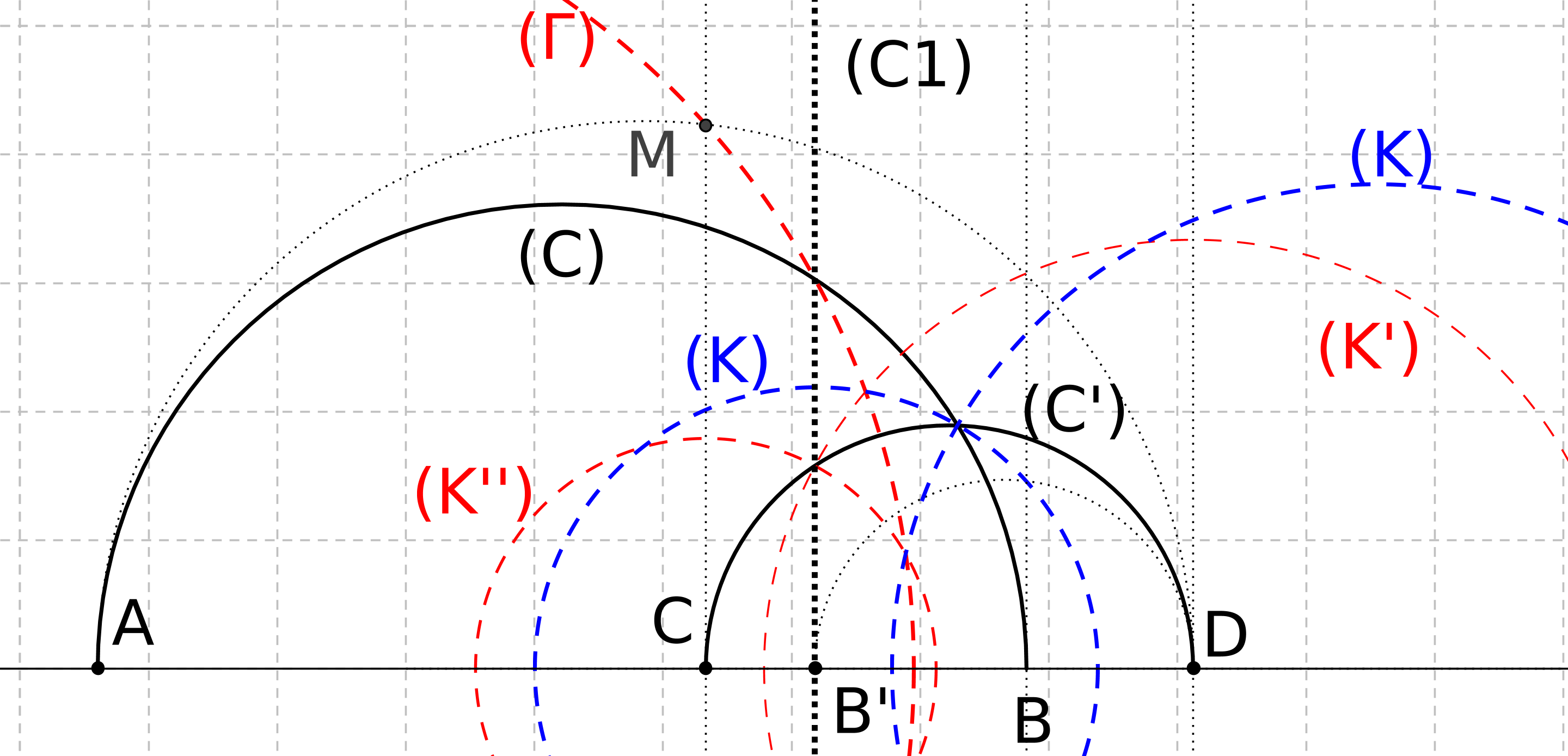
Remarque : quand il y a deux bissectrices, elles sont orthogonales : en effet les cercles des
inversions correspondant aux bissectrices sont orthogonaux.
On peut résumer le travail précédent dans la proposition suivante :
Proposition 5.10 : soient deux géodésiques (C) et (C’).
1. Si (C) et (C’) sont deux droites ou deux demi-cercles de męme rayon, alors (C) et (C’) admettent une seule bissectrice qui est une droite : l’axe de symétrie transformant (C) en (C’).
2. Sinon,
a. Si (C) et (C’) n’ont pas de point d’interchapter réel, elles admettent une seule bissectrice qui est le cercle de l’inversion transformant (C) en (C’).
b. Si (C) et (C’) ont un point d’interchapter réel, elles admettent deux bissectrices orthogonales
entre elles.
Remarque : soit un triangle ABC. Soit (K) une bissectrice des géodésiques (AB) et (AC). Soit un point M tel que A n’est pas entre M et B. Soit M’ l’image de M par la réflexion hyperbolique d’axe (K).
Dans le cas oů A est sur le bord de P, quel que soit le point M pris comme ci-dessus A n’est pas entre C et M’.
Dans le cas oů A n’est pas sur le bord de P, quel que soit le point M, A est soit entre C et M’ , soit A n’y est pas .
Si A n’est pas entre C et M’, (K) est appelée bissectrice intérieure de l’angle A du triangle
ABC.
Proposition 5.11 : Soient une géodésique (C) et un point A du demi-plan hyperbolique. Soit P le point
d’interchapter de (C) avec (C’) la géodésique orthogonale ŕ (C) passant par A. Alors, pour tout point M
de (C) on a .
Définition :
est appelée distance hyperbolique de A ŕ (C).
Démonstration : On peut se ramener facilement au cas oů (C) est l’axe des ordonnées en
appliquant ŕ (C) et A une inversion puis une translation.
Alors (C’) est un cercle de centre O et d’équation
et passant par A. Il coupe
(C) au point, P, d’affixe . Un
point M de (C) a pour affixe
avec et A
a pour affixe .
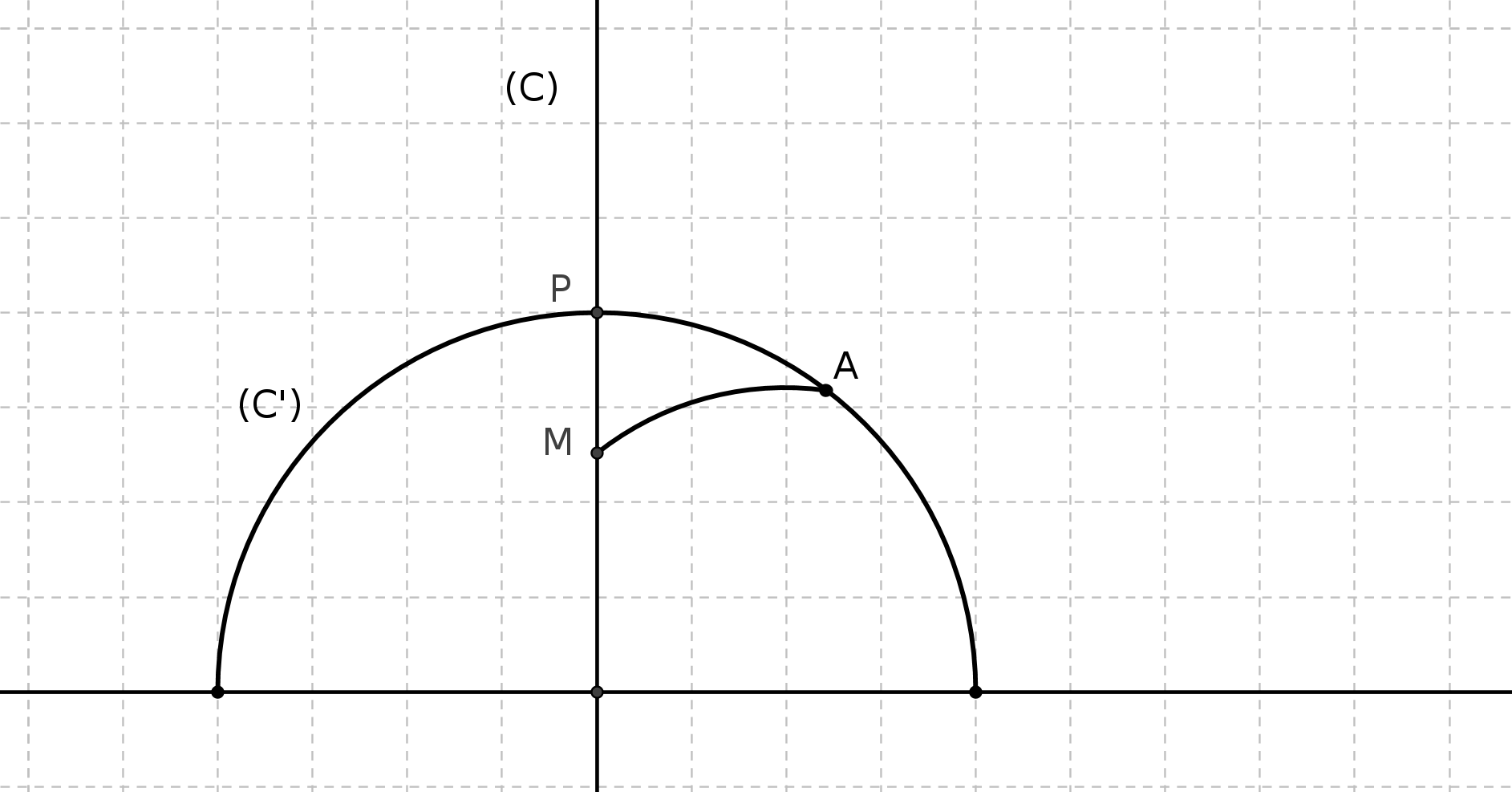
Montrons que, pour tout M, on a : .
équivaut ŕ
ou encore ŕ :
.
Posons .(1)
Alors
et .
Ainsi atteint son maximum pour et donc (1) est vérifié pour tout et on a :
Pour tout M, .
Proposition 5.12 : soient (C) et (C’) deux géodésiques ayant une bissectrice (K). Tout point
de (K) est équidistant de (C) et (C’).
Démonstration :
Soit P un point de (K) autre que le point d’interchapter de (C) et (C’). Soient () et (’) les géodésiques orthogonales respectivement ŕ (C) en A et ŕ (C’) en A’ et passant par P.
Soit l’inversion dans K (ou la réflexion par rapport ŕ K). Alors ((C))=(C’) et (()) est la géodésique orthogonale ŕ ((C)) et passant par (P). Donc (())=(’). Donc (’)(A)=A’.
Comme est une
isométrie on a : .
Ce qu’il fallait démontrer.
Proposition 5.13 : Les bissectrices d’un triangle sont concourantes.
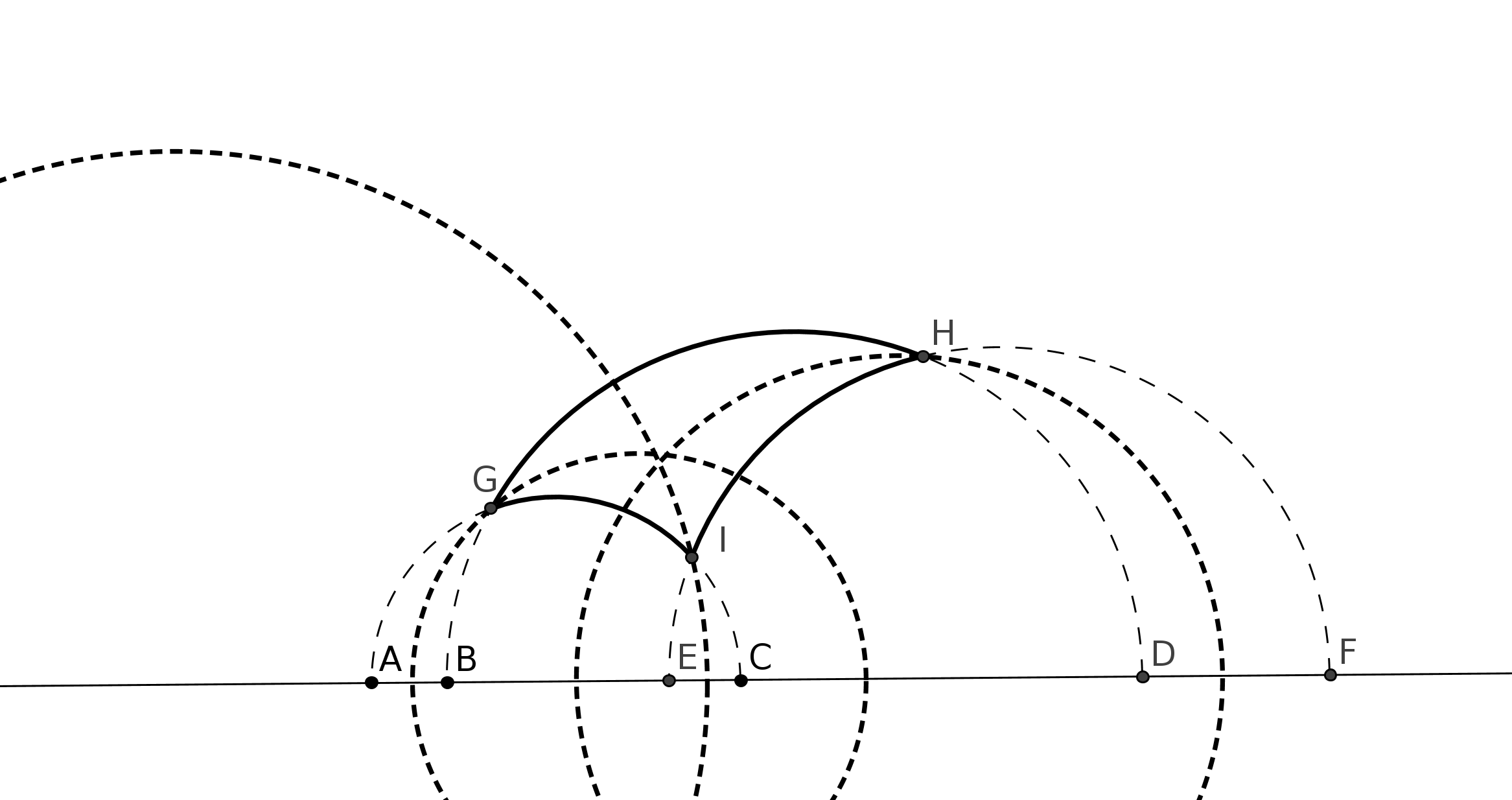
idée de la démonstration : cela tient au fait que tout point d’une bissectrice d’un couple, (C) et
(C’), est équidistant (au sens hyperbolique) de (C) et (C’).
Remarque : ce théorčme est vrai quel que soit le triangle, idéal ou non, semi-idéal ou
non.
Proposition 5.14 : Une isométrie conforme, distincte de l’identité, admet soit un point réel
(c’est-ŕ- dire non situé sur l’axe des réels) fixe, soit un ou deux points fixes sur le bord de P et
aucun ailleurs, soit aucun point fixe, ni réel, ni sur le bord.
Remarque : on notera aussi
le prolongement de
sur le bord de P.
Démonstration :
Soit
une isométrie conforme distincte de l’identité donc d’écriture complexe
oů
sont quatre
réels vérifiant .
Un point M est fixe si et seulement si son affixe
vérifie
ou
encore .
Cas 1 : alors et ou encore .
Si ou , est une translation et il n’y a aucun point fixe, ni réel, ni sur le bord.
Si
est une homothétie dont
le centre est sur le bord.
admet donc un point fixe sur le bord.
Cas 2 : alors l’équation du second degré a pour discriminant .
Si , admet deux points fixes sur le bord du demi-plan.
Si , admet un point fixe sur le bord du demi-plan.
Si ,
admet
un point fixe réel. D’oů la proposition.
Proposition 5.15 : soit une isométrie anticonforme qui admet un axe invariant (une
géodésique-droite ou une géodésique-cercle). Alors cette isométrie est une réflexion
hyperbolique (c’est-ŕ-dire soit une réflexion, soit une inversion).
Démonstration : soit une
isométrie laissant une géodésique
invariante et soit la réflexion
hyperbolique d’axe .
Alors laisse
invariante
et
est une isométrie conforme qui admet une infinité de points fixes. Donc (P.5.14),
est l’identité
donc .
D’oů la proposition.
Proposition 5.16 : si un point réel a la męme image, distincte de lui, par deux isométries
conformes et si ces isométries admettent au moins un męme point fixe alors les deux isométries
sont égales.
Démonstration :
Soient et
ces deux isométries. Soit
le point A d’image A’ par
et . Alors
fixe le point
réel A. Si et
fixent un autre point
B alors fixe aussi B.
Donc, d’aprčs P.5.14,
est l’identité d’oů la proposition.
Proposition 5.17 : Toute isométrie conforme est la composée de deux réflexions
hyperboliques.
Démonstration : Soit une isométrie conforme distincte de l’identité.
On appelle () le bord de P.
Soit elle n’admet aucun point fixe, soit elle en admet un sur
(), soit elle en
admet deux sur (),
soit elle admet un point fixe réel.
Cas 1 : n’admet aucun point fixe :
est alors une
translation, , de
vecteur dirigeant ().
Donc
est la composée de deux réflexions d’axe perpendiculaire ŕ
().
Cas 2 : admet un point fixe, P, sur () :
Soit (D) la droite perpendiculaire ŕ ()
passant par P.
A. Supposons que (D) ait pour image (D) par . Alors aucun point de (D) autre que P n’est fixe par , sinon est l’identité (P.5.14).
Soit AP, un point de
(D). Soit A’=(A). Soit
l’homothétie, , de centre
P telle que (A’)=A.
Alors (A)=A
et (P)=P.
est conforme donc
est l’identité
(P.5.14). Donc
est une homothétie de centre P. C’est donc la composée de deux
inversions de centre P dont le produit des rapports positifs est égal ŕ celui
.
B. Supposons que (D) ait pour image (C). (C) passe par P et (C) étant distincte de (D), (C) est un demi cercle.
Si on pose , d’aprčs ce qui précčde démonstration de P.5.14), et P a pour affixe . On peut supposer positif, sinon on multiplie tous les coefficients par -1 et donc on prendra .
Soit la réflexion d’écriture complexe , c’est-ŕ-dire la réflexion d’axe .
L’écriture complexe de est
. D’oů
.
Donc est l’inversion, , dans le cercle de centre et de rayon . Ce cercle est la bissectrice de (D) et (C). Donc et est bien la composée de deux réflexions hyperboliques.
est
ainsi la composée de la réflexion par rapport ŕ (D) et de l’inversion de cercle la bissectrice de (C)
et (D).
Cas 3 : f admet deux points fixes P et Q sur
().
Soit
la géodésique passant par P et Q. Soit un point réel A de
et posons
. Comme
fixe P et Q,
est invariant par
donc A’ est sur
. Soit (C) la géodésique
orthogonale ŕ
passant par A.
a. Si (AA’) coupe (PQ) en O on prend, (C’), la géodésique de centre O et de rayon tel que .
b. Si (AA’) ne coupe pas (PQ) alors A et A’ sont symétriques par rapport ŕ la médiatrice de [AA’] qui est aussi la médiatrice de [PQ]. Soit (C’) cette médiatrice.
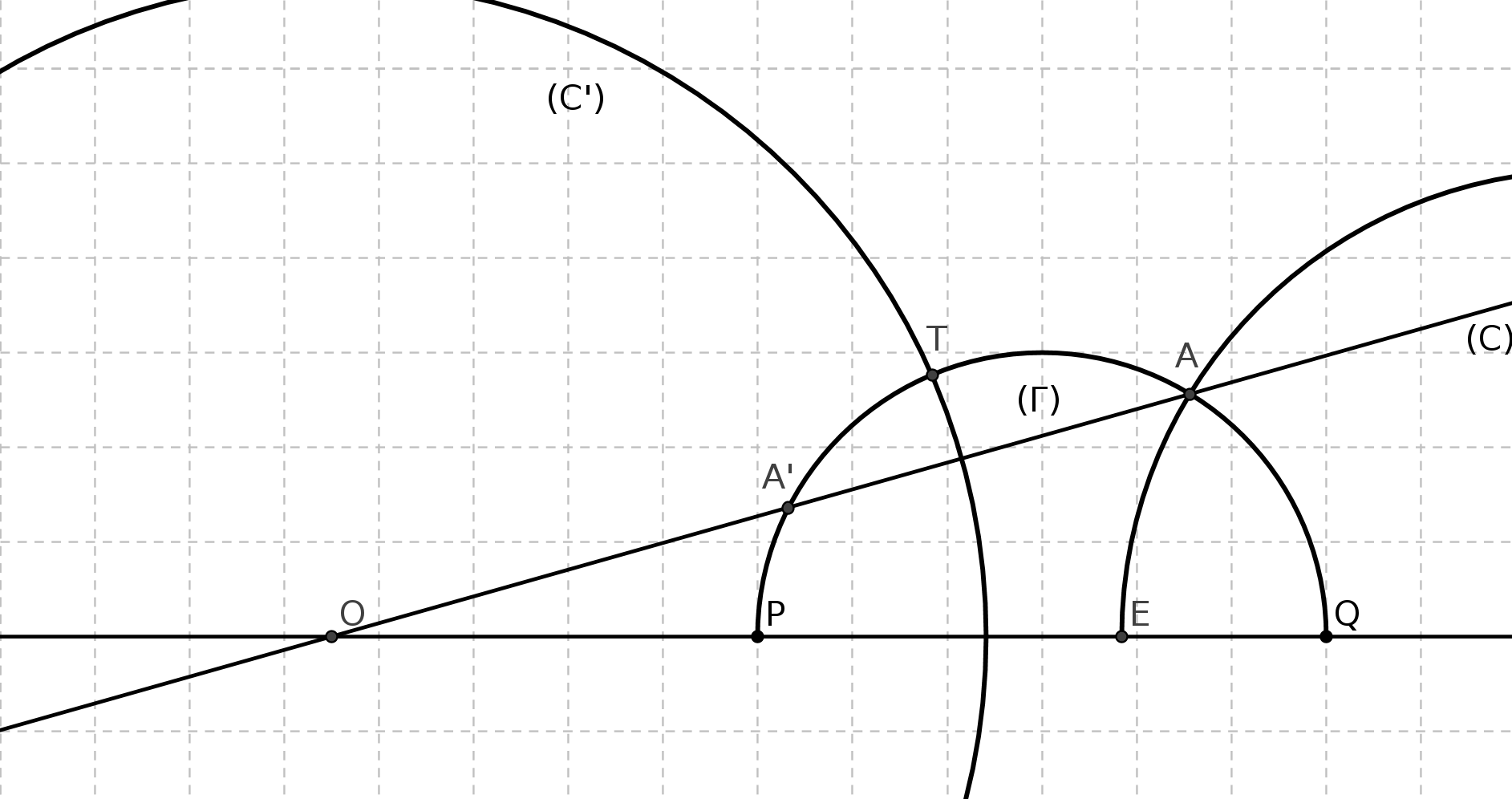
Soient et les réflexions hyperboliques hyperboliques d’axe (C) et (C’). Alors
1. et échangent P et Q donc fixe P et Q.
2. .
3. est une isométrie conforme.
Donc d’aprčs
P.5.16. Donc
est la composée de deux réflexions hyperboliques.
Cas4 : admet un point fixe réel P.
Soit A un point réel et soit A’ son image par
. Soient
(C) la géodésique passant par A et P, (D) la géodésique passant par A’ et P et (C’) la bissectrice
intérieure du triangle PAA’.
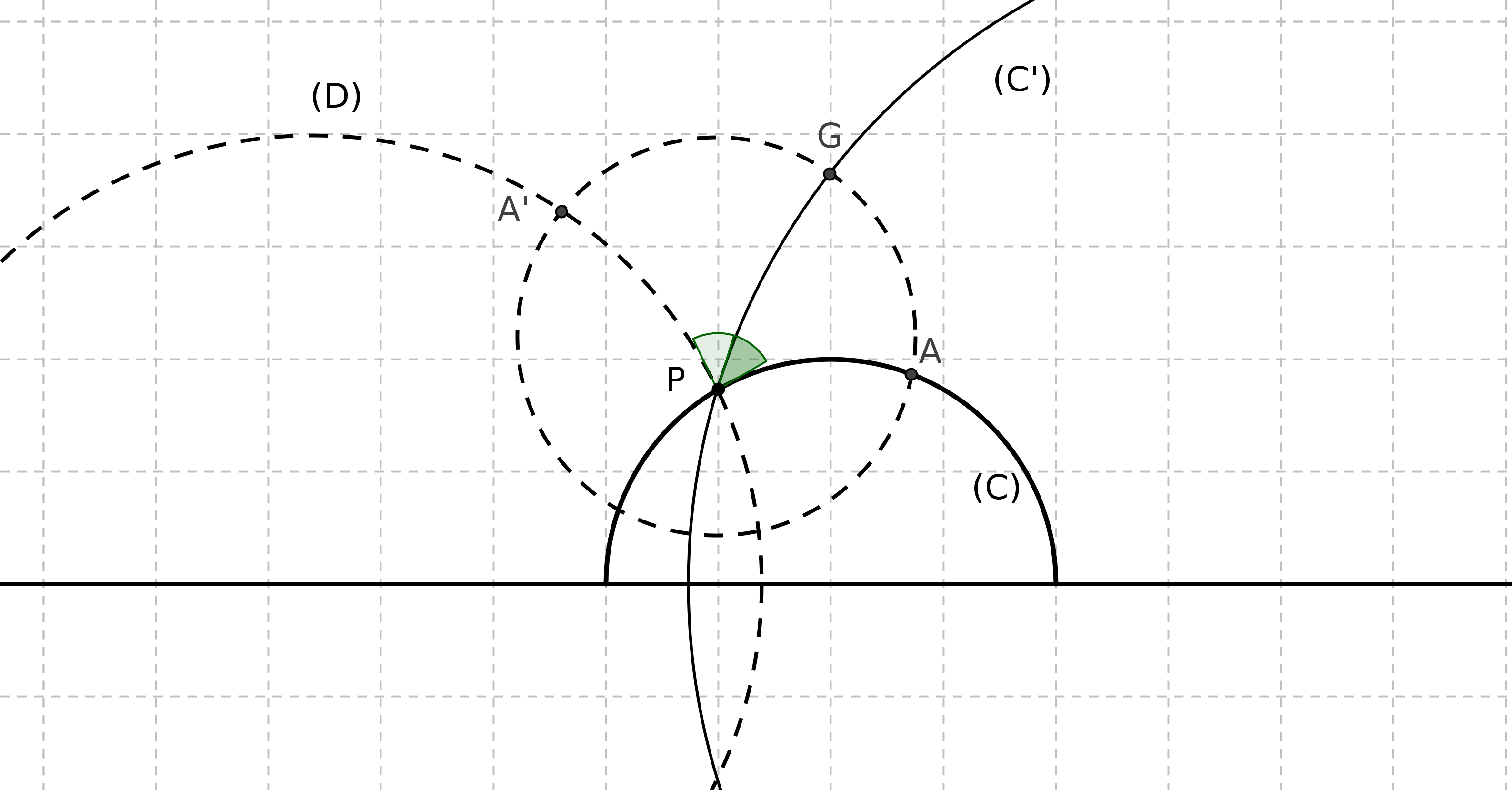
Soit I l’inversion dans (C’) et posons .
est une isométrie donc . Donc A’ est sur (D) et sur le cercle hyperbolique de centre P.
est une isométrie donc . Donc A" est sur (D), puisque (C’) est une bissectrice de (C) et (D), et sur le cercle hyperbolique de centre P.
L’angle orienté des arcs PA’ et PA" étant nul, A" est égal ŕ A’.
Soit J l’inversion dans (D), si (D) est une géodésique-cercle, ou alors J est la réflexion par rapport ŕ
(D). Alors
et .
Ainsi et
sont deux
isométries conformes admettant un point fixe et transformant le męme point réel en la męme image donc
(P.5.16) .
Donc
est la composée de deux réflexions hyperboliques.
Conclusion : Une isométrie conforme est la composée de deux réflexions hyperboliques par
rapport ŕ des géodésiques qui ont, soit un point réel commun, soit un point non réel commun,
soit aucun point commun.
Proposition 5.18 : Soit
une isométrie conforme. Soient les deux géodésiques, (C) et (C’), se coupant suivant un point réel P,
telles que
soit la composée de la réflexion hyperbolique I par rapport ŕ (C) avec la réflexion hyperbolique
I’ par rapport ŕ (C’). Pour tout M du demi-plan hyperbolique, appelons M’ l’image de M par
. Alors
et l’angle orienté de la géodésique PM avec la géodésique PM’ est égal ŕ
oů
est
l’angle orienté de (C) et (C’).
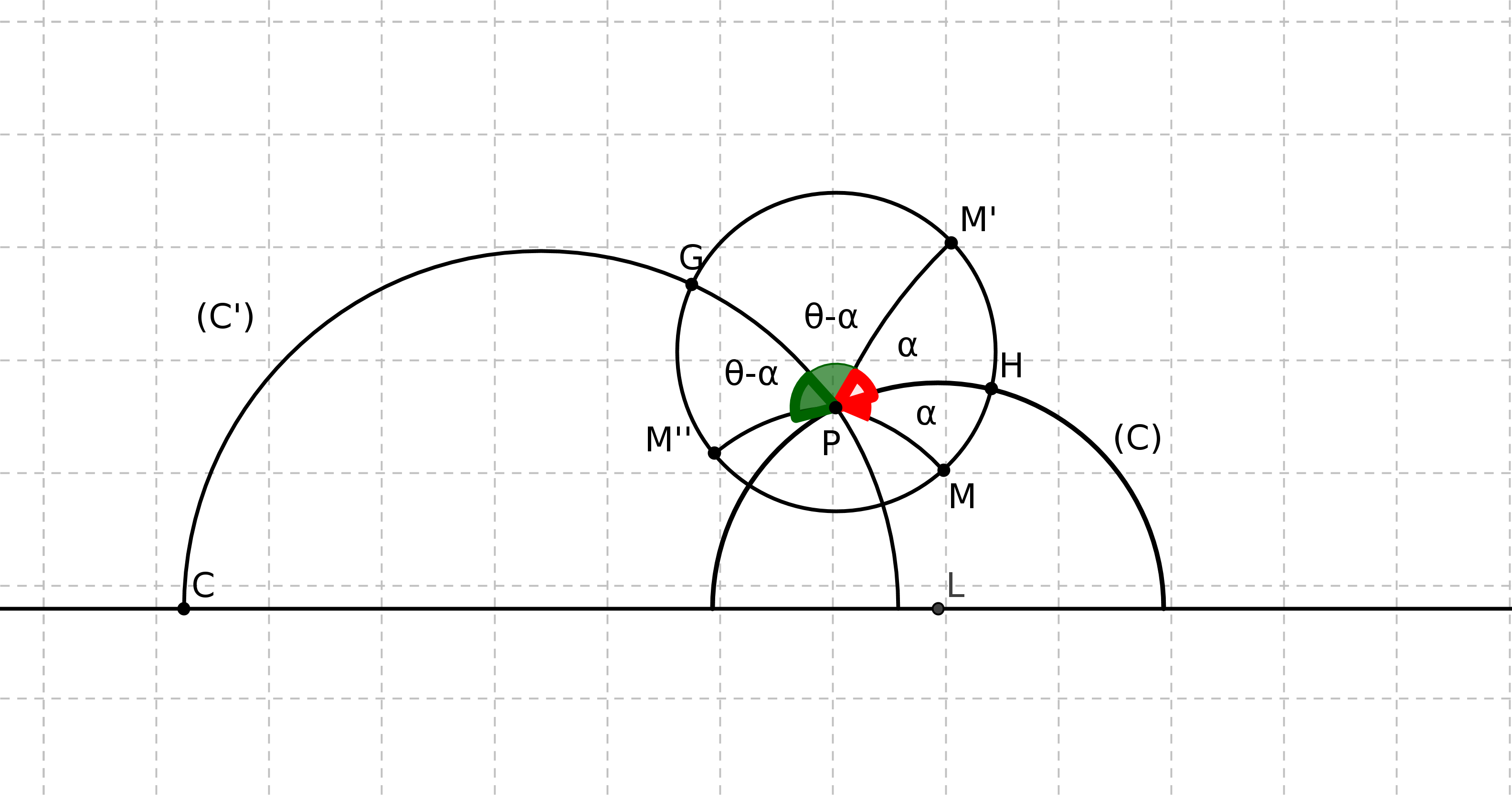
Définition : est appelée
rotation hyperbolique d’angle
et de centre P.
Remarque : dans le plan euclidien, on sait que la composée de deux réflexions d’axes
sécants est une rotation. On retombe ainsi dans la męme situation dans le demi-plan
hyperbolique.
Lemme : Soit une géodésique (C) et un point P de (C).Alors tout cercle hyperbolique
de
centre P est orthogonal ŕ (C).
En effet :
1. Si (C) est une géodésique-droite alors (C) est verticale et admet (C) comme diamčtre donc est orthogonal ŕ (C).
2. Si (C) est une géodésique-cercle, (cf figure), on considčre l’inversion, I, par rapport au cercle
(C) de centre C et de rayon CP.
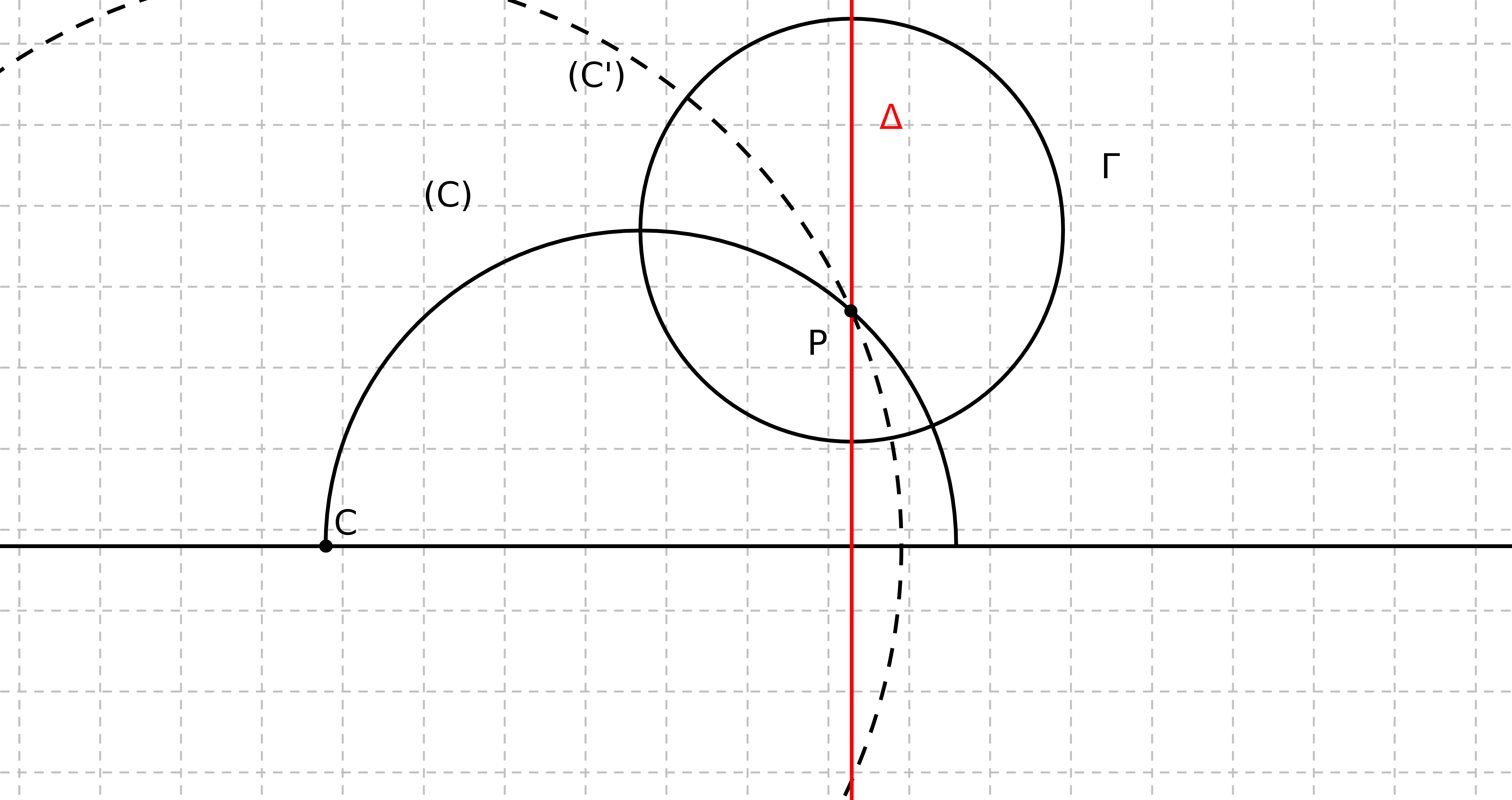
Alors
a. I((C)) est la droite perpendiculaire ŕ l’axe des réels et passant par P. Donc est orthogonal ŕ .
b. I()=. En effet puisque I conserve la distance, pour tout M de , est sur .
Donc I() est
orthogonal ŕ I(C). Donc
est orthogonal ŕ (C).
Démonstration de 5.18
Tout cercle hyperbolique, , de centre P est donc orthogonal ŕ (C) et ŕ (C’). Il est donc conservé par les réflexions I et I’. Donc par leur composée.
transforme
tout point M de
en un point M’ de
tel que les géodésiques PM et PM’ font un angle égal ŕ
, oů
est
l’angle orienté de (C) et (C’). D’oů la proposition.
Proposition 5.19 :Soit une isométrie conforme.
Soient deux géodésiques, (C) et (C’)qui se coupent suivant un point P de l’axe des réels ou alors qui sont deux droites. Supposons que soit la composée de la réflexion hyperbolique I par rapport ŕ (C) avec la réflexion hyperbolique I’ par rapport ŕ (C’).
1. Si (C) et (C’) sont des droites verticales donc est une translation.
2. Si (C) et (C’) se coupent en un point de l’axe des réels. Soit K une inversion par rapport ŕ un cercle de
centre P. Alors
est une translation.
Remarque : ainsi les isométries conformes qui ont un point fixe () correspondent aux translations euclidiennes.
Démonstration :
Le 1. est évident. Supposons donc qu’au moins (C) ou (C’) soit une géodésique-cercle.
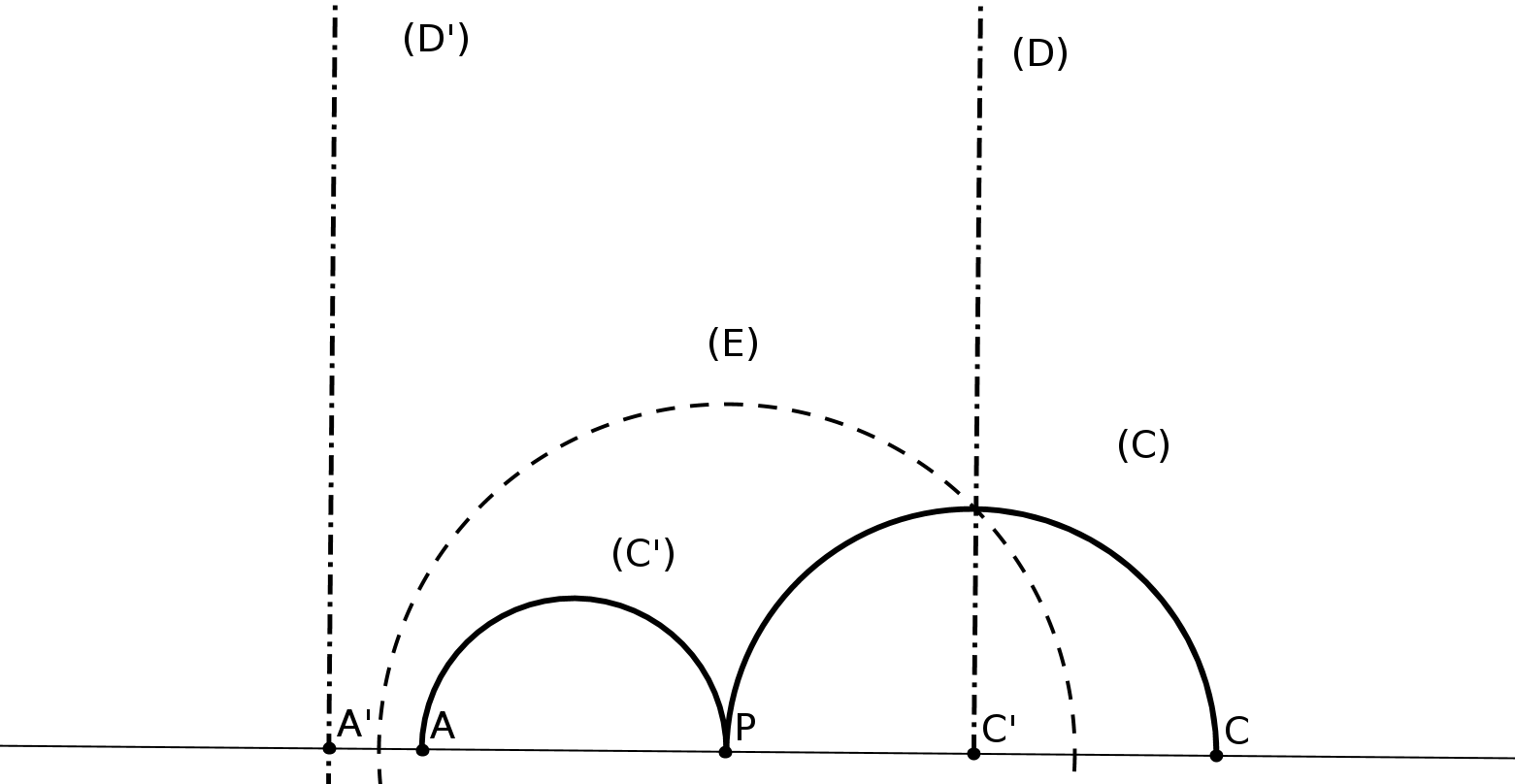
donc, pour tout M de (D), si on pose K(M)=M’, M’ est sur (C) et on a :
. Donc KoIoK est une isométrie anticonforme admettant (D) comme invariant donc KoIoK est la réflexion d’axe .
De męme KoI’oK est la réflexion d’axe (D’). Alors
est la composée de deux réflexions d’axes parallčles : c’est donc une translation. Et
. D’oů
le résultat.
Proposition 5.20 : Soient deux géodésiques (C) et (C’). Il existe une géodésique
les
coupant orthogonalement si et seulement si (C) et (C’) n’ont aucun point commun, ni
réel, ni sur l’axe des réels. Dans ce cas, si on appelle T et T’ les points d’interchapter de
avec (C) et (C’), pour tout point M de (C) et tout point M’ de (C’) on a
.
Démonstration :
En choisissant une inversion, on peut toujours se ramener au cas oů (C) est une
géodésique-droite coupant l’axe réel en un point A. Alors toute géodésique
orthogonale ŕ (C) a pour centre A.
1. Supposons que (C’) coupe (C). Une géodésique orthogonale ŕ (C) est un demi-cercle de
centre A et il n’existe aucune tangente issue de A ŕ (C’) donc (C) et (C’) n’admettent pas de
géodésique orthogonale commune.
2. Si (C’) est aussi une géodésique droite distincte de (C), il n’y a pas non plus évidemment de
géodésique orthogonale commune.
3. Si (C’) passe par A, en prenant une inversion de centre A, (C’) est transformée en une droite
distincte de (C) et on est ramené au cas précédent.
4. A. Si (C’) est une géodésique-cercle sans point commun, ni réel ni sur l’axe des réels, avec
(C), on considčre la tangente AT ŕ (C’) en T. Alors le cercle de centre A et de rayon AT est
orthogonal ŕ (C) et (C’).
B. Soient M et M’ deux points respectivement sur (C) et (C’)
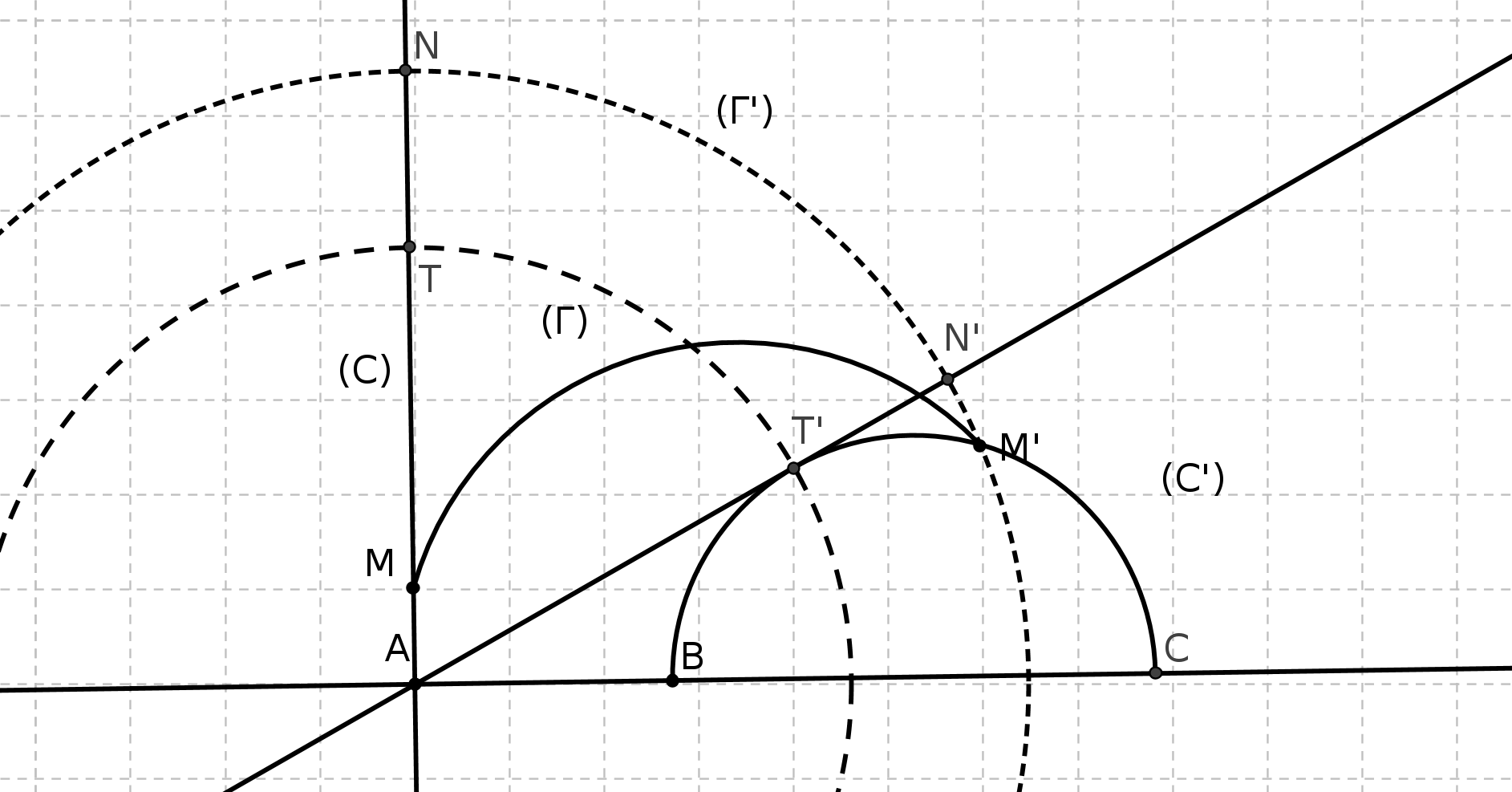
D’aprčs P.5.11, la distance de M’ ŕ (C) est obtenue en prenant la géodésique, , orthogonale ŕ (C) passant par M’. Soit N le point d’interchapter de et (C). Alors .
a pour image par l’homothétie de centre A et qui associe T ŕ N. Alors T’ a pour image le point N’ de l’arc NM’. est hyperbolique donc . De plus .
Donc
donc .
CQFD
On en déduit la proposition et définition suivantes :
Proposition 5.21 :
Soient deux géodésiques (C) et (C’). On pose , M(C) et M’(C’).
1. Si (C) et (C’) ont un point commun réel A, on a =0 et 0 est atteint en A.
2. Supposons que (C) et (C’) n’ont aucun point commun, ni réel, ni sur (). Soient T et T’ les points d’interchapter de la géodésique orthogonale ŕ (C) et (C’). Alors . Cette distance est appelée distance de (C) ŕ (C’).
2. Supposons que (C) et (C’) ont un point commun non réel, mais un point commun sur le bord
ou que (C) et (C’) sont deux
géodésiques-droites, alors
mais 0 n’est pas atteint. Dans ce cas il n’y a pas de distance de (C) ŕ (C’).
Proposition 5.22 :Soit une isométrie conforme.
Soient deux géodésiques, (C) et (C’), sans aucun point commun ni sur l’axe des réels ni en l’infini. Supposons que soit la composée de la réflexion hyperbolique I par rapport ŕ (C) avec la réflexion hyperbolique I’ par rapport ŕ (C’).
Soit
la géodésique orthogonale ŕ (C) et ŕ (C’). Alors, pour tout M de
,
est une constante
. Et, si J est une
inversion transformant
en une droite
est une homothétie.
Démonstration :
Soient J l’inversion par rapport au cercle de centre Q et de rayon PQ, [PQ] étant le diamčtre de . Alors J transforme en la droite , (C) en (C1) et (C’) en (C2).
Comme (C) et (C’) sont orthogonaux ŕ , (C1) et (C2) sont orthogonaux ŕ donc ont pour diamčtre et sont donc concentriques.
On a
donc .
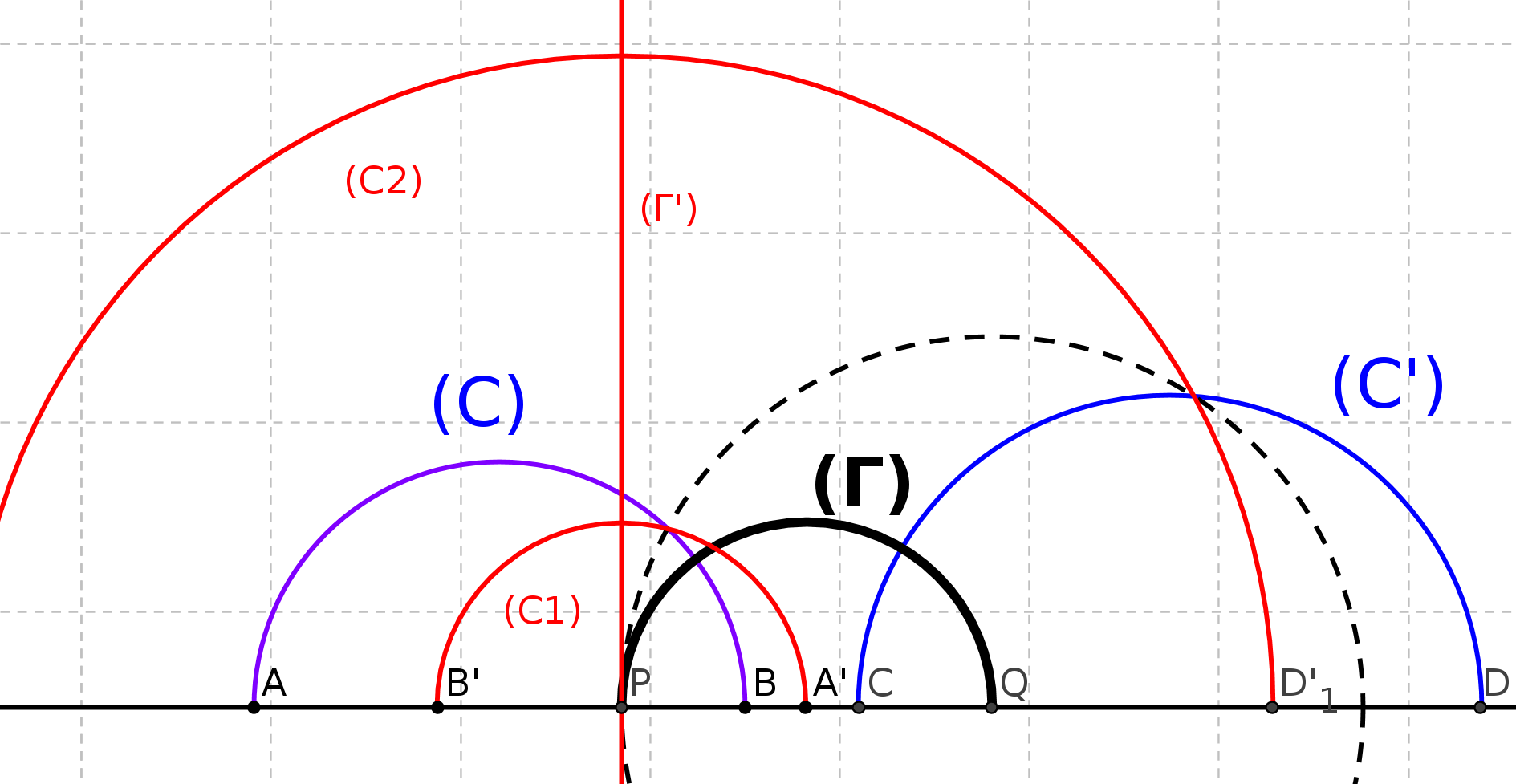
Or et
fixent
les cercles (C2) et (C1) donc sont des inversions par rapport ŕ ces cercles donc leur composée,
est une
homothétie, ,
de centre le centre commun de (C1) et (C2) et de rapport positif
.
Soit M un point de . Alors il existe M’ de tel que . On a :
.
Appelons et les affixes respectives de M’ et h(M’). Alors et ont la meme partie réelle et .
Donc .
Donc .
Ainsi ne
dépendant pas de M,
est constant.
Proposition 5.23 : une isométrie non conforme qui a au moins un point réel invariant est une
réflexion hyperbolique.
Démonstration : soit
une isométrie non conforme admettant P comme point invariant. Soit
la réflexion par rapport ŕ
une géodésique passant
par P. Alors , d’aprčs P.5.18,
est une rotation d’angle .
Donc ,
étant la réflexion de
géodésique telle que
l’angle des géodésiques
et est
. Donc
.
Proposition 5.24 : une isométrie involutive est soit une rotation hyperbolique d’angle
, soit
une réflexion hyperbolique.
Démonstration :
1. Soit une involution conforme.
Soit est une rotation
de centre P, soit
est la composée de deux réflexions par rapport ŕ des géodésiques qui ont un point commun sur
l’axe des réels ou alors aucun point commun.
a. Si est une
rotation d’angle ,
alors est une
rotation d’angle .
Si est l’identité
est la rotation de
centre P et d’angle .
b. Si n’est pas une rotation, alors est :
(i) soit une translation, mais dans ce cas n’est pas involutive.
(ii) soit une homothétie et elle n’est pas involutive.
(iii) soit oů et sont deux réflexions de géodésiques et ayant un seul point commun P sur l’axe des réels. Alors, si K est l’inversion par rapport ŕ la géodésique de centre P, d’aprčs P.5.19, est une translation .
implique que donc . Ceci implique que est l’identité. Donc n’est pas involutive.
(iv) soit
oů et
sont deux réflexions
de géodésiques
et
n’ayant aucun point commun. On démontre comme précédemment que
est l’identité.
Donc
n’est pas involutive.
2. Supposons que soit une isométrie non conforme.
Soit A un point et A’=,
A A’.
id donc
(A’)=A. Soit
I la réflexion hyperbolique
telle que I(A’)=A. Alors
A est invariant par I
et donc I
est une rotation de centre A.
Soit la géodésique passant par A et A’. Alors :
() et K sont deux géodésiques perpendiculaires puisque I(A’)=A. Donc .
() le couple (A ; A’) a pour image (A’ ; A) par donc .
() Donc
a pour
image
par I.
I est une rotation de centre A, donc est la composée de deux réflexions par rapport ŕ deux géodésiques passant par A et telles que l’angle de soit le double de l’angle des géodésiques.
Prenons pour l’une des géodésiques et pour l’autre et posons II. Alors IIIo.
Donc IIoI. On a I(A)=A’ et IIo(A)=II(A’)=I(A’). Donc
I(A’)=A’
donc et
ont deux points
communs donc . donc
est l’identité donc
I.
Donc
est une réflexion hyperbolique.
Proposition 5.25 : une isométrie non conforme qui laisse globalement invariante une
géodésique est une réflexion hyperbolique.
Démonstration : soit une isométrie non conforme et soit une géodésique globalement invariante par . Soit P un point et P’ son image par .
Soit la géodésique telle que P a pour image P’ par la réflexion hyperbolique, , par rapport ŕ la géodésique .
Soit A un point d’interchapter de l’axe des réels avec et soit B son image par .
On a P’)=P.
et . Donc
est une isométrie
conforme qui a au moins deux points invariants, l’un réel et l’autre sur l’axe des réels. Donc(P.5.14)
est l’identité donc I est la
réflexion par rapport ŕ .
Nous n’avons pas, pour l’instant, parler de droites parallčles. On en n’a pas besoin ! Cependant si
l’on veut faire la liaison avec la démarche de Lobatchevski, reprenons son postulat P’5 en l’adaptant
au travail fait dans ce chapitre. Rappelons le :
P’5 : Soit P un point quelconque et une droite AB quelconque ne passant
par P. Alors il existe deux droites CD et EF distinctes passant par P telles
que :
1. CD et EF ne coupent pas AB męme prolongées de chaque côté indéfiniment.
2. Toute droite passant par P et coupant l’angle coupe AB.
3. Toute droite passant par P et coupant l’angle
ou
EPC ne coupe pas AB męme prolongée indéfiniment.
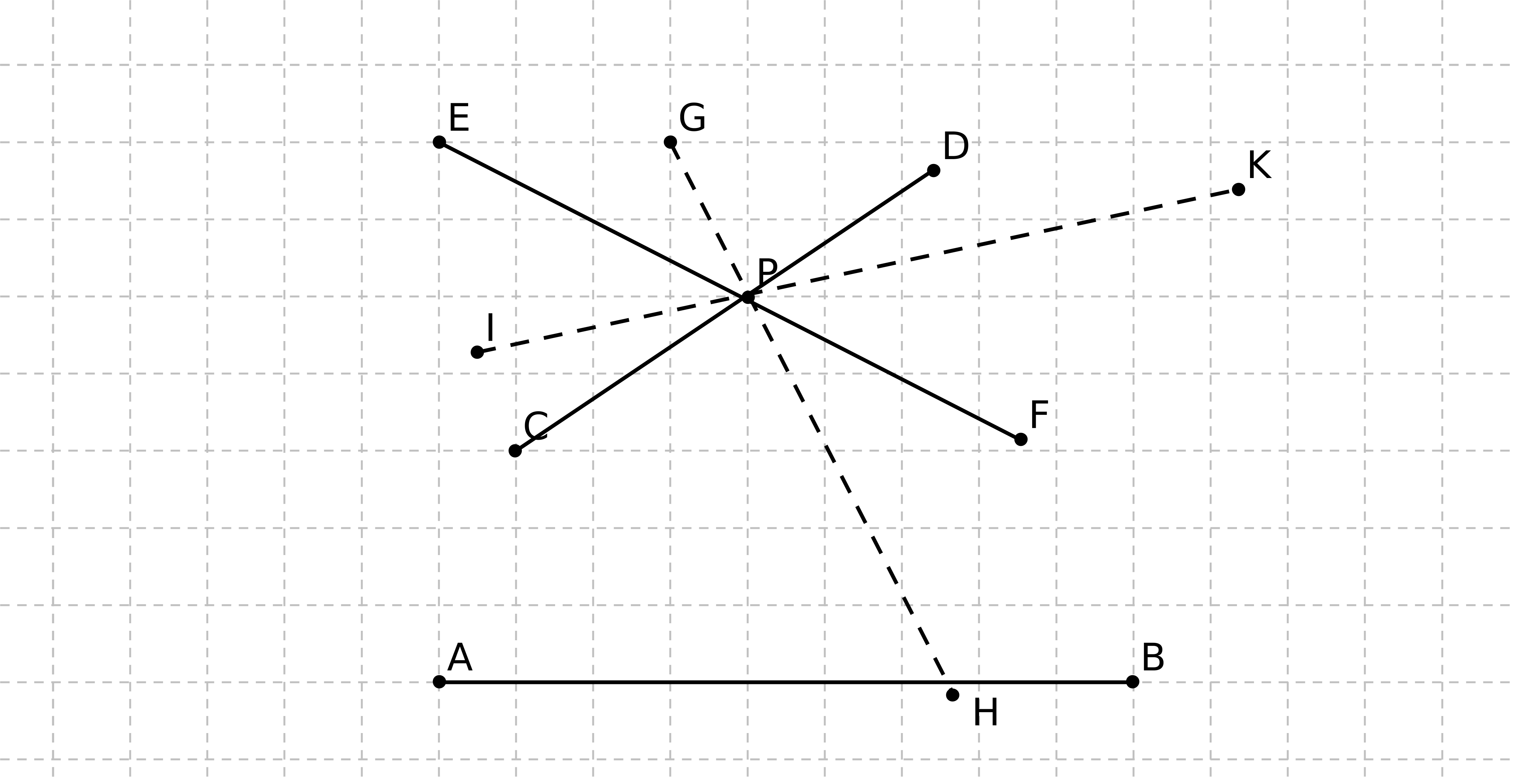
N’oublions pas que, dans cette figure, on trace les droites de Lobatchevski comme des droites
euclidiennes alors qu’elles ne le sont pas !
P’5 devient le théorčme suivant :
Proposition 5.25 : Soit P un point quelconque et une géodésique (AB) quelconque ne passant
pas par P. Alors il existe deux géodésiques (CD) et (EF)distinctes passant par P telles
que :
1. (CD) et (EF) ne coupent pas AB męme prolongées de chaque côté indéfiniment.
2. Toute géodésique passant par P et coupant l’angle coupe AB.
3. Toute géodésique passant par P et ne coupant pas l’angle
( B
étant le point ŕ l’infini si AB est une géodésique droite) ne coupe pas AB męme prolongée
indéfiniment.
Ce théorčme conduit ŕ la définition suivante :
Définition : les géodésiques (CD) et (EF) sont appelées parallčles hyperboliques par rapport ŕ P et notées h-parallčles.
Toute géodésique passant par P et ne coupant pas AB est appelée parallčle divergente par
rapport ŕ P et notée d-parallčle.

Sur la figure, la géodésique est d- parallčle ŕ (AB).
Remarque : deux géodésiques h-parallčles sont deux géodésiques qui ont un point commun sur l’axe des réels (ou ŕ l’infini dans le cas de deux géodésiques-droites).
Deux géodésiques sont d- parallčles si elles n’ont aucun point commun, ni réel, ni sur l’axe
des réels, ni ŕ l’infini.
Le théorčme 10.1 du chapitre précédent était : les parallčles hyperboliques PH et PF font
des angles aigus égaux avec la perpendiculaire PG ŕ AB.
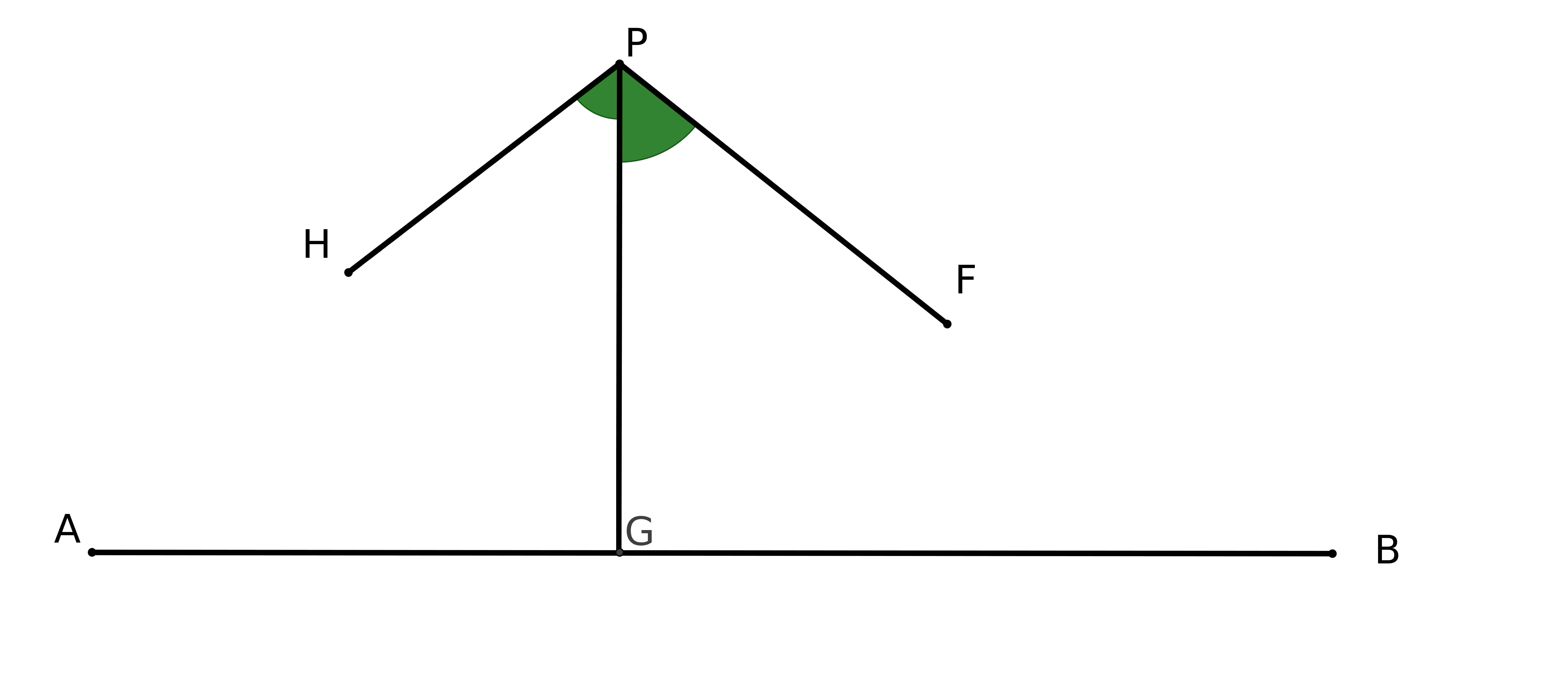
il devient, ici :
Proposition 5.26 : les géodésiques h-parallčles (en rouge sur la figure) font des angles égaux avec la géodésique orthogonale (en jaune-pointillée sur la figure) ŕ AB passant par P.
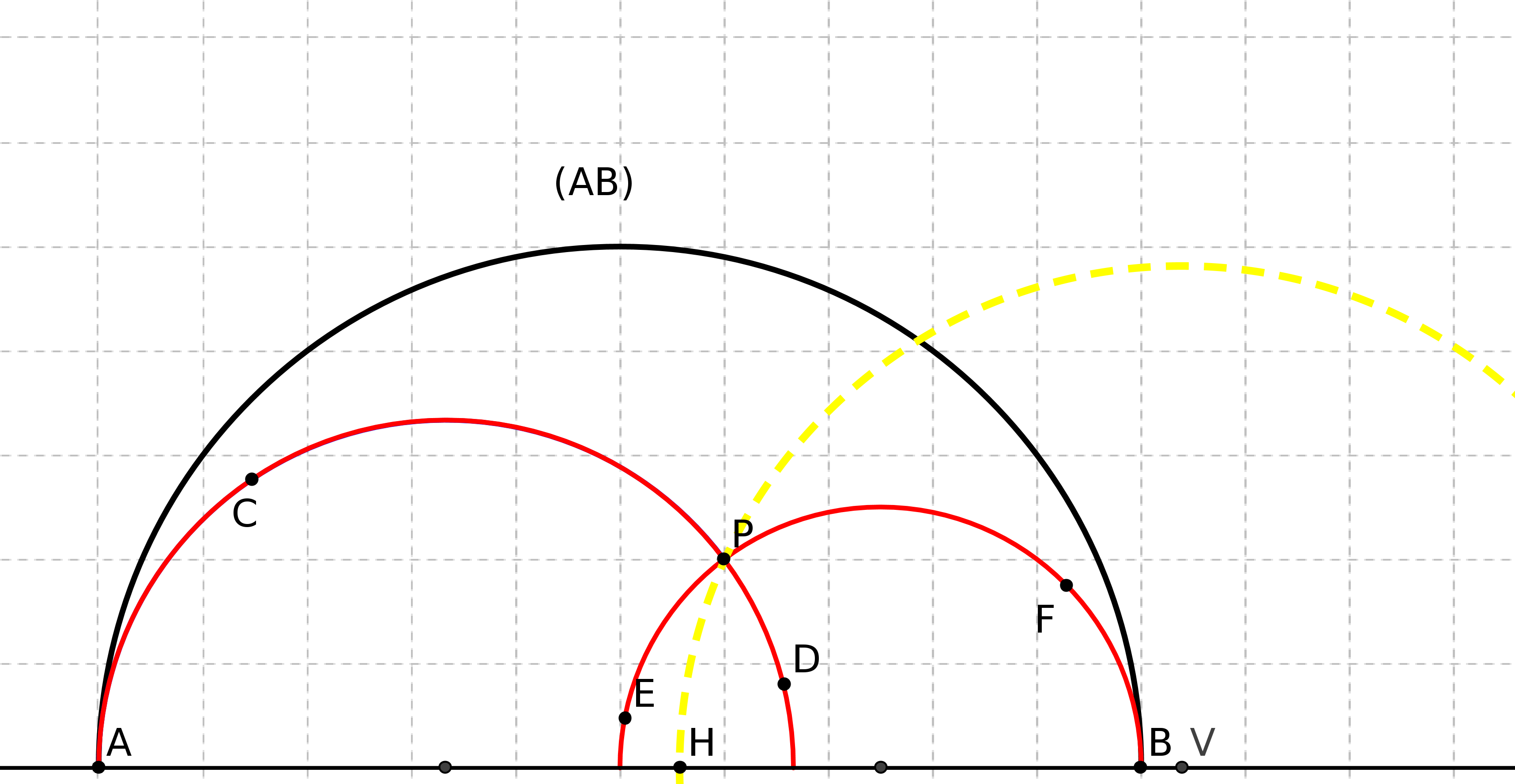
Démonstration : tout simplement la géodésique bleue est une bissectrice des géodésiques
rouges. En effet l’inversion par rapport ŕ la bleue conserve AB et transforme A en B et P en P donc
transforme une géodésique rouge en l’autre rouge.
Lobatchevski a démontré, par exemple, aussi le résultat suivant :
Proposition 5.27 : deux géodésiques parallčles ont une géodésique commune orthogonale
si et seulement si elles sont divergentes.
Il a enfin démontré que deux triangles semblables étaient isométriques, etc,etc...
Terminons par le quadrilatčre de Sacchéri :
Proposition 5.28 : Soit le quadrilatčre ABCD ( A, B, C et D sont réels) tel que :
1. (A,D)=(B,C)
2. les géodésiques (AD) et (BC) sont orthogonales ŕ (AB).
3. C et D sont du męme côté de la géodésique (AB) (c’est ŕ dire que l’ angle orienté des géodésiques (AD) et (AB) est l’opposé de celui des géodésiques (BC) et (AB).
Alors l’angle des géodésiques (AC) et (CD) est égal ŕ celui de (BD) et (CD).
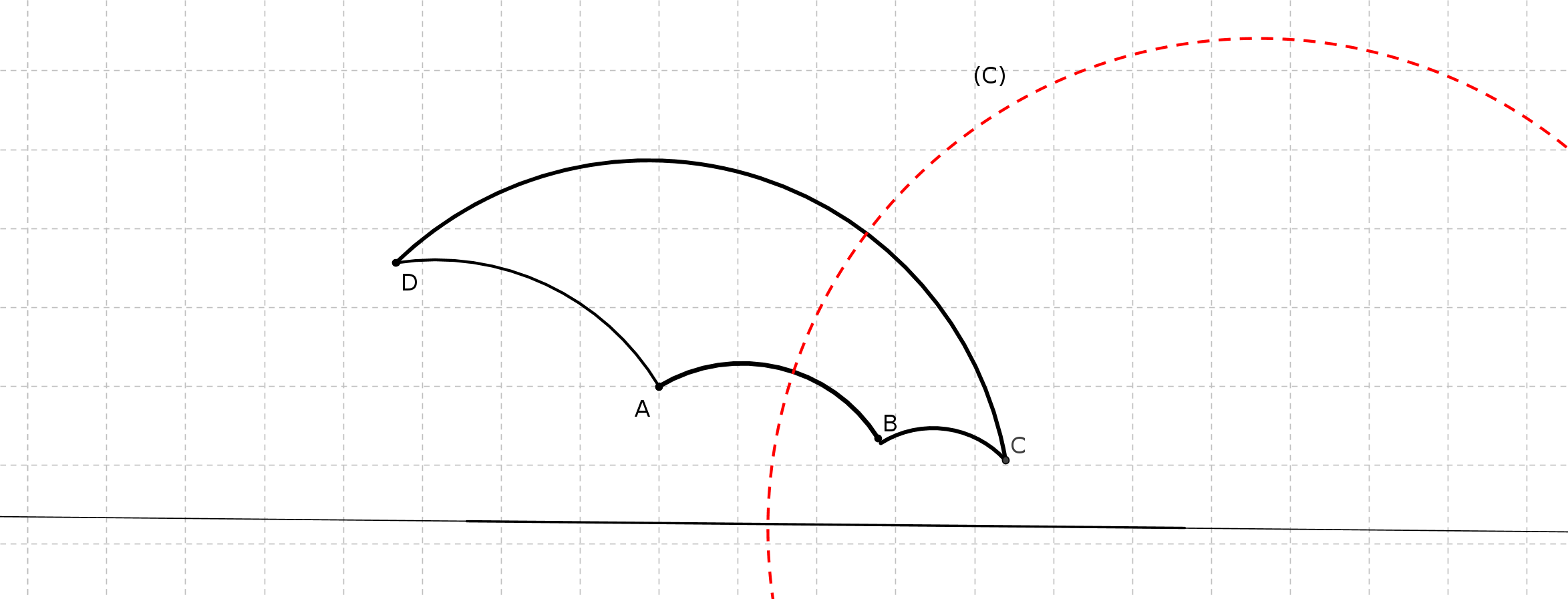
Démonstration :
Soit I l’inversion hyperbolique telle que I(A)=B. Alors (AB) est globalement invariante par I. La
géodésique (AD) a pour image, par I, La géodésique orthogonale ŕ (AB) passant par B, c’est
donc (BC).
Soit D’ l’image de D par I. On a
(A,D)=(B,D’)=(B,C).
Comme I est anticonforme on obtient D=C’. Donc la géodésique (DC) est globalement invariante
et l’angle des géodésiques (AC) et (CD) est égal ŕ celui de (BD) et (CD).